Решение СЛАУ и матрицы в Matlab
Доброго времени суток, читатели! Сегодня мы поговорим о матрицах в Matlab, об их применении в решении систем линейных алгебраических уравнений. Подробно разберем методы решения, и для этого необходимо знание нескольких базовых алгоритмов.
Также стоит отметить, что у каждого алгоритма, которым мы будем искать решение СЛАУ в Matlab, своя скорость нахождения этого решения, наличие или отсутствие условия выполнения алгоритма и т.д.
В традициях нашего сайта разберём на примере:
Решить систему линейных уравнений:
4*a + b - c = 6
a - b + c = 4
2*a - 3*b - 3*c = 4
Метод обратной матрицы в Matlab
Начнем с достаточно распространенного метода. Его суть состоит в том, что сначала необходимо выписать коэффициенты при a, b и c (то есть те коэффициенты, которые находятся слева) в одну матрицу, а свободный член (то есть то, что справа) в другую.
В итоге у нас получится 2 матрицы:
A=[4 1 -1; 1 -1 1; 2 -3 -3]; % коэффициенты B=[6; 4; 4];
Для реализации этого метода (и следующих методов тоже) требуется одно условие: чтобы определитель матрицы, составленной из коэффициентов левой части не был равен нулю. Проверка на определитель:
det(A)
Вывод: 30
После проверки условия можем перейти к следующему шагу: нахождение обратной матрицы. В Matlab для этого используется оператор inv.
А само решение СЛАУ в Matlab находится как перемножение найденной обратной матрицы на матрицу свободных членов:
x=inv(A)*B Вывод: 2 -1 1
Мы получили 3 значения, которые и соответствуют нашим коэффициентам: то есть a = 2, b = -1, c = 1. Можете проверить, подставив полученные ответы в исходную систему, и убедиться, что мы решили СЛАУ правильно.
Также следует отметить, что матрицы нужно перемножать именно, как сделали мы, то есть слева обратная матрица, справа матрица свободных членов.
Если вы не все поняли, то советую вам почитать нашу статью по основам Matlab.
Метод Гаусса
Метод Гаусса в Matlab реализуется достаточно просто: для этого нам нужно всего лишь изучить один новый оператор.(\) - левое деление.
При следующей записи:
x = A\B Вывод: 2 -1 1
Мы получим ответы на нашу исходную систему. Только заметьте, мы решили СЛАУ стандартным набором функций в Matlab, и желательно этот оператор использовать когда матрица коэффициентов квадратная, так как оператор приводит эту матрицу к треугольному виду. В других случаях могут возникнуть ошибки.
Метод разложения матрицы
Теперь поговорим о разложении матрицы. Нахождение решения через разложение матрицы очень эффективно. Эффективность обусловлена скоростью нахождения решения для данного вида систем и точностью полученных результатов.
Возможны следующие разложения:
- разложение Холецкого
- LU разложение
- QR разложение
Разберём решение через LU и QR разложение, так как в задачах чаще всего встречается задание на решение именно через такие разложения.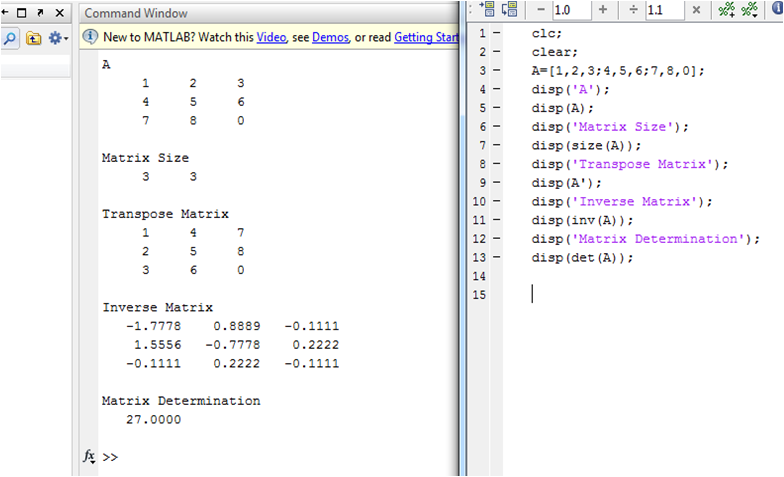
Основное отличие этих двух разложений: LU разложение применимо только для квадратных матриц, QR — возможно и для прямоугольных.
LU разложение
Решим выше предложенную задачу через LU разложение:
[L, U] = lu(A);
Вывод:
L =
1 0 0
0.25 1 0
0.5 2.8 1
U =
4 1 -1
0 -1.25 1.25
0 0 -5
Затем:
y = L\B;
x = U\y
Вывод:
2
-1
1
QR разложение
И через QR разложение соответственно:
[Q, R] = qr(A); x = R\(Q'*B) Вывод: 2.0000 -1.0000 1.0000
Отметим, что апостроф ( ' ) после Q означает транспонирование.
Стандартные функции Matlab
Так же Matlab предлагает функцию linsolve, с помощью которой возможно решить систему линейных алгебраических уравнений. Выглядит это так:
x = linsolve(A,B) Вывод: 2 -1 1
Как видите, ничего сложного тут нет, на то они и стандартные функции Matlab.
Повторение
Итак, сегодня мы с вами изучили несколько методов для  Давайте их повторим на другом примере:
Давайте их повторим на другом примере:
Решить систему линейных уравнений:6*a - b - c = 0
a - 2*b + 3*d = 0
3*a - 4*b - 4*c = -1
A=[6 -1 -1; 1 -2 3; 3 -4 -4]; B=[0; 0; -1];
- Методом обратной матрицы:
x=inv(A)*B
Вывод:
0.0476
0.1810
0.1048
x = A\B
Вывод:
0.0476
0.1810
0.1048
[L, U] = lu(A);
y = L\B;
x = U\y
Вывод:
0.0476
0.1810
0.1048
[Q, R] = qr(A);
x = R\(Q'*B)
Вывод:
0.0476
0.1810
0.1048
На этом я с вами попрощаюсь, надеюсь, вы научились применять матрицы в Matlab для решения СЛАУ.
Поделиться ссылкой:
Похожееmatlab — Как точно вычислить инверсию матрицы?
Я пытаюсь вычислить обратную матрицу P, но если я умножу inv(P)*P, MATLAB не вернет единичную матрицу. (-12)). Однако в моем приложении мне нужно больше точности.
(-12)). Однако в моем приложении мне нужно больше точности.
Что я могу сделать в этой ситуации?
1
gustavoreche 23 Мар 2016 в 01:40
2 ответа
Лучший ответ
Только если вам явно нужна обратная матрица, вы используете { {X0}}, в противном случае вы просто используете оператор обратной косой черты \.
В документации по inv() прямо указано:
x = A\bвычисляется иначе, чемx = inv(A)*b, и рекомендуется для решения систем линейных уравнений.
Это связано с тем, что оператор обратной косой черты или
x = A\Bрешает систему линейных уравненийA*x = B.(-12), помимо вышеупомянутой неточности функции
inv(), существует точность с плавающей запятой. Этот пост о проблемах MATLAB довольно информативен, с более общим постом по информатике на нем здесь. В принципе, если вы вычисляете числа, не беспокойтесь (по крайней мере, слишком сильно) об ошибках на 12 порядков меньше.14
Adriaan 15 Июл 2020 в 07:56
У вас есть так называемая плохо обусловленная матрица. Взять инверсию такой матрицы рискованно. В общем, делать инверсию любых матриц, кроме самых маленьких (таких как те, которые вы видите во введении в учебник линейной алгебры), рискованно. Если необходимо, вы можете попробовать взять псевдообратную модель Мура-Пенроуза (см. Википедию), но даже это не является надежным.
0
Forklift17 22 Мар 2016 в 22:44
Моделирование систем — тест 11
Главная / Алгоритмы и дискретные структуры / Моделирование систем / Тест 11 Упражнение 1:
Номер 1Когда линейная модель наблюдений будет моделью неполного ранга?
Ответ: (1) когда число входных переменных меньше числа выходных 
 (2) когда ранг матрицы регрессоров меньше числа коэффициентов модели 
 (3) когда вектор наблюдений линейно независим от входных переменных 
 (4) когда детерминант информационной матрицы равен нулю 
 (5) когда детерминант информационной матрицы не равен нулю 
Номер 2Как называют обобщенную обратную матрицу?
Ответ:  (1) вырожденной матрицей 
 (2) сингулярной обратной матрицей 
 (3) g-обратной матрицей 
 (4) разреженной матрицей 
Номер 3Как называют уравнение, из которого определяют коэффициенты линейной модели наблюдений?
Ответ: (1) характеристическим 
 
(2) квадратным   (3) нормальным 
 (4) приведенным 
Номер 4Если в уравнении линейной модели наблюдений учитываются случайные помехи, то каким должно быть их математическое ожидание?
Ответ: (1) положительным 
 (2) отрицательным 
 (3) нулевым 
  (4) не имеет значения 
Упражнение 2:
Номер 1Почему традиционными методами не может быть решено уравнение относительно неизвестных коэффициентов линейной модели наблюдений?
Ответ: (1) потому что недостаточно наблюдений 
 (2) потому что детерминант информационной матрицы равен нулю 
 (3) потому что детерминант информационной матрицы не равен нулю 
 (4) потому что информационная матрица является вырожденной 
 (5) потому что информационная матрица является невырожденной 
Номер 2В каком случае применяется обобщенная обратная матрица?
Ответ: (1) когда коэффициенты при неизвестных параметров линейных уравнений наблюдений образуют сингулярную матрицу 
 (2) когда коэффициенты при неизвестных параметров линейных уравнений наблюдений образуют несингулярную матрицу 
 (3) когда необходимо упростить расчеты по поиску неизвестных параметров линейных уравнений наблюдений 
 (4) когда коэффициенты при неизвестных параметров линейных уравнений наблюдений являются случайными и не подчиняются нормальному распределению 
Номер 3В каком случае числовая матрица R будет идемпотентной?
Ответ:  (1) если где Е — единичная матрица 
 (2) если где Т — символ транспонирования 
 (3) если  
 (4) если  
Упражнение 3:
Номер 1В каком случае матрица регрессоров будет матрицей неполного ранга?
Ответ: (1) если хотя бы один из ее столбцов будет линейно зависим от любого другого столбца 
 (2) если все столбцы будут линейно независимы 
 (3) если все строки будут линейно независимы 
 (4) если один из столбцов будет нулевым 
Номер 2Что означает линейная зависимость столбцов матрицы произвольного ранга?
