Матрица фотоаппарата: всё что нужно знать о ней и мегапикселях | Статьи | Фото, видео, оптика
При покупке фотоаппарата одна из вещей, на которую стоит обратить внимание — матрица и её характеристики. Это самая дорогая и сложная по устройство деталь фотоаппарата.
Разбираемся, что такое матрица, какие параметры у неё бывают, и почему количество мегапикселей при современном развитии техники не самый важный маркер качества.
pixabay.com
Что такое матрица в фотоаппарате
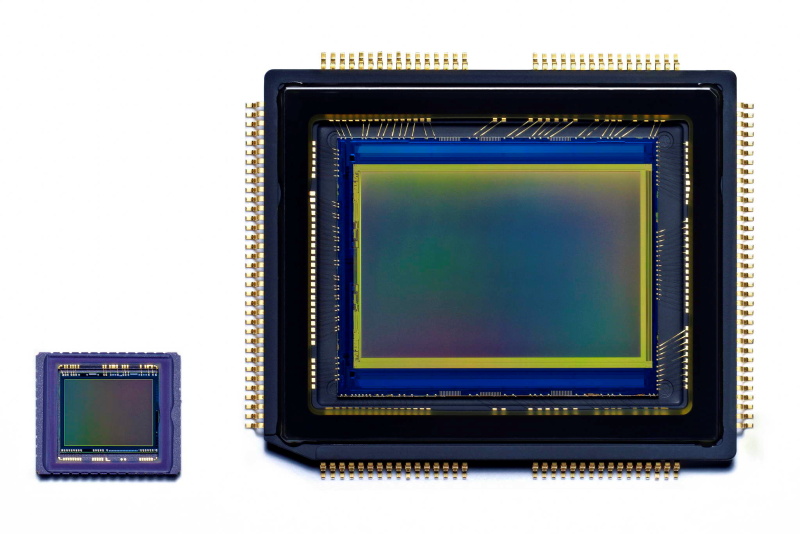
Матрица — это специальная светочувствительная микросхема в фотоаппарате. Она принимает попадающий в камеру свет и формирует электрический сигнал, который преобразует в цифровой. По сути, матрица «превращает» свет в изображение.
Блестящее «стёклышко» в центре микросхемы — и есть матрица / wikimedia.org
Раньше фотоаппараты фиксировали сцену в кадре с помощью светочувствительной плёнки. Матрица зеркального и цифрового фотоаппаратов — это усовершенствованный технически аналог плёнки.
Что такое пиксели и мегапиксели в матрице
Матрица состоит из маленьких отдельных фотодиодов. Они чувствительны к свету. И именно они ловят его и преобразовывают в электрический сигнал. Один диод — это один пиксель цифровой фотографии. Получается пиксель матрицы фотоаппарата — маленький квадратик, за которым закреплены определённые цвет и яркость, которые уловила матрица фотодиодом.
Снимок, увеличенный до 12800%. При таком приближении картинка начинает распадаться на отдельные квадратики. Каждый квадратик — пиксель / Иллюстрация автора
Все вместе пиксели составляют изображение, которое мы видит на мониторе или в экране телефона. У современной техники они настолько малы, что глаз не может различить каждый пиксель отдельно, и мы воспринимаем картинку целостно.