Ответ: (1) если хотя бы один из столбцов матрицы получен в результате возведения в квадрат любого другого 
 (2) если хотя бы один из столбцов матрицы получен в результате возведения в куб любого другого 
 (3) если хотя бы один из столбцов матрицы получен в результате умножения на постоянное число любого другого столбца 
 (4) если хотя бы один из столбцов матрицы получен в результате сложения всех элементов любого другого столбца с постоянным числом 
Номер 3В каком случае квадратная числовая матрица Q будет симметричной?
Ответ:  (1) если  
 (2) если где Т — символ транспонирования 
 (3) если  
 (4) если  
Номер 4Какие столбцы матрицы регрессоров используются при расчете обобщенной обратной матрицы?
Ответ: (1) те, которые ненулевые 
 (2) те, из которых можно сформировать невырожденную матрицу 
 (3) те, из которых можно сформировать вырожденную матрицу 
 (4) произвольные 
 (5) те, из которых можно сформировать матрицу, имеющую соответствую-щую обратную 
Упражнение 4:
Номер 1Если ранг матрицы регрессоров равен k, то, как он изменится в случае создания линейной зависимости двух строк этой матрицы?
Ответ: (1) станет равным k + 1 
 (2) станет равным нулю 
 (3) станет равным k — 1 
 (4) не изменится 
 (5) станет равным 2k 
Номер 2Что означает линейная зависимость строк матрицы произвольного ранга?
Ответ: (1) если хотя бы одна из строк матрицы получена в результате возведения в квадрат любой другой 
 (2) если хотя бы одна из строк матрицы получена в результате возведения в куб любой другой 
 (3) если хотя бы одна из строк матрицы получена в результате деления на постоянное число любой другой строки 
 (4) если хотя бы одна из строк матрицы получена в результате вычитания из всех элементов любой другой строки постоянного числа 
Номер 3Можно ли обращать квадратную матрицу при линейной зависимости только двух ее строк?
Ответ: (1) можно, если эти строки состоят из положительных чисел 
 (2) можно, если эти строки состоят из отрицательных чисел 
 (3) нельзя 
 (4) для обращения это не имеет значения 
 (5) можно, если квадратная матрица нижняя или верхняя треугольная 
Номер 4Чему равен детерминант обобщенной обратной матрицы размера ?
Ответ: (1) равен целому неотрицательному числу 
 (2) равен нулю 
 (3) равен вещественному неотрицательному числу 
 (4) равен вещественному отрицательному числу 
 (5) детерминант такой матрицы рассчитывать нельзя 
Упражнение 5:
Номер 1На какое число подматриц разбивают матрицу регрессоров для расчета обобщенной обратной матрицы?
Ответ: (1) на две подматрицы 
 (2) на три подматрицы 
 (3) на четыре подматрицы 
 (4) на пять подматриц 
Номер 2Как изменится линейное уравнение наблюдений неполного ранга, если к обеим частям уравнений применить оператор математического ожидания?
Ответ: (1) оно не изменится 
 (2) число слагаемых в правой части увеличится на единицу 
 (3) число слагаемых в правой части уменьшится на единицу 
 (4) левая часть станет равной нулю 
Номер 3По какому вероятностному закону должны быть распределены элементы случайного вектора, входящего в уравнение наблюдений неполного ранга?
Ответ: (1) по закону Стьюдента 
 (2) по закону Гаусса 
 (3) по закону Пуассона 
 (4) по закону Вейбулла 
 (5) по закону Пирсона 
Номер 4Чему равен ранг обобщенной обратной матрицы?
Ответ: (1) равен числу неизвестных параметров линейной модели наблюдений 
 (2) равен нулю 
 (3) равен числу линейно независимых столбцов матрицы регрессоров 
 (4) равен числу, на единицу меньшего числа неизвестных параметров линейной модели наблюдений 
 (5) равен числу линейно независимых строк матрицы регрессоров 
Упражнение 6:
Номер 1С помощью какой функции системы MATLAB определяется ранг прямоугольной матрицы?
Ответ: (1) randg 
 (2) residue 
 (3) rank 
 (4) ranksum 
 (5) range 
Номер 2Как можно определить размерность вектора наблюдений Y в системе MATLAB?
Ответ: (1) length(Y) 
 (2) size(Y, 1) 
 (3) size(Y, 2) 
 (4) schur(Y) 
Номер 3Какая из перечисленных функций системы MATLAB может быть использована при расчете обобщенной обратной матрицы?
Ответ: (1) inv 
 (2) size 
 (3) length 
 (4) zeros 
 (5) range 
Номер 4Какая функция системы MATLAB может быть использована для определения оценки вектора параметров линейной модели наблюдений неполного ранга?
Ответ: (1) step 
 (2) find 
 (3) eye 
 (4) eig 
 (5) exp 
Д-аналог метода определения однопараметрической обобщенной обратной матрицы Дразина, основанный на скелетном разложении матрицы Текст научной статьи по специальности «Математика»
УДК 621.
52+511.52
Д-АНАЛОГ МЕТОДА ОПРЕДЕЛЕНИЯ ОДНОПАРАМЕТРИЧЕСКОЙ ОБОБЩЕННОЙ ОБРАТНОЙ МАТРИЦЫ ДРАЗИНА, ОСНОВАННЫЙ НА СКЕЛЕТНОМ РАЗЛОЖЕНИИ МАТРИЦЫ
Асланян Гамлет Арменович,
аспирант кафедры информационных технологий и автоматизации Государственного инженерного университета Армении (Политехник), Армения, 0009, г. Ереван, ул. Теряна, 105. E-mail: [email protected]
Симонян Саргис Оганесович,
д-р техн. наук, заведующий кафедрой информационных технологий и автоматизации Государственного инженерного университета Армении (Политехник), Армения, 0009, г. Ереван, ул. Теряна, 105. E-mail: [email protected]
Актуальность работы обусловлена широким применением обобщенной обратной матрицы Дразина в теории конечных цепей Маркова, в решении нестационарных линейных систем дифференциальных уравнений, при решении рекуррентных уравнений и задач оптимального управления динамическими системами, при различных вопросах систем автоматического управления и др.
Цель исследования: разработка алгоритма нахождения матричных дискрет однопараметрической обобщенной обратной матрицы Дразина в области дифференциальных преобразований и восстановления оригинала с помощью обратных Д-преобра-зований.
Методы исследования: теория псевдообратных численных матриц Дразина, теория обобщенных обратных параметрических матриц, скелетное разложение матрицы, прямые и обратные дифференциальные преобразования, линейные преобразования линейного пространства, линейная алгебра, численные расчеты матричных дискрет с использованием программного пакета MATLAB ver. R2011b.
Результаты: Представлен достаточно простой численно-аналитический метод определения однопараметрической обобщенной обратной матрицы Дразина, основанный на прямых и обратных дифференциальных преобразованиях, который легко реализуем средствами современных информационных технологий. Иллюстрация этого метода на одном модельном примере вычисления частного случая обобщенной обратной матрицы Дразина — групповой обратной матрицы, показала его высокую вычислительную эффективность и малую погрешность вычислений.
Ключевые слова:
Однопараметрическая обобщенная обратная матрица Дразина, скелетное разложение матрицы, индекс матрицы, дифференциальные преобразования, информационные технологии.
Введение
Допустим, имеем однопараметрическую квадратную матрицу A(t) с размерами nxn, рангом r (заметим, что параметр t может быть временем,
оператором Лапласа ( S ~ — ] или другим параме-V dtJ
тром), и индекс матрицы равен k=index(A(t)), где k — наименьшее неотрицательное целое число, при котором rank(Ak+1(t))=rank(Ak (t)). Псевдообратной Дразина AD(t) к матрице A(t) называется матрица, удовлетворяющая всем нижеприведенным условиям [1] (по аналогии с числовыми матрицами):
Ad (t)A(t) Ad (t) = Ad (t),
A(t) Ad (t) = Ad (t) A(t),
Ak+1 (t) Ad (t) = Ak (t).
В частном случае, когда index(A(t))=1, обобщенную обратную Дразина назовем групповой обратной A#(t) [1] (также по аналогии с числовыми матрицами).
Обобщенные обратные матрицы Мура-Пенроу-за [1-3] достаточно хорошо изучены [4-7] и нашли широкое применение при решении задач оптимального управления [8, 9], некорректных задач
[10], матричных уравнений [11], при сингулярном разложении [12] и др. Обобщенная обратная матрица Дразина и групповая обратная, с другой стороны, нашли применение в теории типа конечных цепей Маркова [13], в решении нестационарных линейных систем дифференциальных уравнений [14], в модели населения Лесли и ее обратной проекции [1, 15], а также при решении рекуррентных уравнений [1, 16] и др.
В работе [1] доказана теорема об определении псевдообратной матрицы Дразина с помощью серий скелетных разложений исходной матрицы.
0, а Ап(£)=В(£)С(£) — скелетное разложение матрицы Ап (£).
В частном случае, когда £пйех(А(£))=1 и А(£)=В(£)С(£) является скелетным разложением А(£), групповая обратная А#(£) равна [1]
А#(?) = А° (?) = Б(? )[С (?) Б(?)] -2С (?). (1)
Математический аппарат
Допустим, что А(£) — матрица с аналитическими элементами. Представим алгоритм вычисления скелетного разложения Ап(£):
А” (?) = Б(? )С (?),
где В(£) — нижнетреугольная матрица с размерами пхг, а С(£) — верхнетреугольная матрица с размерами гхп.
Выберем линейно независимых столбцов матрицы А(£) и составим матрицу В(£). В этом случае столбцы матрицы С(£) вычисляются следующим образом:
■I ^
с у (?) = Б(?) а”у (?), у = 1, ”,
где с у (?) и а” у (?) — ;-е столбцы матриц С(£) и Ап(£) соответственно, а В(£) — обобщенная обратная матрица к В (£) (при классификации обобщенных обратных матриц, представленной в работе [17], такая матрица называется (0-обратной).
где су (?) и а” у (?) — ;-е столбцы матриц С(£) и Ап(£) соответственно.
Шаг 4. Обозначив Х(£)=С(£)В(£), вычисляется обратная матрица Х_1(£).
Шаг 5. Вычисляется обобщенная обратная матрица Дразина Ав(£) в виде разложения
А° (?) = А”-1(?) Б(?)Х-2(?)С (?).
Теперь рассмотрим Д-аналог метода определения обобщенной обратной матрицы Дразина. С учетом приведенных соотношений алгоритм определения обобщенной обратной матрицы Дра-зина в области дифференциальных преобразований [18] будет выглядеть следующим образом: Шаг 1. Вычисляются матричные дискреты
» дкА(?)