У современных камер количество пикселей (фотодиодов на матрице, которые ловят свет) настолько велико, что их записывают и измеряют в миллионах. То есть в мегапикселях (МП).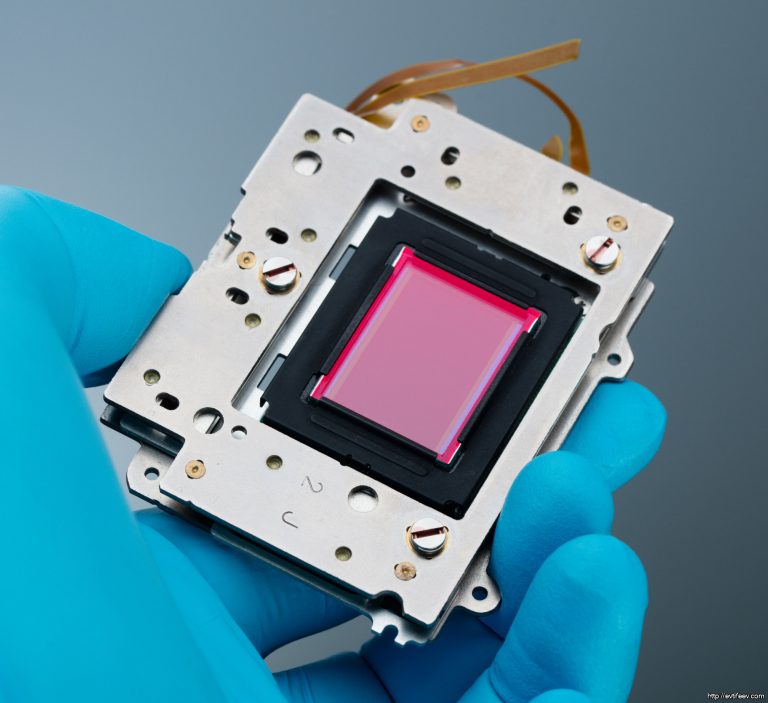
Число мегапикселей — то, сколько миллионов пикселей содержит матрица. Проще всего его подсчитать, если умножить число пикселей по длине и по высоте. Например, у нас есть матрица с 5184 пикселями по длине и 3456 пикселями по высоте. 5184х3456 — это 18 мегапикселей. А, например, у Canon EOS 850D максимальное разрешение 6400х4000, что соответствует 24МП. К слову, число, указывающее количество пикселей по длине и ширине — это разрешение матрицы фотоаппарата.
Казалось бы, всё просто — чем больше мегапикселей у матрицы, тем лучше. Но это было актуально раньше, когда технология развивалась. Гораздо важнее физический размер пикселя (фотодиода) в матрице. Чем он больше, тем больше света на него попадает и тем меньше на фотографии будет шумов.
Именно поэтому, если вечером вы сфотографируете одну и ту же сцену на смартфон и на фотоаппарат, то у второго шумов будет меньше, а качество картинки — выше. Хотя по количеству мегапикселей смартфон может даже обгонять камеру! Дело в том, что у телефона физический размер пикселей гораздо меньше. И именно поэтому профессиональные и полупроф камеры никогда не были маленькими.
И именно поэтому профессиональные и полупроф камеры никогда не были маленькими.
Вывод: если выбирать между фотоаппаратами, у которых одинаковый размер матрицы (о характеристиках матриц ниже), но разное разрешение, то качественнее картинка будет у того, у которого физический размер пикселя больше. То есть, у которого общее число пикселей меньше!
Как рассчитать физический размер пикселя?
- Посмотрите характеристики фотокамеры. Найдите разрешение (в пикселях) и физический размер матрицы (измеряется в миллиметрах).
- Поделите физическую длину матрицы на количество точек по длинной стороне. Полученное число — физический размер пикселя.
Например: у Canon EOS 5D Mark IV физический размер матрицы по длинной стороне — 36мм, а максимальное разрешение — 6720 пикселей. Делим 36 на 6.720 и получаем 0,005. Это и есть размер пикселя. Также у Nikon D780 делим 35.9мм на 6048 пикселей и получаем то же самое число — 0,005.
Характеристики матриц у фотоаппаратов
Рассмотрим характеристики матрицы, на которые можно опираться при выборе фотоаппарата. При этом важно, для каких целей вы берёте камеру. Если интересна ночная съемка, то следует обратить внимание на светочувствительность матрицы и то, насколько фотоаппарат «шумный». Если же нужна компактная камера для путешествий раз в год, то нет смысла переплачивать десятки тысяч за тяжёлую и громоздкую махину для профсъёмки.
При этом важно, для каких целей вы берёте камеру. Если интересна ночная съемка, то следует обратить внимание на светочувствительность матрицы и то, насколько фотоаппарат «шумный». Если же нужна компактная камера для путешествий раз в год, то нет смысла переплачивать десятки тысяч за тяжёлую и громоздкую махину для профсъёмки.
Размер
Матрица — прямоугольная пластина со светочувствительными фотоэлементами на ней. Как мы выяснили выше, чем больше фотоэлемент (который потом станет пикселем), тем лучше качество снимка.
Да, пиксели могут быть одинаковыми на матрицах разного размера. Просто в таком случае их будет меньше и, соответственно, у фотоаппарата будет меньше разрешение. Но, в теории, чем больше матрица, тем больше фотодиодов бОльшего размера на ней можно разместить.
Естественно, матрицы бывают разных форматов. Для них есть условная точка отсчёта размеров — это полный кадр (можно встретить названия фуллфрейм, полнокадровый фотоаппарат, FullFrame, FF).