Ai K) = — •v ‘ K І
dtK
, K = О, да —
— Ait) = Nlit,tv,H, AiK)),
b( k _ HK s’bci)|
b( k ) = ГКТ ^^|
, К = О, да —
— B(t) =Ki(t, tv, H, B(K)),
K
An (K) = An-1(k)* A(k) = £ A1 -1( 1) A(k -1),
/=0
где K=0,<» — целочисленный аргумент; A(K), B(K) и An(K), K=0,<» — матричные дискреты матричных оригиналов A(t), B(t) и An(t) (прямые дифференциальные преобразования), H — масштабный коэффициент; tv — центр аппроксимации,
Kj(t,tv,H,A(K)), K2(t,tv,H,B(K)) — обратные дифференциальные преобразования, восстанавливающие оригиналы — матрицы A(t) и (t) соответственно, символ * — знак Т-умножения (свертки), а символ — — знак перехода из области оригиналов в область Д-изображений и наоборот [18].
_ Шаг 2. Вычисляются матричные дискреты B(K), К=0,<» с помощью алгоритма, представленного в работе [17].
Шаг 3. Вычисляются матричные дискреты C(K), для которых
i — i к _ i
cy(K) = B(K) * а», (K) = £B(1) а», (K -1),
К = О, да, Vj = 1, n,
(2)
где Су (К) и а”у (К) — ;-е столбцы матричных дискрет С(К) и Ап(К) соответственно.
Шаг 4. Обозначив Х(£)=С(£)В(£), вычисляются матричные дискреты ХН)(К) с помощью алгоритма, предложенного в работе [19] (заметим, что ХН)(К) — К-я матричная дискрета обратной матрицы Хч(£), а не обратная матрица К-й матричной дискреты Х(К)).
) восстанавливается оригинал — обобщенная обратная матрица Дразина Ав(£).
Пример. Допустим, имеем однопараметрическую матрицу
I=О
зо
t
-t
0
it2 — 2)
2t
it2 + 2t — 2)
(3t -12) -3t -12
Можно легко убедиться, что ранг матрицы A(t) равен 2, ибо каждый элемент ее третьей строки равен сумме соответствующих элементов первых двух строк, а также, что индекс матрицы k=index(A (t))=1, так как rank (A\t))=rank(A(t))=2.
Следовательно, вычисляется групповая матрица AD(t)=A#(t) с помощью упрощенного соотношения (1). Выбирается матрица B (t):
‘ t (t2 — 2)
B(t) = -t 2t
0 (t2 + 2t — 2)
Вычисляются следующие матричные дискреты
tv=-1, H =І , K= І0:
1 -l -4′ г l -2 5 ‘
A(0) = 1 -2 3 , A(1) = -l 2 -3
_ 0 -3 -1 _ 0 0 2
го 1 -1′
A(2) = 0 0 0 A( К) = [0], К = 3 , да;
_o 1 -1
Г-l -1′ г 1 -2′
B(0) = l -2 , B(1) = -1 2 ,
_ 0 -3_ _ 0 0 _
0 1 00 0 1
, BiК) = [0], К = 3, да.
С помощью алгоритма, представленного в р-або-те [17], вычисляются -матричные дискреты B(K) (0-обратной матрицы B(t):
Bi0) =
Bi2) =
Bi4) =
Bi8) =
0
0 0
-0,667 0,333 0′
-0,333 -0,333 0_ -0,222 0,778 0′
-0,111 -0,111 0_ -0,074 0,926 0′
-0,037 -0,037 0 -0,025 0,975 0′
-0,012 -0,012 0_ -0,008 0,992 0′
-0,004 -0,004 0_ г-0,027 0,997 0
-0,001 -0,001 0 1 0′
0
Далее вычисляются матричные дискреты С(К) с помощью (2) (представлены только первые 4 матричные дискреты):
Го
С(1) =
Ci0) =
Ci2) =
3,667
0,333
0,889
0,444
Ci3) =
0
0
0
0
-1,333
-0,667
-0,444
-0,222
Согласно шагу 4, вычисляются матричные дискреты ХН)(К) (представлены только первые 4 матричные дискреты):
X(-о(0) =
X(-1)(1) =
к-1)
X(-1)(3) =
-0,2 0,8
-0,067 -0,067 _
-0,013 0,987 ‘
-0,027 -0,027 _
-0,019 0,981 ‘
-0,015 -0,015_
-0,008 0,992 ‘
-0,008 -0,008
Вычисляются матричные дискреты АВ(К) обобщенной обратной матрицы Дразина Ав(£) с помощью свертки (3) (представлены только первые 4 матричные дискреты):
-0,0044 0,2б22 0,0711
A0 (0) = -0,04889 -0,1156 -0,2178
-0,05333 0,1467 -0,1467
г 0,0231 0,2631 0,0035 ‘
A0 (1) = -0,0524 -0,0124 -0,0542
-0,0293 0,2507 -0,0506
г 0,0527 0,2524 0,0098 ‘
A0 i2) = -0,0095 0,002 -0,0509
-0,0043 0,2544 -0,041 _
г 0,0384 0,252 0,004
A0 i3) = -0,008 -0,0008 -0,0232
-0,0042 0,2512 -0,0192
, при К = 1,3,5,7,9.
Не вдаваясь в подробности, приведем окончательные результаты: на рисунке (а-и) представлены графики элементов обобщенной обратной матрицы Дразина Ав(і) и оригинала, полученного с учетом вышеприведенных матричных дискрет с помощью дифференциально-падеевских преобразований [18] при £у=-1, Я=1, К=0,10. На всех рисунках сплошные линии соответствуют аналитическому решению, а пунктирные — ДП-аналогу.
Замечание. Как видно из рисунка (а-и), все элементы матрицы Дразина обладают горизонтальными и вертикальными асимптотами. Картина вертикальных асимптот обычно наблюдается при определении различных однопараметрических обобщенных обратных матриц из за вырожденно-
зі
а 13i :*)
г
1
~ — /•
■6 -4 -2 0 2 4 6^
в/е
\ «ЛзС* 1
J
0
-2 -3
■4
-6
-6 -4 2 0 2 4 f
u/i
Рисунок.
). Поэтому для обеспечения большей точности вычислений при восстановлении соответствующих оригиналов-элементов матрицы Ав (£) были использованы обратные дифференциально-падеевские преобразования [18], положительные качества которых в рассматриваемом контексте достаточно хорошо известны [7]. Что же касается окончательного аналитиче-
ского представления Ав(1), здесь оно не приведено из-за его достаточно высокой сложности (громоздкости).
Заключение
Предложен численно-аналитический метод определения однопараметрических обобщенных обратных матриц Дразина, который легко реализуем средствами современных информационных технологий [20, 21]. Представленные сравнительные характеристики решения одного модельного примера показывают, что метод обладает высокой вычислительной эффективностью и малой погрешностью вычислений.
СПИСОК ЛИТЕРАТУРЫ
1.
Campbell S.L., Meyer C.D. Generalized Inverses of Linear Transformations. — Philadelphia: Society for Industrial and Applied Mathematics (SIAM), 2008. — 292 p.
2. Ben-Israel A., Greville T.N.E. Generalized Inverses: Theory and Applications. — NYC: Springer, 2003. — 435 p.
3. Светлаков А.А. Обобщенные обратные матрицы: некоторые вопросы теории и применения в задачах автоматизации управления процессами. — Томск: Изд-во НТЛ, 2003. — 388 с.
4. Универсальный метод определения параметрических обобщенных обратных матриц / С.О. Симонян, А.Г. Аветисян, А.С. Симонян, В.Р. Авинян // Вестник ГИУА. Сер. Информационные технологии, электроника, радиотехника. — 2012. -Вып. 15. — №2. — С. 9-19.
5. Бадалян Л.А. Разработка методов определения псевдообрат-ных нестационарных матриц и автоматизация вычислительных процедур: автореф.
дис. … канд. техн. наук. — Ереван, 2007. — 24 с.
6. Симонян С.О. Параллельные вычислительные методы определения параметрических обобщенных обратных матриц // Известия Томского политехнического университета. Сер. Управление, вычислительная техника и информатика. — 2013. -Т. 323. — №5. — С. 10-15.
7. Симонян С.О., Аветисян А.Г. Прикладная теория дифференциальных преобразований. — Ереван: Чартарагет, 2010. -361 с.
8. Lewis F.L., Vrabie D., Syrmos V.L. Optimal Control. 3rdedition. -Hoboken: Wiley, 2012. — 552 p.
9. Математическая теория оптимальных процессов / Л.С. Пон-трягин, В.Г. Болтянский, Р.В. Гамкрелидзе, Е.Ф. Мищенко. -М.: Наука, 1983. — 392 с.
10. Беклемишев Д.В. Дополнительные главы линейной алгебры.
-М.: Наука, 1983. — 335 с.
11. Гантмахер Ф.Р. Теория матриц. — М.: Физматлит, 2010. -5б0 с.
12. Yanai H., Takeuchi K., Takane Y. Projection Matrices, Generalized Inverse Matrices, and Singular Value Decomposition. — NYC: Springer, 2011. — 23б p.
13. Markov Chains: Models, Algorithms and Applications. 2nd edition / W.K. Ching, X. Huang, M.K. Ng, T.K. Siu. — NYC: Springer, 2013. — 243 p.
14. Schroers B.J. Ordinary Differential Equations: A Practical Guide. — Cambridge: Cambridge University Press, 2011. — 12В p.
15. Williams G. Linear Algebra with Applications. 7th edition. — Burlington: Jones & Bartlett Learning, 2009. — 532 p.
16. Haghighi A.M., Mishev D.P. Difference and Differential Equations with Applications in Queuing Theory.
)-обобщенно-обратных матриц // Вестник ГИУА. Серия Информационные технологии, электроника, радиотехника. — 2013. — Вып. 1б. — № 2. — C. 33-42.
18. Пухов Г.Е. Дифференциальные преобразования функций и уравнений. — Киев: Наукова думка, 1984. — 420 с.
19. Симонян С.О., Тамазян М.Д. Д-аналог L(t)U(t) разложения для обращения неавтономных матриц // Вестник ГИУА. Серия Информационные технологии, электроника, радиотехника. —
2012. — Вып. 15. — № 1. — С. 35-41.
20. Stroustrup B. The C++ Programming Language. 4th edition. — Boston: Addison-Wesley Professional, 2013. — 13бВ p.
21. The MathWorks, Inc., MATLAB The language of technical programming. Using MATLAB Graphics, Version 7.
Поступила 21.
06.2014 г.
UDC 621.52+511.52
D-ANALOGUE OF AN ALGORITHM FOR DETERMINING SINGLE-PARAMETRIC DRAZIN GENERALIZED INVERSE MATRIX BASED ON MATRIX FULL RANK FACTORIZATION
Hamlet A. Aslanyan,
State Engineering University of Armenia (Polytechnic), 105, Teryan street, Yerevan, 0009, Armenia. E-mail: [email protected]
Sargis H. Simonyan,
Dr. Sc., State Engineering University of Armenia (Polytechnic), 105, Teryan street, Yerevan, 0009, Armenia. E-mail: [email protected]
The urgency of the research is caused by the wide application of Drazin generalized inverse matrix in the theory of finite Markov chains, in solving linear shifting system of differential equations, difference equations, problems of optimal control of dynamic systems; in several aspects of automated control systems, etc.
The main aim of the study is to develop an algorithm for finding matrix discretes of single-parametric Drazin generalized inverse matrix in the field of differential transformations and restoring the original using reverse D-transformations.
The methods used in the study: theory of numerical Drazin pseudoinverse matrices, theory of generalized parametric inverse matrices, matrix full rank factorization, direct and reverse differential transformations, linear transformations of vector space, linear algebra, numerical calculations of matrix discretes using MATLAB ver. R2011b software package.
The results: The paper introduces rather simple numerical-analytical method for determining Drazin single-parametric generalized inverse matrix which can be easily implemented by means of contemporary information technologies. The illustration of the method by a single sample example for determining a special case of Drazin generalized inverse matrix — group inverse matrix, proved its computational efficiency and low computational error ratio.
Key words:
Single-parametric Drazin generalized inverse matrix, full rank factorization of the matrix, differential transformations, information technologies.
REFERENCES
1. Campbell S.L., Meyer C.D. Generalized Inverses of Linear Transformations. Philadelphia, Society for Industrial and Applied Mathematics (SIAM), 2008. 292 p.
2. Ben-Israel A., Greville T.N.E. Generalized Inverses: Theory and Applications. NYC, Springer, 2003. 435 p.
3. Svetlakov A.A. Obobshchennye obratnye matritsy: nekotorye vo-prosy teorii i primeneniya v zadachakh avtomatizatsii upravleni-ya protsessami [Generalized inverse matrices: several aspects of the theory and its application in problems of process control automation].
Tomsk, nTL Publ., 2003. 388 p.
4. Simonyan S.H., Avetisyan A.G., Simonyan A.S., Avinyan V.R. Universalny metod opredeleniya parametricheskikh obobshchen-nykh obratnykh matrits [Universal Method for Determining Mo-ore-Penrouse’s Parametric Generalized Inverse Matrices]. Vest-nik GIUA. Seriya informatsionnye tekhnologii, elektronika, ra-diotekhnika — Proceedings of State Engineering University of Armenia. Series Information Technologies, Electronics, Radio Engineering, 2012, Iss. 15, no. 2, pp. 9-19.
5. Badalyan L.A. Razrabotka metodov opredeleniya psevdoobrat-nykh nestatsionarnykh matrits i avtomatizatsiya vychislitelnykh protsedur. Avtoreferat diss. kand. tekhn. nauk [Development of methods to determine pseudoinverse nonsteady matrices and computer procedure automation. Cand. Diss. Abstract]. Yerevan, 2007. 24 p.
6. Simonyan S.
H. Parallelnye vychislitelnye metody opredeleniya parametricheskikh obobshchennykh obratnykh matrits [Parallel Computing Methods to Determine Parametric Generalized Inverse Matrices]. BulleAin of the Tomsk Polytechnic University, 2013, vol. 323, no. 5, pp. 10-15
7. Simonyan S.H., Avetisyan A.G. Prikladnaya teoriya defferentsi-alnykh preobrazovany [Applied Theory of Differential Transforms]. Yerevan, Chartaraget Publ., 2010. 3б1 p.
8. Lewis F.L., Vrabie D., Syrmos V.L. Optimal Control. Hoboken, Wiley, 2012. 3rd ed., 552 p.
9. Pontryagin L.S., Boltyanskiy V.G., Gamkrelidze R.V., Mishchenko E.F. Matematicheskaya teoriya optimalnykh protsessov [Mathematical Theory of Optimal Processes]. Moscow, Nauka Publ., 1983. 392 p.
10. Beklemishev D.V. Dopolnitelnye glavy lineynoy algebry [Additional Chapters of Linear Algebra].
Moscow, Nauka Publ., 1983. 335 p.
11. Gantmakher F.R. Teoriya Matrits [Matrix Theory]. Мoscow, Fiz-matlit Publ., 2010. 5б0 p.
12. Yanai H., Takeuchi K., Takane Y. Projection Matrices, Generalized Inverse Matrices, and Singular Value Decomposition. NYC, Springer, 2011. 23б p.
13. Ching W.K., Huang X., Ng M.K., Siu T.K. Markov Chains: Models, Algorithms and Applications. NYC, Springer, 2013. 2d ed., 243 p.
14. Schroers B.J. Ordinary Differential Equations: A Practical Guide. Cambridge, Cambridge University Press, 2011. 128 p.
15. Williams G. Linear Algebra with Applications. Burlington, Jones & Bartlett Learning, 2009. 7th ed., 532 p.
16. Haghighi A.
M., Mishev D.P. Difference and Differential Equations with Applications in Queueing Theory. Hoboken, Wiley,
2013. 424 p.
17. Simonyan S.H., Aslanyan H.A. Metod opredeleniya paramet-richeskikh (B)-i(Q)-obobshchenno-obratnykh matrits [Method For Determining (B)- and (Q)-Types of Parametric Generalized Inverses]. Vestnik GIUA. Seriya informatsionnye tekhnologii, elektroni-ka, radiotekhnika — Proceedings of State Engineering University of Armenia. Series Information Technologies, Electronics, Radio Engineering, 2013, Iss. 1б, no. 2, pp. 33-42.
18. Pukhov G.E. Differentsialnyepreobrazovaniya funktsiy i uravne-niy [Differential transformations of functions and equations]. Kiev, Naukova dumka Publ., 1984. 420 p.
19. Simonyan S.H., Tamazyan M.J. D-analog L(t)U(t) razlozheniya dlya obrashcheniya neavtonomnykh matrits [D-Analogue of L(t) U(t) for Inversion of Nonautonomous Matrices].
Vestnik GIUA. Seriya informatsionnye tekhnologii, elektronika, radiotekhnika -Proceedings of State Engineering University of Armenia. Series Information Technologies, Electronics, Radio Engineering, 2012, Iss. 15, no. 1, pp. 35-41.
20. Stroustrup B. The C++ Programming Language. Boston, Addi-son-Wesley Professional, 2013. 4th ed., 13б8 p.
21. The MathWorks, Inc., MATLAB The language of technical programming. Using MATLAB Graphics, Version 7.
Received: 21 June 2014.
Д-аналог метода определения однопараметрической обобщенной обратной матрицы Дразина, основанный на скелетном разложении матрицы
Том 325 № 2 (2014): Математика, физика и механика
Актуальность работы обусловлена широким применением обобщенной обратной матрицы Дразина в теории конечных цепей Маркова, в решении нестационарных линейных систем дифференциальных уравнений, при решении рекуррентных уравнений и задач оптимального управления динамическими системами, при различных вопросах систем автоматического управления и др.
Цель исследования: разработка алгоритма нахождения матричных дискрет однопараметрической обобщенной обратной матрицы Дразина в области дифференциальных преобразований и восстановления оригинала с помощью обратных Д-преобразований. Методы исследования: теория псевдообратных численных матриц Дразина, теория обобщенных обратных параметрических матриц, скелетное разложение матрицы, прямые и обратные дифференциальные преобразования, линейные преобразования линейного пространства, линейная алгебра, численные расчеты матричных дискрет с использованием программного пакета MATLAB ver. R2011b. Результаты: Представлен достаточно простой численно-аналитический метод определения однопараметрической обобщенной обратной матрицы Дразина, основанный на прямых и обратных дифференциальных преобразованиях, который легко реализуем средствами современных информационных технологий. Иллюстрация этого метода на одном модельном примере вычисления частного случая обобщенной обратной матрицы Дразина — групповой обратной матрицы, показала его высокую вычислительную эффективность и малую погрешность вычислений.
Ключевые слова:
матрицы, обратная матрица Дразина, скелетное разложение, индексы, дифференциальные преобразования, информационные технологии
Авторы:
Гамлет Арменович Асланян
Саргис Оганесович Симонян
Скачать bulletin_tpu-2014-325-2-04.pdfСистема математических расчетов MATLAB (стр. 7 из 30)
Если вы попытаетесь использовать элемент, находящийся вне размеров матрицы, это приве-дет к сообщению об ошибке
t = F (4,5)
Index exceeds matrix dimensions(Индекс превышает размерность матрицы)
С другой стороны, если вы попытаетесь запомнить какое-либо число вне размеров матрицы, размер будет соответствующим образом увеличен увеличен, чтобы принять новое значение.
X = A;
X(4,5) = 17
X =
16 3 2 13 0
5 0 11 8 0
9 6 7 12 0
4 15 14 1 17
Двоеточие, : , является одним из наиболее важных операторов MATLAB-а. Оно встречается в нескольких разных формах. Выражение 1:10 есть вектор-строка, содержащий целвые числа от 1 до 10:
1 2 3 4 5 6 7 8 9 10
Чтобы получить неединичное приращение, нужно задать приращение. Например,
100 : -7 : 50
есть
100 93 86 79 72 65 58 51
а
0 : pi/4 : pi
есть
0 0.7854 1.5708 2.3562 3.1416
Индексы, содержащие двоеточия, допускают обращение к частям матриц. Так, выражение
F (1:k, j)
дает первые k элементов j-го столбца матрицы F. То есть,
sum(F (1:4, 4))
вычисляет, как и в примере выше, сумму элементов 4-го столбца. Но есть еще лучший путь.
Двоеточие само по себе означает обращение ко всем элементам строки или столбца матрицы, а зарезервированное слово end есть обращение к последним строке или столбцу матрицы (в случае векторов-строк или столбцов слово end есть обращение к последнему элементу векто-ра). Значит,
sum(F (:, end))
вычисляет сумму элементов последнего столбца матрицы F . Ответ: ans = 34. Почему маги-ческая сумма для волшебного квадрата 4 х 4 равна 34 ? Дело в том, что если целые числа от 1 до 16 (число элементов матрицы размера 4 х 4) упорядочены в четыре группы с равными сум-мами элементов, эта сумма должна быть равна
sum(1:16)/4
что, конечно, дает ans = 34.
Единичная матрица, нулевая матрицы и матрица из единиц.