Физический размер полнокадровой матрицы фотоаппарата — 36х24мм. Почему именно 36 на 24? В плёночную эпоху это был стандартный размер фотоплёнки. И именно размер кадра в старых плёночных фотоаппаратах взяли за точку отсчёта.
Почему именно 36 на 24? В плёночную эпоху это был стандартный размер фотоплёнки. И именно размер кадра в старых плёночных фотоаппаратах взяли за точку отсчёта.
Кроп-фактор матрицы
Кроп-фактор — условный коэффициент, который обозначает, насколько матрица камеры меньше, если сравнивать с полнокадровой. Фуллфрейм — точка отсчёта, и именно поэтому в таблице ниже кроп-фактор фуллфрейма — единица. Фотоаппараты с размером матрицы меньше полнокадрового называют «кропнутыми».
Если всю картинку мы принимаем за полный кадр, то часть картинки в красном прямоугольнике — то, сколько от той же самой сцены захватит кропнутый фотоаппарат / Иллюстрация автора
На что влияет кроп-фактор?
- Фотоаппарат захватывает меньшую область, чем полнокадровая камера. Угол обзора уменьшается, так как уменьшается поле зрения кадра.
Это как смотреть сквозь свернутый в трубочку лист бумаги. Без него вы видете полную с цену, с ним — выхватываете отдельные детали.
– Для кропнутых камер есть своя оптика, которая не пойдет на полнокадровые фотоаппараты. У Canon такие объективы маркируют буквами EF-S, а у Nikon — DX. Например, Canon EF-S 10-18mm или Nikon 35mm f/1.8G AF-S DX. Sony отмечает оптику для полного кадра маркировкой FE вместо E для кроп-фотоаппаратов. Сравните: Sony E 18-105mm f/4 G OSS PZ и Sony FE 24mm F1.4 GM.
– На кропнутые камеры встает оптика для полнокадровых фотоаппаратов. Но угол обзора на них будет меньше. Например, если на камеру с кроп-фактором 1,52 поставить объектив с фокусным расстоянием 50мм, то его реально фокусное расстояние будет 75мм.
– Если надеть объектив для кропнутых камер на полноформатный фотоаппарат, по границам кадра поползет заметная чёрная виньетка. Но, например, у некоторых камер Nikon есть DX режим, который при съёмке сразу же кадрирует фотографию и тем самым обрезает виньетку.
Размер матриц фотоаппаратов. Таблица
Подразумевая размер матрицы, могут употреблять любое из этих значений: название формата или длину матрицы по диагонали, её размер в миллиметрах или кроп-фактор.
| Формат или диагональ (дюймы) | Размер (мм) | Кроп-фактор |
| Large format | 56 x 36 | 0.52 |
| Medium format | 44 х 33 | 0.78 |
| FullFrame или 13/8″ | 36 × 24 | 1 |
| APS-H Canon | 28,1 × 18,7 | 1,28 |
| APS-H Leica | 27 × 18 | 1,33 |
| APS-C | 23,7 × 15,6 | 1,52 |
| APS-C | 23,7 × 15,7 | 1,52 |
| APS-C | 23,7 × 15,8 | 1,52 |
| APS-C Canon | 22,3 × 14,9 | 1,61 |
| Foveon X3 | 20,7 × 13,8 | 1,74 |
| 1,5″ | 18,7 × 14,0 | 1,85 |
| 4/3″ | 17,3 × 13,0 | 2 |
| 1″ | 12,8 × 9,6 | 2,7 |
| 1″ | 13,2 × 8,8 | 2,73 |
| 1/1,33″ | 9,6 × 7,2 | 3,58 |
| 2/3″ | 8,8 × 6,6 | 3,93 |
| 1/1,63″ | 8,0 × 6,0 | 4,33 |
| 1/1,7″ | 7,6 × 5,7 | 4,55 |
| 1/1,8″ | 7,2 × 5,3 | 4,84 |
| 1/2″ | 6,4 × 4,8 | 5,41 |
| 1/2,3″ | 6,16 × 4,62 | 5,62 |
| 1/2,33″ | 6,08 × 4,56 | 5,92 |
| 1/2,5″ | 5,8 × 4,3 | 6,2 |
| 1/2,7″ | 5,4 × 4,0 | 6,7 |
| 1/2,8″ | 5,1 × 3,8 | 7,05 |
| 1/3″ | 4,8 × 3,6 | 7,5 |
| 1/3,2″ | 4,54 × 3,42 | 7,92 |
| 1/3,6″ | 4 × 3 | 9 |
| 1/4″ | 3,6 × 2,7 | 10 |
| 1/6″ | 2,4 × 1,8 | 15 |
| 1/8″ | 1,8 × 1,35 | 20 |
На что влияет размер матрицы
- количество шумов (зернистости) на фотографии.