Двумерные массивы случайных чисел
Единичная матрица, то есть матрица имеющая единицы на главной диагонали и нулевые ос-тальные элементы, в MATLAB-е обозначается eye, причем eye(n) есть единичная квадратная матрица размера nxn, eye(m,n) — прямоугольная единичная матрица размера mxn, а eye(size(A)) есть единичная матрица, имеющая размерность матрицы A.
Например,
I = eye(3)
I =
1 0 0
0 1 0
0 0 1
I = eye (3,5)
I =
1 0 0 0 0
0 1 0 0 0
0 0 1 0 0
I = eye (4,2)
I =
1 0
0 1
0 0
0 0
Нулевая матрица, то есть матрица состоящая из нулей (массив нулей), в MATLAB-е обоз-начается zeros, причем zeros (n) есть нулевая квадратная матрица размера nxn, zeros (m,n) — прямоугольная нулевая матрица размера mxn, а zeros (size(A)) есть нулевая матрица имею-щая размерность матрицы A.
Z = zeros(2,4)
Z =
0 0 0 0
0 0 0 0
Наконец, матрица состоящая из единиц (массив единиц), в MATLAB-е обозначается ones, причем ones (n) есть квадратный массив единиц размера nxn, ones (m,n) – прямоугольный массив единиц размера mxn, а ones (size(A)) есть массив единиц, имеющий размерность матрицы A.

S = 5*ones(3, 3)
S =
5 5 5
5 5 5
5 5 5
Аналогично, функция rand дает возможность сформировать соответствующие массивы слу-чайных чисел в диапазоне от 0 до 1, распределенных по равномерному закону, а функция randn – по нормальному закону.
N = fix(10*rand(1,10))
N =
4 9 4 4 8 5 2 6 8 0
R = randn(4,4)
R =
1.0668 0.2944 -0.6918 -1.4410
0.0593 -1.3362 0.8580 0.5711
-0.0956 0.7143 1.2540 -0.3999
-0.8323 1.6236 -1.5937 0.6900
Одной из важнейших задач в технических приложениях и расчетах является задача решения систем линейных уравнений. В матричных обозначениях, данная задача может быть сформу-лирована следующим образом. При заданных двух матрицах A and B, существует ли такая единственная матрица X, что AX = B или XA = B?
Для наглядности рассмотрим одномерный пример.
Имеет ли уравнение
7x = 21
единственное решение? Ответ, разумеется, да. Это уравнение имеет единственное решение x = 3. Решение может быть легко получено обычным делением.
x = 21/7 = 3
Решение при этом обычно не состоит в определении обратной величины от числа 7 (т.е. ве-личины 7-1 = 0.142857…), и последующим умножением числа 7-1 на число 21. Это было бы более трудоемко и, если число 7-1 представлено конечным числом цифр (разрядов), менее точно. Аналогичные рассуждения применимы и к системам линейных алгебраических уравнений с более чем одной неизвестной; MATLAB решает такие уравнения без вычисле-ния обратной матрицы. Хотя это и не является стандартным математическим обозначением, система MATLAB использует терминологию, связанную с обычным делением в одномерном случае, для описания общего случая решения совместной системы нескольких линейных уравнений. Два символа деления / (косая черта (по английски — slash)) и \ (обратная косая че-рта (backslash)) используются в двух случаях, когда неизвестная матрица появляется слева или справа от матрицы коэффициентов:
X = A\B обозначает решение матричного уравнения AX = B
X = B/A обозначает решение матричного уравнения XA = B.
Вы можете представлять себе это как процесс «деления» обеих частей уравнения AX = B или XA = B на A. Матрица коэффициентов A всегда находится в «знаменателе».Условие сов-местимости размерностей для X = A\B требует чтобы две матрицы A и B имели одинаковое число строк. Решение X тогда имеет такое же число столбцов как и B, а число ее строк будет равно числу столбцов A. Для X = B/A, строки и столбцы меняются ролями. На практике, ли-нейные уравнения в виде AX = B встречаются более часто, чем в виде XA = B. Следователь-но, обратная наклонная черта \ используется более часто, чем прямая / . Поэтому, в остав-шейся части данного раздела мы ограничимся рассмотрением оператора \ ; соответствующие свойства оператора / можно вывести из тождества
(B/A)’ = (A’\B’)
В общем случае не требуется, чтобы матрица коэффициентов A была бы квадратной.
Если A имеет размер mхn, то возможны три случая:
- m = n Квадратная система. Ищется точное решение.
- m > n Переопределенная система. Ищется решение методом наименьших квадратов.
- m < n Недоопределенная система. Находится базовое решение с самым большим
числом m ненулевых компонент.
Оператор \ использует различные алгоритмы для решения систем линейных уравнений с раз-ными типами матриц коэффициентов. Различные случаи, которые диагностируются автома-тически по типу матрицы коэффициентов, включают:
• Перестановки треугольных матриц
• Симметричные, положительно определенные матрицы
• Квадратные невырожденные матрицы
• Прямоугольные, переопределенные системы
• Прямоугольные, недоопределенные системы
Квадратные системы
Наиболее часто встречающейся ситуацией является квадратная матрица коэффициентов A и одномерный вектор-столбец b справа, т.
е. Ax = b. Решение x = A\b имеет при этом тот же ра-змер, что и вектор b. Например,
x = A\u
x =
10
-12
5
где матрица А есть приведенная выше матрица Паскаля. Легко удостовериться, что A*x в точности равно вектору u (численные значения этого вектора даны выше).
Если A и B являются квадратными и имеют одинаковый размер, то X = A\B имеет тот же ра-змер, например
X = A\B
X =
19 -3 -1
-17 4 13
6 0 -6
Легко убедиться, что A*X в точности равно B.
Оба этих примера имеют точное решение в виде целых чисел. Это связано с тем, что в каче-стве матрицы коэффициентов была выбрана матрица Паскаля pascal(3), чей детерминант равен единице. Далее будут рассмотрены примеры влияния ошибок округления, возникаю-щих в более реальных системах.
Квадратная матрица A является сингулярной, если ее столбцы не являются линейно незави-симыми. Если A – сингулярна, то решение AX = B или не существует, или не является един-ственным. Оператор \ , A\B, выдает предупреждающее сообщение, если матрица A близка к сингулярной и сообщение об ошибке, если определено равенство нулю детерминанта матри-цы А.
Переопределенные системы
Переопределенные системы совместных линейных уравнений часто встречаются в задачах аппроксимации экспериментальных данных при помощи различных эмпирических кривых. Рассмотрим следующий гипотетический пример. Величина y измеряется при различных зна-чениях времени t, что дает следующие результаты
t y
0.0 0.82
0.3 0.72
0.8 0.63
1.1 0.60
1.6 0.55
2.3 0.50
Эти данные могут быть введены в MATLAB при помощи выражений:
t = [0 .
3 .8 1.1 1.6 2.3]’;
y = [0.82 0.72 0.63 0.60 0.55 0.50]’;
Простейшие вычисления MathCAD
Обозначают векторное произведение символом х, который можно ввести нажатием кнопки Cross Product (Векторное произведение) в панели Matrix (Матрица) или сочетанием клавиш +.
· Обратная матрица
Поиск обратной матрицы возможен, если матрица квадратная, и ее определитель не равен нулю. Произведение исходной матрицы на обратную по определению является единичной матрицей. Для ввода оператора поиска обратной матрицы, нажмите кнопку Inverse (Обратная матрица)на панели инструментов Matrix (Матрица).· Возведение матрицы в степень
К квадратным матрицам можно формально применять операцию возведения в степень n. Для этого n должно быть целым числом. Ввести оператор возведения матрицы M в степень n можно точно так же, как и для скалярной величины: нажав кнопку Raiseto Power (Возвести в степень) на панели Calculator (Калькулятор) или нажав клавишу .После появления местозаполнителя в него следует ввести значение степени.
· Векторизация массивов
Векторная алгебра MathCAD включает несколько необычный оператор, который называется оператором векторизации (vectorize operator). Этот оператор предназначен, как правило, для работы с массивами. Он позволяет провести однотипную операцию над всеми элементами массива (т. е. матрицы или вектора), упрощая тем самым программирование циклов. Например, иногда требуется умножить каждый элемент одного вектора на соответствующий элемент другого вектора. Непосредственно такой операции в MathCAD нет,но ее легко осуществить с помощью векторизации. Для этого:
1. Введите векторное выражение, как показано во второй строчке листинга(обратите внимание, что в таком виде символ умножения обозначает оператор скалярного произведения векторов).
2. Переместите курсор таким образом, чтобы линии ввода выделяли все выражение, которое требуется подвергнуть векторизации.
3.Введите оператор векторизации, нажав кнопку Vectorize (Векторизация) на панели Matrix (Матрица), или сочетанием клавиш +.
Создание, транспонирование, извлечение, умножение матриц
MATLAB Fast Automation: Устали работать? Вот ваш пошаговый план действий по автоматизации вашей работы с MATLAB.
В этой статье объясняются ключевые моменты манипулирования матрицами MATLAB при запуске. В частности, вы научитесь:
- Создать матрицу
- Определить матрицу
- Получить размеры матрицы
- Инвертировать, транспонировать и извлекать элементы из матрицы и создавать единичную матрицу
- Транспонировать матрицу
- Инверсия матрицы
- Определите единичную матрицу
- Извлечь данные из матрицы
- Умножение матриц
- Квадратная матрица
- Неквадратная матрица
- Умножение матриц элемент на элемент
Создайте матрицу в MATLAB
Определить матрицу
Начнем с определения матриц.
Первое, что нужно знать, это то, что вы можете разделять строки точкой с запятой (;) и что вы определяете строки, просто помещая элементы рядом друг с другом. Затем используйте квадратные скобки, чтобы отметить начало и конец вашей матрицы. Например, у вас есть следующая матрица:
\ (m = \ begin {pmatrix} 1 & 2 \\ 3 & 4 \ end {pmatrix} \)
Вы можете определить это как следующее в Matlab:
Размеры матрицы
Вы можете найти размер матрицы с помощью команды MATLAB size .Вы можете определить количество строк и количество столбцов вашей матрицы следующим образом:
numberOfRows = размер (м, 1); numberOfColumns = размер (м, 2);в MATLAB, получаем:
Матрица MATLAB: инверсия, транспонирование и матрица идентичности и извлечение элементов
Транспонирование функции MATLAB
- Матрица транспонирования: вы можете использовать функцию транспонирования в MATLAB, добавив одиночную кавычку в конце вашей матрицы:
м = [1 2; 3 4]; mTranspose = m ';В MATLAB получаем
- Транспонировать вектор: его можно использовать для преобразования вектора-строки в вектор-столбец следующим образом:
columnVector = rowVector '; % преобразовать вектор-строку в вектор-столбецВ этой статье мы сосредоточимся на матрицах в MATLAB, поэтому мы не будем вдаваться в подробности о векторах.