 Чем больше матрица, тем более детализированный и чистый кадр получится. Это важный параметр, если вы снимаете в условиях плохой освещённости, вечером, ночью. Днём в яркий солнечный день разница не будет видна.
Чем больше матрица, тем более детализированный и чистый кадр получится. Это важный параметр, если вы снимаете в условиях плохой освещённости, вечером, ночью. Днём в яркий солнечный день разница не будет видна. - динамический диапазон. То есть насколько широкий диапазон яркости может захватить камера, не теряя при этом качество в тенях и светах.
- глубина цвета. Чем больше матрица, тем больше оттенков и полутонов она сможет зафиксировать. Это видно на однотонных снимках. Например, зимних пейзажах. То есть, актуально достаточно редко.
- размер камеры. Чем больше матрица, тем больше и тяжелее камера.
- широта обзора. Чем больше кроп-фактор, тем уже обзор. При прочих равных визуально кажется, что объект, сфотографированный на кропнутый фотоаппарат, ближе.
Светочувствительность
Этот тот самый параметр ISO. Если перекладывать это на матрицу, то, чем выше ISO, тем более тёмные элементы может поймать фотоаппарат. Чем выше ISO, тем светлее кадр и больше шумов.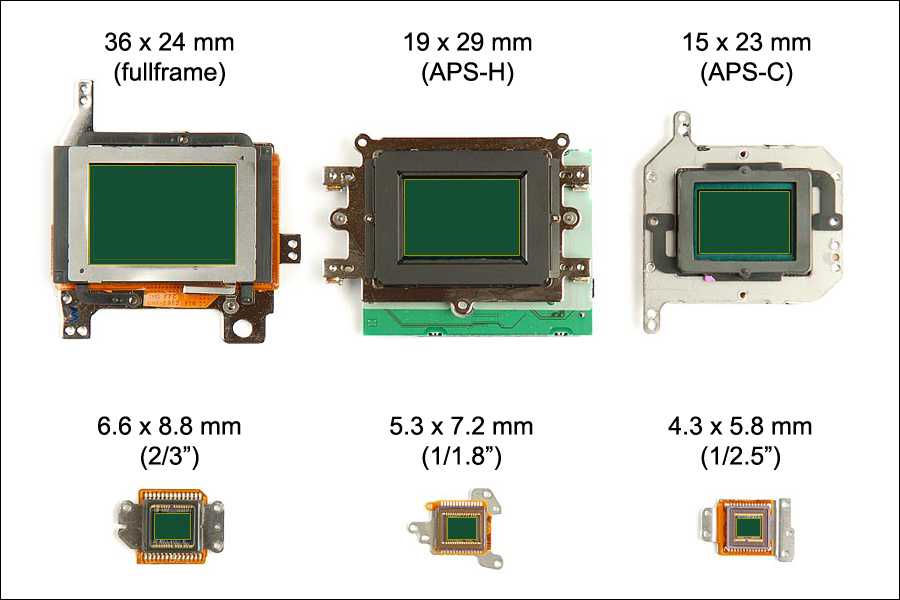
Минимальное возможное ISO — 50. Но у разных камер разные минимальные и максимальные значения. Так, у Nikon D5600 ISO колеблется в диапазоне от 100 до 25 000, а у PENTAX K-70 — от 100 до 3 200.
Тип матриц фотоаппаратов
Матрицы различаются по технологии, на основе которой они работают.
Не так давно между собой конкурировали два основных типа:
- CCD (от Charge Coupled Device или ПЗС по-русски). У таких матриц мельчайший структурный элемент — диод.
- CMOS (от Complementary Metal Oxide Semiconductor или КМОП-матрица по-русски). В основе этих матриц транзисторы с каналами разной проводимости.
Сейчас не особо актуально, так как большинство фотоаппаратов оснащают CMOS-матрицами. Они потребляют меньше энергии, выдают меньше шумов на снимке, лучше чувствуют себя в условиях плохого освещения, а также более дешёвы в производстве, если сравнивать с CCD-матрицами.