Если вы хотите узнать больше о векторах, см .: MATLAB Vector Tutorial: Create, Add, Concatenate and Extract
Обратная функция MATLAB
Вы можете инвертировать матрицу с помощью команды inv MATLAB:
м = [1 2; 3 4]; mInverse = inv (m);По определению, если мы умножим эти две матрицы, мы должны получить единичную матрицу:
Матрица идентичности в MATLAB
Вы можете определить единичную матрицу с помощью функции MATLAB eye .Например, если вы хотите иметь тождество матричной функции из трех столбцов и трех строк (\ (I_3 \)), вы можете написать:
identityMatrix = глаз (3); % единичная квадратная матрица 3x3Извлечение данных из матрицы
Иногда вам нужно извлечь строку или столбец из матрицы. Допустим, у вас есть следующая матрица:
\ (A = \ begin {pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \ end {pmatrix} \)
Определено в MATLAB следующим образом:
А = [1 2 3; 4 5 6; 7 8 9];
- Извлечь столбец из матрицы: Например, если у вас есть матрица с тремя столбцами и вам нужен второй столбец, вы можете сделать следующее:
C = A (:, 2)% выбрать все строки (:) и только второй столбец (2)В MATLAB получаем
Умножение матриц в MATLAB
Умножение матриц в MATLAB: Квадратная матрица
- Код для умножения матриц: вы можете умножать матрицы в MATLAB, используя следующее:
A * B% классическое матричное умножение в MATLAB- Пример умножения матриц: , если у нас есть эти матрицы:
\ (A = \ begin {pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \ end {pmatrix} ~~~~~~ и ~~~~~~ B = \ begin {pmatrix} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 2 \ end {pmatrix} \)
Умножим их в MATLAB:
А = [1 2 3; 4 5 6; 7 8 9]; B = [2 0 0; 0 2 0; 0 0 2]; % = 2 * identityMatrix А * ВЗатем в MATLAB мы получаем
- Интерпретация: согласно MATLAB, AB = 2A.
Это имеет смысл, поскольку
\ (B = \ begin {pmatrix} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 2 \ end {pmatrix} = 2I_3 \ подразумевает A \ times B = A \ times 2I_3 = 2 \ раз A \)
Умножение матриц на векторы и неквадратные матрицы
- Напоминание: вы также можете умножать неквадратные матрицы друг на друга (например, матрицу на вектор). Если вы умножите матрицу P размеров (m x n) на матрицу V размеров (n x p), вы получите матрицу размеров (m x p).
- Пример неквадратного умножения матриц: предположим, что у вас есть следующие матрицы:
\ (P = \ begin {pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \ end {pmatrix} ~~~~~~ И ~~~~~~ V = \ begin {pmatrix} 1 \\ 2 \\ 3 \ end {pmatrix} \)
Тогда P * V будет
\ (P \ times V = \ begin {pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \ end {pmatrix} \ begin {pmatrix} 1 \\ 2 \\ 3 \ end {pmatrix} = \ begin {pmatrix} 1 \ times 1 +2 \ times 2 + 3 \ times 3 \\ 4 \ times 1 + 5 \ times 2 + 6 \ times 3 \ end {pmatrix} = \ begin {pmatrix} 14 \\ 32 \ end {pmatrix} \)
- Неквадратное матричное умножение в MATLAB: давайте попробуем:
P = [1 2 3; 4 5 6]; % P - матрица (2x3) V = [1; 2; 3]; % V - неквадратная матрица (или вектор) размером 3x1 P * VМы получаем
Так как P — это матрица (2 × 3), а V — матрица (3 × 1), P * V — это матрица (2 × 1).Умножение матриц на элементы
- Напоминание: вы также можете перемножать матрицы поэлементно. Давайте посмотрим, как это работает на примере A и B:
\ (A = \ begin {pmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \ end {pmatrix} ~~~~~~ и ~~~~~~ B = \ begin {pmatrix} 2 & 0 & 0 \\ 0 & 2 & 0 \\ 0 & 0 & 2 \ end {pmatrix} \)
Каждый элемент матрицы A умножается на соответствующий элемент в матрице B.В нашем примере у нас будет:
\ (\ begin {pmatrix} 1 \ times 2 & 2 \ times 0 & 3 \ times 0 \\ 4 \ times 0 & 5 \ times 2 & 6 \ times 0 \\ 7 \ times 0 & 8 \ times 0 & 9 \ times 2 \ end {pmatrix} = \ begin {pmatrix} 2 & 0 & 0 \\ 0 & 10 & 0 \\ 0 & 0 & 18 \ end {pmatrix} \)
, что означает, что перемножаемые матрицы должны быть одинакового размера.
- Матричное умножение MATLAB элемент за элементом: поэлементное матричное умножение A на B будет:
А = [1 2 3; 4 5 6; 7 8 9]; B = [2 0 0; 0 2 0; 0 0 2]; % = 2 * identityMatrix А.* B
Получаем
Ключевые выносы:
- Создайте матрицу, используя следующее:
м = [1 2; 3 4]; % разделяют столбцы пробелом и строки точкой с запятой- Получите размеры матрицы, используя:
размер (м, 1)% количество строк размер (м, 2)% количество колонн- Матрица MATLAB: транспонированная, обратная и единичная матрица:
м = [1 2; 3 4]; mTranspose = m '; % транспонировать матрицу mInverse = inv (m); % обратная матрица identityMatrix = глаз (п); % единичной квадратной матрицы (nxn)- Извлечь данные из матрицы:
А = [1 2 3; 4 5 6; 7 8 9]; C = A (:, 2)% выбрать все строки (:) и только второй столбец (2) R = A (2, :)% выберите только вторую строку (2) и все столбцы (:) smallMatrix = A (1: 2, 1: 2); A (2,:) = []; % удалить вторую строку A (:, 2) = []; % удалить второй столбец- Умножьте матрицу: используя A * B или A.
* B для поэлементного умножения:
A * B% классического умножения матриц A. * B% элемент умножением элементной матрицыИнверсная матрица — обзор
1.2 Метод наименьших квадратов и обобщенные решения
Проблема восстановления или реконструкции изображения может рассматриваться как эквивалентная решению для неизвестного вектора f с учетом знания вектора данных g и искажающая системная матрица H. На первый взгляд может показаться, что простая обратная матрица дает решение, но этот подход не приводит к пригодным для использования решениям. Есть четыре основных вопроса, которые необходимо решить при инвертировании эффектов H , чтобы получить оценку f ˆ f. Во-первых, это проблема существования решения. Учитывая наблюдение g в (7), может не существовать какой-либо f , который решает это уравнение с равенством из-за присутствия шума. Во-вторых, проблема единственности решения.
Если нулевое пространство H непусто, значит, в данных есть объекты или изображения, которые «не наблюдаются». Нулевое пространство H — это совокупность всех входных изображений, которые производят нулевой вывод.
Примером может служить набор DC или постоянных изображений, когда H является фильтром верхних частот. Такие компоненты могут существовать в реальной сцене, но не появляются в наблюдениях. В этих случаях будет много вариантов выбора из f , которые производят тот же набор наблюдений, и необходимо решить, какой из них является «правильным».Такая ситуация возникает, например, когда H представляет фильтр, величина которого стремится к нулю для некоторого диапазона частот, и в этом случае изображения, отличающиеся в этих диапазонах, будут давать идентичные наблюдения. В-третьих, проблема устойчивости решения. Желательно, чтобы оценка f оставалась относительно неизменной перед лицом возмущений в наблюдениях (либо из-за шума, неопределенности или числового округления).
Эти первые три элемента составляют основу классического определения некорректной задачи Адамара [4, 5].Помимо этих проблем, существует еще одна проблема. Уравнение (7) представляет только наблюдения и ничего не говорит о каких-либо предварительных знаниях о решении. Как правило, будет доступно больше информации, и потребуется способ включить ее в решение. Регуляризация окажется средством решения всех этих проблем.
Стандартный подход к инвертированию (7) теперь будет рассмотрен, а его недостатки объяснены в контексте вышеизложенного обсуждения. Типичное (и разумное) решение первой проблемы существования решения состоит в том, чтобы найти решение методом наименьших квадратов для набора несовместимых уравнений, представленных формулой (7).То есть оценка определяется методом наименьших квадратов для наблюдаемых данных:
(11) fˆ1s = argminf‖g − Hf‖22
, где ‖z‖22 = ∑izi2 обозначает l 2 -norm и arg обозначают аргумент, производящий минимум (в отличие от самого значения минимума).
Взвешенная норма ошибки также иногда используется в спецификации (11), чтобы придать некоторым наблюдениям повышенную важность в решении: ‖g − Hf‖W2 = ∑iwi [g − Hf] i2. Если H имеет полный ранг столбца, нулевое пространство H пусто, а оценка уникальна и получается как решение следующего набора нормальных уравнений [4]:
(12) (HTH) fˆls = HTg.
Когда нулевое пространство H не пусто, необходимо также учитывать вторую трудность инверсии неединственности, вызванную наличием ненаблюдаемых изображений. В таких ситуациях обычно ищут уникальное решение с минимальной энергией или нормой среди набора решений методом наименьших квадратов. Это обобщенное решение обычно обозначается fˆ + и определяется как:
(13) fˆ + = argmin‖f‖2subject tomin‖g − Hf‖2.
Обобщенное решение часто выражается как fˆ + = H + g, где H + называется обобщенной обратной величиной H (обратите внимание, что H + определяется неявно через (13)).
Таким образом, обобщенные решения являются решениями наименьших квадратов минимального размера или энергии. Поскольку компоненты решения f , которые не наблюдаются, не улучшают соответствие данным, а служат только для увеличения энергии решения, обобщенное решение соответствует решению методом наименьших квадратов без ненаблюдаемых компонентов, т. Е. Без компонента в нулевое пространство H. Обратите внимание, что когда нулевое пространство H пусто (например, когда у нас есть по крайней мере столько же независимых наблюдений g i , сколько неизвестных f j ), обобщенное решение и решение методом наименьших квадратов одинаковы.
Чтобы понять, как работает обобщенное решение, рассмотрим простую ситуацию фильтрации, когда базовая PSF инвариантна к сдвигу (например, наша проблема удаления размытия), а соответствующий H является циркулянтной матрицей. В этом инвариантном к сдвигу контексте фильтрации метод обобщенного решения иногда называют «обратной фильтрацией» (см.