CCD-матрица компактного фотоаппарата Canon PowerShot A480 / wikimedia. org
org
Стабилизация матрицы
Считается, что стабилизация помогает сделать картинку менее смазанной, если вы снимаете с рук и на удлиненных значениях выдержки. Эту технологию активно используют и продвигают Sony, Panasonic, Olympus, Nikon. Например, матричная стабилизация есть у Sony Alpha A7С или Panasonic Lumix DC-GH5.
Но, по большому счёту, это лишь маркетинговый ход. Так как никакая стабилизация не является панацеей и не изменит ситуацию кардинально. Профессионалы знают, что ничто не зафиксирует камеру лучше, чем штатив (читайте, как его выбрать). Кроме того, эта функция работает тяжело, если выдержка действительно высокая (от 1 секунды и больше).
Если же сравнивать стабилизацию матриц и объективов, то матричная не влияет на светосилу, что однозначно плюс. При этом более эффективной и надежной всё же считается оптическая стабилизация.
Что такое матрица? Кроп-фактор?
Прежде, чем купить фотоаппарат, вам необходимо ответить на ряд очень важных вопросов: сколько мегапикселей должна иметь матрица фотоаппарата, будет ли это полнокадровый фотоаппарат или камера с так называемой кропнутой матрицей, а также будет это зеркальный или беззеркальный фотоаппарат? Давайте разберемся с этими понятиями по порядку.
Матрица – это часть фотоаппарата, которая предназначена для регистрации света, проходящего через объектив. По сути, матрицы цифровых фотоаппаратов это аналог фотопленки в пленочных камерах. Матрица состоит из множества светочувствительных элементов – пикселей. Пиксели настолько маленькие и их так много, что для обозначения их количества используют приставку мега-, которая означает миллион. Чтобы понять, какое количество мегапикселей нужно именно вам, нужно определиться, для каких целей вы приобретаете камеру. Если вы планируете использовать ее в личных целях, для съемки бытовых сюжетов и в путешествиях, то вам вполне подойдут камеры с матрицами больше 10 мегапикселей. Если же планируется использовать камеру в коммерческих целях, то стоит задуматься над покупкой камеры с 20-мегапиксельной матрицей. Однако, стоит предостеречь вас от погони за огромными значениями этого параметра. Дело в том, что физический размер матрицы с ростом числа мегапикселей не изменяется, а, следовательно, физический размер самого пикселя будет уменьшаться.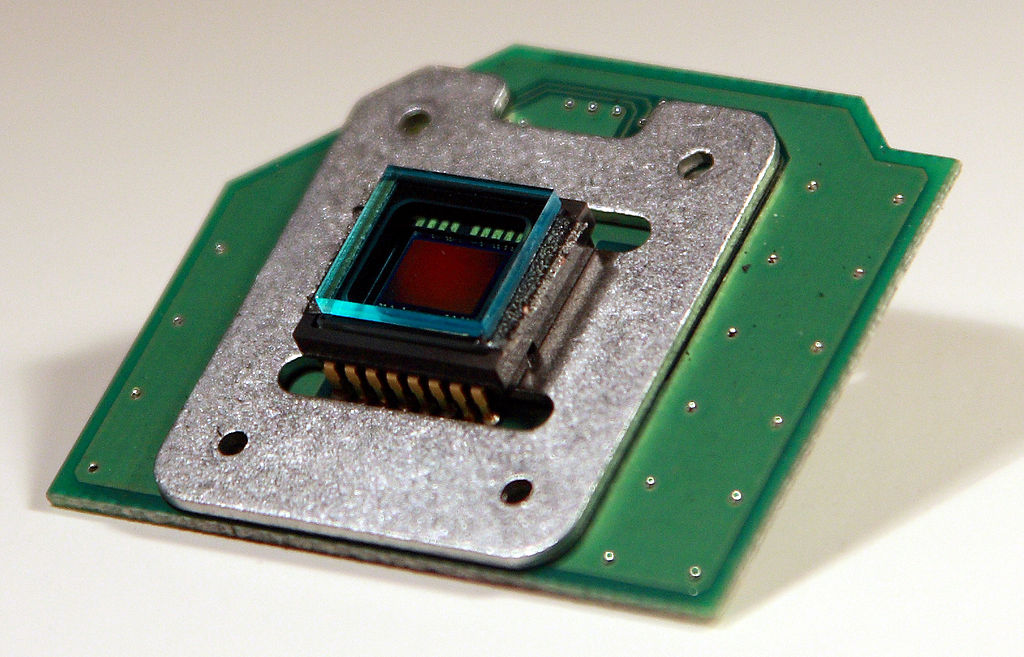
Теперь давайте разберемся с понятием кропа. Само это слово происходит от английского crop – «обрезать», и в среде фотографов служит для обозначения матриц (и камер с такими матрицами), размер которых меньше, чем размер полнокадровых матриц, которые по площади соответствуют пленочному кадру. Степень уменьшения кроп-матрицы выражается с помощью кроп-фактора. Например, матрица с кроп-фактором 1,5 в полтора раза меньше полнокадровой матрицы. Из вышесказанного можно сделать один важный вывод: если вы планируете покупку камеры с 20- и более мегапиксельной матрицей, то предпочтение лучше отдать полнокадровым камерам, т.к. физический размер пикселя на них будет больше. Но какую камеру выбрать, если речь идет о бытовом использовании? Увы, здесь нет однозначного ответа.