Главу 3.5). В этом случае H может быть диагонализовано матрицей F , которая выполняет двумерное дискретное преобразование Фурье (ДПФ) на изображении (представленном как вектор) [3].В частности, тильды обозначают величины преобразования:
(14) H = F − 1H˜F, HT = F − 1H˜ * F
, где H˜ — диагональная матрица, а H˜ * обозначает комплексное сопряжение матрицы H˜ . Диагональные элементы H˜ — это просто коэффициенты 2D DFT h˜i PSF этой циркулянтной задачи (diag [H˜] = h˜ = Fh, где h задается, например, первым столбцом H ). Применяя эти соотношения к (12), получаем следующую характеристику обобщенного решения в частотной области:
(15) H˜ * H˜f˜ + = H˜ * g˜
, где f˜ + — вектор Коэффициенты 2D DFT обобщенного решения, а g˜ — вектор коэффициентов 2D DFT данных.Эта система уравнений диагональна, поэтому каждый компонент решения может быть решен отдельно для:
(16) f˜i + = {(1h˜i) g˜i, | h˜i | ≠ 00, в противном случае
Таким образом , обобщенное решение выполняет простую обратную фильтрацию, когда величина частотной характеристики отлична от нуля, и устанавливает решение равным нулю в противном случае.
Для общих несверточных задач (например, для томографических задач) матрица 2D DFT F не обеспечивает диагонализационное разложение H , как в (14).Однако существует обобщение этой идеи на произвольные, изменяющиеся сдвигом системные матрицы PSF, называемые разложением по сингулярным значениям (SVD) [6]. SVD — важный инструмент для понимания и анализа обратных задач. SVD матрицы N g × N f H представляет собой разложение матрицы H следующего вида:
(17) H = USVT = ∑k = 1pσkukvkT
где U — это матрица N g × N g , V — это матрица N f × N f , а 5 — это матрица N g × N f диагональная матрица со значениями σ 1 , σ 2 ,…, σ p , расположенными на ее главной диагонали и нулями в другом месте, где p = min ( N g , N f ).
Ортонормированные столбцы u i из U называются левыми сингулярными векторами, ортонормированные столбцы v i из V называются правыми сингулярными векторами, σ i называются сингулярными векторами. сингулярных значений, а набор троек {σ i , u i , v i }, 1 ≤ i ≤ p называется сингулярной системой H. Далее, если r — ранг H , тогда σ i удовлетворяет:
(18) σ1≥ ⋯ ≥σr> σr + 1 = ⋯ = σp = 0.
Вычисление всего SVD слишком затратно с точки зрения вычислений для общих задач, размер которых превышает скромный, хотя понимание, которое оно дает, тем не менее, делает его полезным концептуальным инструментом. Однако можно эффективно рассчитать SVD для определенных структурированных задач (например, для задач с разделяемой PSF [3]) или рассчитать только части SVD для общих задач. Такие расчеты SVD могут быть выполнены численно надежным способом, и для этой цели существует множество программных инструментов.
SVD позволяет проводить анализ, аналогичный (16), для общих проблем. В частности, обобщенное решение может быть выражено через элементы SVD следующим образом:
(19) fˆ + = ∑i = 1ruiTgσivi.
Это выражение, действительное для любого H , независимо от того, сверточное оно или нет, можно интерпретировать следующим образом. Наблюдаемые данные g разлагаются относительно набора базовых изображений { u i } (давая коэффициенты u T i g ).Коэффициенты этого представления масштабируются на 1 / σ i , а затем используются в качестве весов расширения fˆ + по отношению к новому набору базовых изображений { v i }. Отметим, в частности, что сумма составляет всего р. Компоненты v i реконструкции для i> r соответствуют σ i = 0 и исключаются из решения. Эти компоненты точно соответствуют изображениям, которые не будут обнаружены в данных.
Например, если бы H был фильтром нижних частот, компоненты изображения постоянного тока были бы опущены из решения. Обратите внимание, что для линейной задачи, инвариантной к сдвигу, где применимы методы частотной области, решение (19) эквивалентно инвертированию частотной характеристики системы на тех частотах, где она отлична от нуля, и установке решения на ноль на тех частотах, где он равен нулю, как обсуждалось ранее.
Обратная комплексная матрица — iTecTec
>> M = magic (6)
M =
35 1 6 26 19 24
3 32 7 21 23 25
31 9 2 22 27 20
8 28 33 17 10 15
30 5 34 12 14 16
4 36 29 13 18 11
>> iM = inv (M)
Предупреждение: матрица близка к сингулярной или плохо масштабирована.Результаты могут быть неточными. RCOND = 8.001607e-19.
IM =1.0e + 15 *
2,251799813685250 -0,000000000000000 -2,251799813685250 -2,251799813685250 -0,000000000000000 2,251799813685250
2,251799813685250 -0,000000000000000 -2,251799813685250 -2,251799813685250 -0,000000000000000 2,251799813685250
-1,125899
2625 0,000000000000000 1,1258992625 1,1258992625 0,000000000000000 -1,1258992625-2.
251799813685250 0,000000000000000 2,251799813685250 2,251799813685250 0,000000000000000 -2,251799813685250
-2,251799813685250 0,000000000000000 2,251799813685250 2,251799813685250 0,000000000000000 -2,251799813685250
1,125899
2624 0 -1,1258992624 -1,1258992624 0 1,1258992624>> М *
мкМ ANS =
-8,000000000000000 0 8,000000000000000 8.000000000000000 -1,125000000000000 0
0 0 0 1,000000000000000 -0,962843041164940 0,500000000000000
8,000000000000000 -0,000000000000001 -8,000000000000000 -8,000000000000000 -1,773627835340241 8,000000000000000
8,000000000000000 0 -8,000000000000000 -8,000000000000000 0,2493524222 +12,000000000000000
4,000000000000000 0,000000000000000 -4.000000000000000 -4.000000000000000 0.411509381125735 12.000000000000000
8.000000000000000 0-8.000000000000000 -8.000000000000000 -0.399275413049567 20.000000000000000
>> iM * M
4000 4000 0
0
0
0
0
0 2-2-1 2 1
2 8 6 0 8 6
0-4-9-2 0 0
0 0 0 0 0 0
>> cond (M)
ans =
4.
{- 1} $ и может быть вычислена несколькими способами.{-1} = \ left (\ begin {bmatrix} \ frac {e if h} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {c hb i} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {b fc e} {- ce g + bf g + cd ha f hb d i + aei} \\ \ frac {f gd i} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {a ic g} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {c da f} {- ce g + bf g + cd ha f hb d i + aei} \\ \ frac {d he g} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {b ga h} {- ce g + bf g + cd ha f hb d i + aei} & \ frac {a eb d} {- ce g + bf g + cd ha f hb d i + aei} \ end {bmatrix} \ right) $$
Важно, чтобы определитель инвертируемой матрицы не был равен нулю, чтобы матрица была обратимой.
Как доказать обратимость матрицы?
Матрица обратима, если ее определитель не равен нулю (отличен от 0). Итак, чтобы доказать, что матрица имеет обратную, вычислите определитель матрицы, если он отличен от 0, то матрица обратима.
Необратимая матрица называется сингулярной (инверсия невозможна).
Избегайте неправильного термина обратимый .
Как инвертировать матрицу с нулевым определителем?
Матрица с определителем, равным 0, не обратима.{-1} = I $.
Как вычислить модульную обратную матрицу?
Задайте новый вопросИсходный код
dCode сохраняет за собой право собственности на исходный код онлайн-инструмента «Инверсия матрицы». За исключением явной лицензии с открытым исходным кодом (обозначенной CC / Creative Commons / free), любого алгоритма, апплета или фрагмента «Обратный матрице» (конвертер, решатель, шифрование / дешифрование, кодирование / декодирование, шифрование / дешифрование, переводчик) или любой другой Функция, обратная матрице (вычисление, преобразование, решение, дешифрование / шифрование, дешифрование / шифрование, декодирование / кодирование, перевод), написанная на любом информационном языке (Python, Java, PHP, C #, Javascript, Matlab и т. Д.)) и никакая загрузка данных, скрипт, копипаст или доступ к API для «инверсии матрицы» не будут бесплатными, то же самое для автономного использования на ПК, планшете, iPhone или Android! dCode распространяется бесплатно и онлайн.
Нужна помощь?
Пожалуйста, посетите наше сообщество dCode Discord для запросов о помощи!
NB: для зашифрованных сообщений проверьте наш автоматический идентификатор шифра!Вопросы / Комментарии
Сводка
Похожие страницы
Поддержка
Форум / Справка
Ключевые слова
инверсия, матрица, квадрат, тождество, инверсия, обратимая, сингулярное число
Ссылки
Источник: https: // www.dcode.fr/matrix-inverse
© 2021 dCode — Идеальный «инструментарий» для решения любых игр / загадок / геокэшинга / CTF.Найдите команду обратной матрицы MATLAB и функцию моделирования с изображениями
Оглавление (щелкните для навигации)
Основы функции обратной матрицы: Краткое руководство
Что такое MATLAB R2018b?
MATLAB — это программное обеспечение для моделирования инструмент, используемый во всем мире миллионами ученых и инженеров для своих потребности в исследованиях, разработках и эксплуатации.
Если есть желание анализировать и проектировать научные и инженерные системы, MATLAB — идеальный инструмент для облегчения сложных математических преобразований, которые будут иметь решающее значение в ваши исследования и разработки перед фактической лабораторией и пилотом Выполнение проекта.
С мощным расчетом алгоритмы и удобный графический интерфейс, визуализация проект, чтобы облегчить понимание проекта, не выходя из рабочего стола или ноутбука обеспечивает подходящую среду для подробного анализа данных вашего проекта.Имея за плечами многолетний опыт работы в команде, вы можете гарантировать, что ваш проекты будут не только работами, которые могут быть проверены, но и теми, которые могут облегчить передачу остальной части вашей проектной команды с помощью возможностей MATLAB для интеграции с другими системами. Визуализация графического пользовательского интерфейса показано ниже:
Справа от экрана находится командное окно MATLAB, где в систему вводится соответствующий код инструкции, а слева — окончательный дисплей после того, как действие было выполнено системой.
O
Что в этой статье?
Матричные функции в экосистеме MATLAB
- Введение в инверсию Матричные функции
- Обратная матричная функция Основы: Краткое руководство
MATLAB — самая популярная матрица. пакеты вычислений на основе в научном и инженерном сообществе. С участием его переносимый язык, это выбор большинства образовательных и промышленных объекты в качестве основы для исследований и разработок проекта.С его массивным популярность, знание языка — это вложение, которое того стоит. Как это завоевал популярность MATLAB R2018b превратился не только в математический пакет, но также впечатляющий набор для моделирования. Сегодня мы рассмотрим некоторые основ работы с матричными функциями MATLAB R2018b, в том числе о том, как вычислять простая функция обратной матрицы.