В завершении темы кропнутых и полнокадровых матриц хотелось бы внести ясность и в еще один вопрос. На просторах Интернета часто можно слышать мнение о том, что ГРИП (Глубина Резко Изображенного Пространства) отличается в зависимости от размера матрицы, а у полного кадра существует некий особый рисунок, присущий только этим камерам. Дело в том, что все эти утверждения не имеют ничего общего с техникой и здравым смыслом. ГРИП зависит только от трех параметров – от диафрагмы, фокусного расстояния и от расстояния до объекта съемки. Размер матрицы не оказывает на него никакого влияния. Качество изображения, также как и рисунок, зависят в основном от используемой оптики. Один и тот же объектив на обоих типах матриц даст одинаковое качество изображения. Важно только помнить, что при использовании полнокадрового объектива на кропнутой матрице в поле ее зрения будет попадать лишь часть формируемого объективом изображения. Многие ошибочно называют это увеличением, но это не так. Просто мы фиксируем лишь часть от полной картинки. Чтобы понять какую именно, нужно вновь обратиться к кроп-фактору.
На просторах Интернета часто можно слышать мнение о том, что ГРИП (Глубина Резко Изображенного Пространства) отличается в зависимости от размера матрицы, а у полного кадра существует некий особый рисунок, присущий только этим камерам. Дело в том, что все эти утверждения не имеют ничего общего с техникой и здравым смыслом. ГРИП зависит только от трех параметров – от диафрагмы, фокусного расстояния и от расстояния до объекта съемки. Размер матрицы не оказывает на него никакого влияния. Качество изображения, также как и рисунок, зависят в основном от используемой оптики. Один и тот же объектив на обоих типах матриц даст одинаковое качество изображения. Важно только помнить, что при использовании полнокадрового объектива на кропнутой матрице в поле ее зрения будет попадать лишь часть формируемого объективом изображения. Многие ошибочно называют это увеличением, но это не так. Просто мы фиксируем лишь часть от полной картинки. Чтобы понять какую именно, нужно вновь обратиться к кроп-фактору.
В последнее время рынок фототехники все уверенней завоевывают беззеркальные камеры. В чем их плюсы и минусы по сравнению с традиционными зеркалками? Основной плюс кроется в самой конструкции – в них отсутствует громоздкое зеркало и поднимающая его система, которые служат в зеркальных фотоаппаратах для передачи изображения из объектива в оптический видоискатель. За счет этого достигается меньший вес и размеры камеры. К плюсам таких камер относится и электронный видоискатель, который значительно облегчает настройку камеры (особенно для новичков) и использование мануальной оптики. Но есть и минусы – все тот же видоискатель является мощным потребителем электроэнергии и, естественно, приводит к более быстрой разрядке аккумуляторов, которые, к слову, в угоду уменьшения веса и размера и без того уступают аккумуляторам зеркалок.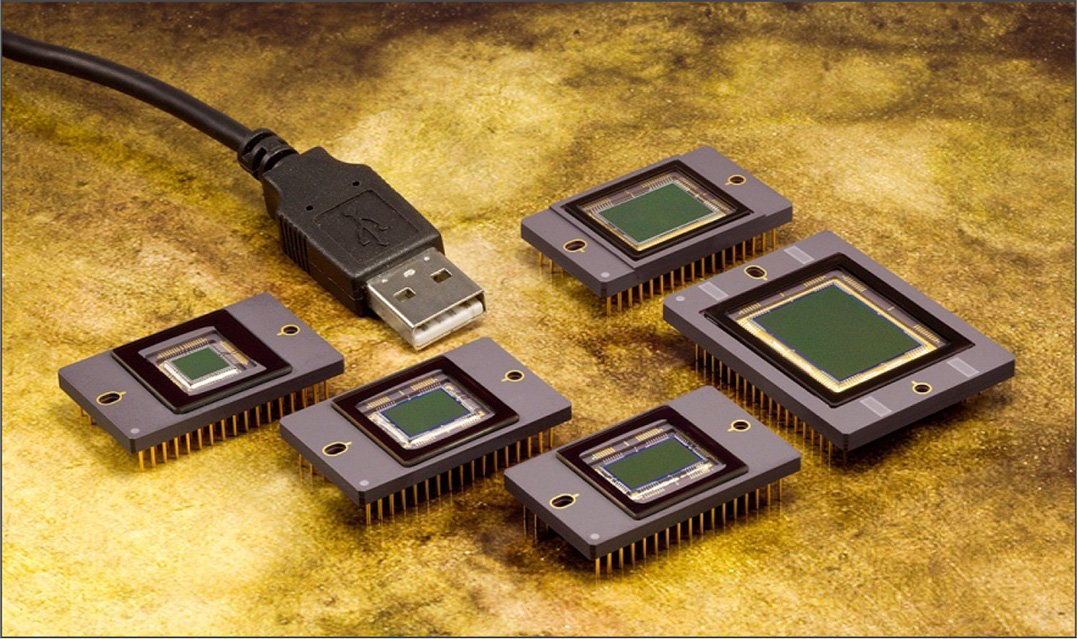
Что такое матрица в фотоаппарате и её основные параметры
Матрица фотокамеры служит для преобразования попадающего на нее с объектива светового потока в электрические сигналы, которые затем камера и преобразует в снимок. Делается это при помощи фотодатчиков, расположенных на матрице в большом количестве.Что такое матрица фотоаппарата — это микросхема, состоящая из фотодатчиков, которые реагируют на свет.
Структура самой матрицы является дискретной, то есть состоящей из миллионов элементов (фотоэлементов), преобразующих свет.Поэтому в характеристиках фотоаппарата как раз и указывается количество элементов матрицы, которое мы знаем как
Именно от самой матрицы и зависит количество мегапикселей фотоаппарата, которое может принимать значение от 0. 3 (для дешевых телефонных фотоаппаратов) до 10 и больше мегапикселей у современных фотоаппаратов. Например, 0,3 Мп это в переводе уже 300 тысяч фотоэлементов на поверхности матрицы.Характеристиками матрицы можно считать такие параметры:
3 (для дешевых телефонных фотоаппаратов) до 10 и больше мегапикселей у современных фотоаппаратов. Например, 0,3 Мп это в переводе уже 300 тысяч фотоэлементов на поверхности матрицы.Характеристиками матрицы можно считать такие параметры:
- Физический размер
- Разрешение (мегапиксели)
- Светочувствительность
- Отношение сигнал-шум
Сама матрица фотоаппарата формирует черно белое изображение, поэтому для получения цветного изображения, элементы матрицы могут покрывать светофильтрами (красный, зеленый, синий). И если сохранять фотографию в формате JPEG и TIFF, то цвета пикселей фотоаппарат вычисляет сам, а при использовании формата RAW пиксели будут окрашены в один из трех цветов, что позволит обработать такой снимок на компьютере без потери качества.
Физический размер
Еще одной характеристикой матрицы является размер. Обычно размер указывается как дробь в дюймах. Чем больше размер, тем меньше шума будет на фотографии и больше света регистрируется, а значит, больше оттенков получится. Размер матрицы очень важный параметр всего фотоаппарата.
Размер матрицы очень важный параметр всего фотоаппарата.
Чувствительность и шумы
В фототехнике применительно к матрицам используется термин «эквивалентная» чувствительность. Происходит это потому, что настоящую чувствительность измеряют различными способами в зависимости от назначения матрицы, а применяя усиление сигнала и цифровую обработку, можно сильно изменить чувствительность в больших пределах.