Введение в матрицу ФункцииМатричные функции используются в жизни ученых и инженеры для облегчения множества вычислительных задач.
С участием приложения в нескольких разделах математики и естествознания, матрица функция помогает преобразовать физическую среду в математическую модели и, таким образом, облегчить цифровую трансформацию этой модели, позволяют аналитик, чтобы определить результат, а затем определить реальные последствия этого изменения.
Матричная математика используется в различных вычислениях в компьютерной графике, влияет на перспективы изображения на экранах и облегчает соответствующие настройки с точки зрения пользователя.В таких областях, как оптика, матрицы использовались для облегчения предсказания картин отражения и преломления.
Для тех, кто неравнодушен к электронике, есть подробные вычисления, которые используются для определения электрических цепей системы, вплоть до размера микрочипа. С помощью матричной технологии инженеры могут определить соответствующие системные свойства до того, как система будет построена. С соответствующими инструментами моделирования легко визуализировать электрическую систему, а также определить ее надежность перед внедрением в полевых условиях.
В деловом мире кванты зависят от статистики и вероятности для определения вероятности определенных событий и их финансовых подразумеваемое. В сфере здравоохранения с использованием личных данных определенная страховая премия расчеты могут быть определены. В финансовом секторе финансовые модели и инвестиционные портфели, а также инвестиционные операции могут определяться вычисление. Все эти вычисления основаны на векторе вероятности вычисления, которые требуют использования матричных вычислений, чтобы способствовать получению соответствующих предсказуемых результатов.
По сути, можно увидеть, что Матричная математика затрагивает нашу цифровая жизнь существует множеством способов. Они предоставляют средства, с помощью которых линейная алгебра вычисления можно значительно упростить.
Введение в матрицу АрифметикаМатематически матрица — это средство, с помощью которого набор числовых данных может быть организован и представлен упорядоченной строкой и столбцом переменных.
[2]
В виде матрицы «2 × 3» Наблюдатель может видеть, что матрица состоит из двух строк и трех столбцов.MATLAB использует эту базовую линию для некоторых детальных вычислений. Типы входных данных матрицы, которые могут быть сгенерированы в среде MATLAB: показано ниже:
Этот список никоим образом не исчерпывающий, и через систему поддержки MATLAB система укажет вам как лучше всего представить конкретные данные, которые вам понадобятся для вычисления ваших данных представительным образом.
Общие типы матриц вы встретите в своей карьере:
Матрица идентичности и Обратная матрица
- Квадратная матрица который содержит равное количество столбцов и строк
Важнейшим моментом в этом руководстве является введение единичной матрицы и обратной матрицы.Единичная матрица — это квадратная матрица размера nXn, на диагонали которой находятся единицы. Идентификационная матрица выделена ниже:
Использование этой матрицы в качестве множитель, эффект аналогичен умножению его дополнительной матрицы на один.
В случае обратного матрица, если есть две матрицы, которые умножают друг друга, чтобы получить матрицу выше, они противоположны друг другу. Численно это изображается двумя матрицы A и B, такие что AB = I n . B идентифицируется как обратная матрица A и обозначается как A -1 .
Выводы о матричных приложенияхПредыдущие параграфы познакомили вас с функциями, которые матричная математика играет в нашей повседневной жизни. Различные области науки интегрированы, чтобы способствовать появлению цифрового моделирования, чтобы снизить стоимость экспериментов, а также увеличить вариативность экспериментов, которые могут быть предприняты учеными, инженерами и математиками.
Имея возможность моделировать физическая среда вокруг них, и выражая данные в виде матриц, преобразования, необходимые для моделирования реального изменения окружающей среды, могут быть легко вычислено.Сегодняшнее руководство познакомит вас с некоторыми из этих преобразований.
Определение обратной матрицы в среде MATLAB R2018bГрафический пользователь MATLAB Интерфейс разработан для удобного вычисления математических представлений физический мир. Общий графический интерфейс пользователя показан ниже:
MATLAB часто достигается через один из двух основных способов: через организационную лицензию или индивидуальную лицензию. Если ты аффилированная с такой организацией, как университет или промышленная компания, ИТ-пакеты позволят получить несколько лицензий, доступных для организационные пользователи.С единой системой идентификации доступа через соответствующие порталы, пользователи могут найти ссылку для доступа к MATLAB R2018b. Для индивидуальные пользователи, есть возможность приобрести систему через их веб-сайт: https://www.mathworks.com/
После того, как доступ был предоставлено, предыдущее изображение — это то, что пользователь увидит, когда будет перемещаться по Графический интерфейс пользователя (GUI).
Интуитивно понятные элементы графического интерфейса включают:
- Интерактивный лента в верхней части страницы, содержащая различные системные функции
- Командное окно справа от экрана.В этой среде будет находиться системный код. введен в систему. Подобно командной строке в любой операционной системе, этот аспект MATLAB — это то место, где будет введен критический системный код, в чтобы облегчить фоновые программные алгоритмы для вычисления желаемого задачи,
- Окна отображения слева от экрана. Как графическая система, если пользователь того пожелает. система сможет отображать желаемый математический функция, которая будет отображаться.Для таких функций, как подсчет населения плотности и другие трехмерные функции, мощность среды MATLAB равна легко ощущается в результате вычислений.
Зная эти исходные данные, позвольте нам определить, как манипулировать средой MATLAB, чтобы облегчить вычисление обратной функции. Из приведенного выше руководства было установлено, что если два матрицы умножают друг друга, чтобы равняться матрице идентификации, они являются обратными друг с другом.
Ниже приведены отношения:
AA -1 = A -1 A = 1
в команде MATLAB В центре пользователь может попытаться вычислить эту функцию.Пользователь должен знать что не все матрицы из-за характера требуемых вычислений будут иметь обратное. MATLAB имеет подробную систему кодирования и желаемую функцию для вычисление обратной функции обозначается функцией inv . Следующий пример — идеальный способ показать вычислительная мощность MATLAB в работе:
ПримерСоздайте файл сценария и введите следующий код —
a = [1 2 3; 2 3 4; 1 2 5]
inv (a)
При запуске файл, он отображает следующий результат —
a =
1 2 3
2 3 4
1 2 5
ans =
-3.5000 2,0000 0,5000
3,0000 -1,0000 -1,0000
-0,5000 0 0,5000
ВыводыИз приведенных выше расчетов и подробной теории и предыстории можно легко определить, что MATLAB R2018b является мощным инструментом моделирования.
Система требует специальных знаний, чтобы правильно кодировать и перемещаться по системе, и изначально требует крутого обучения. К счастью, существует множество инструментов поддержки и учебных пособий, таких как наше, которые доступны в Интернете, что облегчит плавный переход в мир MATLAB.Поскольку геймификация набирает обороты, пользователи будут получать удовольствие от задачи, которую будет решать система, чтобы помочь им в увлекательной и интерактивной манере получить средства, с помощью которых их системы могут быть смоделированы перед фактическими вычислениями.
Матричные вычисления повсеместны, и они могут только помочь нам продвигать науку и технологии. Используйте приведенный выше учебник, чтобы помочь с вашим научные и инженерные нужды.
Источник изображения: https://www.tutorialspoint.com/matlab/matlab_matrix_inverse.htm
Использование подробной матрицы: https://www.decodedscience.org/practical-uses-matrix-mat Mathematics/40494
Что такое обратная матрица?
Матрица, обратная матрице A, — это матрица, которая при умножении на A дает единицу.
Обозначение для этой обратной матрицы: A –1 .
объявление
Вы уже знакомы с этой концепцией, даже если не понимаете ее! При работе с числами, такими как 3 или –5, существует число, называемое обратным множителем, на которое вы можете умножить каждое из них, чтобы получить тождество 1.В случае 3 это обратное значение равно 1/3, а в случае –5 — –1/5.
У каждой матрицы есть инверсия?
Думая о числе 0, нет числа, на которое можно было бы умножить его, чтобы получить 1. Итак, число 0 не имеет обратного умножения.
Точно так же не каждая матрица имеет инверсию. Чтобы это было возможно, матрица сначала должна быть квадратной (такое же количество строк, как и столбцов). Даже тогда обратного может и не быть. Говоря о матрице с инверсией или без нее, используется следующая терминология:
- Матрица называется обратимой или, реже, невырожденной , если она имеет обратную.
- Матрица называется сингулярной или необратимой , если она не имеет обратной.
Часто невозможно просто взглянуть на матрицу и определить, обратима она или нет. Рассмотрим следующую матрицу.
Вы можете проверить, что эта матрица необратима, с помощью вашего калькулятора. Или, если вы много изучили линейную алгебру, вы можете сказать, внимательно изучив столбцы (подсказка: это связано с линейной зависимостью).
Как определить, обратима ли матрица?
Это одна из самых больших областей изучения курса линейной алгебры, поскольку выясняется, что обратимые матрицы связаны с системами уравнений и другими понятиями, такими как линейная независимость или зависимость. Эта идея будет рассмотрена в следующих статьях.
Подпишитесь на нашу рассылку новостей!
Мы всегда публикуем новые бесплатные уроки и добавляем новые учебные пособия, руководства по калькуляторам и пакеты задач.
Подпишитесь, чтобы получать электронные письма (раз в пару или три недели) с информацией о новинках!
Связанные
Математические слова: инверсия матрицы
Инверсия матрицы
Инверсия матрицы
Мультипликативная обратная матрицаДля квадратной матрицы A обратная записывается A -1 .
Когда A умножается на A -1 . результатом является единичная матрица I. Неквадратные матрицы не имеют обратных.
Примечание. Не все квадратные матрицы имеют обратные. Квадратная матрица, имеющая обратную, называется обратимой или невырожденной, а квадратная матрица без обратной называется необратимой или сингулярной.
AA -1 = A -1 A = I
Пример: Для матрицы это обратное значение, так как
AA -1 =и A -1 A =.
Вот три способа найти обратную матрицу:
1.
Ярлык для матриц 2×2
Для можно найти обратное по следующей формуле:
Пример :
2. Метод дополненной матрицы
Используйте метод исключения Гаусса-Жордана для преобразования [A | I] в [I | А -1 ].
Пример : Следующие шаги приводят к.
Итак, мы это видим.
3. Сопряженный метод
A -1 = (присоединенный к A) или A -1 = (матрица сомножителей A) T
Пример : Следующие шаги приводят к A -1 для.