Светочувствительность любого фотоматериала показывает способность этого материала преобразовывать электромагнитное воздействие света в электрический сигнал. То есть, сколько нужно света, что бы получить нормальный уровень электрического сигнала на выходе.
Чувствительность матрицы (ISO) влияет на съемки в темных местах. Чем больше чувствительность можно выставить в настройках, тем лучше будет качество снимков в темноте при нужных диафрагме и выдержке. Значение ISO может быть от нескольких десятков до нескольких десятков тысяч. Недостатком большой светочувствительности может быть проявление шума на фотографии в виде зернистости. Так же чувствительность участвует в настройке экспозиции.
Так же чувствительность участвует в настройке экспозиции.
Размер и количество пикселей
Размер матрицы и ее разрядность в мегапикселях связаны между собой такой зависимостью: чем меньше размер, тем должно быть и меньше мегапикселей. Иначе из-за близкого размещения фотоэлементов возникает эффект дифракции и может получиться эффект замыливания на фотографиях, то есть пропадет четкость на снимке.
Еще размер матрицы и ее разрешение определяют размер пикселя и соответственно динамический диапазон, который показывает возможность фотокамеры отличить самые темные оттенки от самых светлых и передать их на снимке.
Так же чем больше размер пикселя, тем больше отношение сигнал-шум ведь больший по размерам пиксель может собрать больше света и увеличивается уровень сигнала. Поэтому при одинаковом размере матрицы меньшее количество мегапикселей может быть даже полезнее для качества фотографии.
Чем больше физический размер пикселя (англ. pixel — picture element), тем больше он сможет собрать падающего на него света и тем больше будет соотношение сигнал-шум при заданной чувствительности.
Размер пикселя зависит от физического размера матрицы и её разрешения. Размер пикселя влияет на фотографическую широту.
Разрешение
Разрешение матрицы зависит от количества используемых пикселей для формирования изображения. Объектив формирует поток света, а матрица разделяет его на пиксели. Но оптика объектива также имеет свое разрешение. И если разрешение объектива не достаточное, и он передает две светящиеся точки с разделением черной точкой как одну светящуюся, то точного разрешения фотоаппарата, которое зависит от значения Мп, можно и не заметить. Поэтому результирующее разрешение фотокамеры зависит и от разрешения матрицы и от разрешения объектива, измеряемое в количестве линий на миллиметр.
Поэтому результирующее разрешение фотокамеры зависит и от разрешения матрицы и от разрешения объектива, измеряемое в количестве линий на миллиметр.
И максимальным это разрешение будет, когда разрешение объектива соответствует разрешению матрицы. Разрешение цифровых матриц зависит от размера пикселя, который может быть от 0,002 мм до 0,008 мм (2-8 мкм). Сегодня количество мегапикселей на фотосенсоре может дистигать значения 30 Мп.
Структура матрицыОтношение сторон матрицы
В современных фотоаппаратах применяются матрицы с форматами 4:3, 3:2, 16:9. В любительских цифровых фотоаппаратах обычно используется формат 4:3. В зеркальных цифровых фотоаппаратах обычно применяют матрицы формата 3:2, если специально не оговорено применение формата 4:3. Формат 16:9 редко используется.
Тип матрицы
Раньше в основном использовались фотосенсоры на основе ПЗС (прибор зарядовой связи, по-английски CCD — Charge-Coupled Device). Эти матрицы состоят из светочувствительных светодиодов и используют технологию приборов с зарядовой связью (ПЗС). Успешно применяется и в наше время.
Успешно применяется и в наше время.
Но в 1993 году была реализована технология Activ Pixel Sensors. Её развитие привело к внедрению в 2008 году КМОП-матрицы (комплиментарный металл-оксид-полупроводник, по-английски CMOS — Complementary-symmetry/Metal-Oxide Semiconductor). При этой технологии возможна выборка отдельных пикселей, как в обычной памяти, а каждый пиксель снабжен усилителем. Так же матрицы на этой технологии могут иметь и автоматическую систему настройки времени экспонирования для каждого пикселя. Это позволяет увеличить фотографическую широту.
Фирма Panasonic создала свою матрицу Live-MOS-матрицу. Она работает на МОП технологии. Применяя такую матрицу можно получить живое изображение без перегрева и увеличения шумов.
Анализ матрицы камеры, Часть 3: Внутренняя матрица ←
13 августа 2013 г.
Примечание автора: исходный файл для всех диаграмм этого поста доступен по лицензии Creative Commons.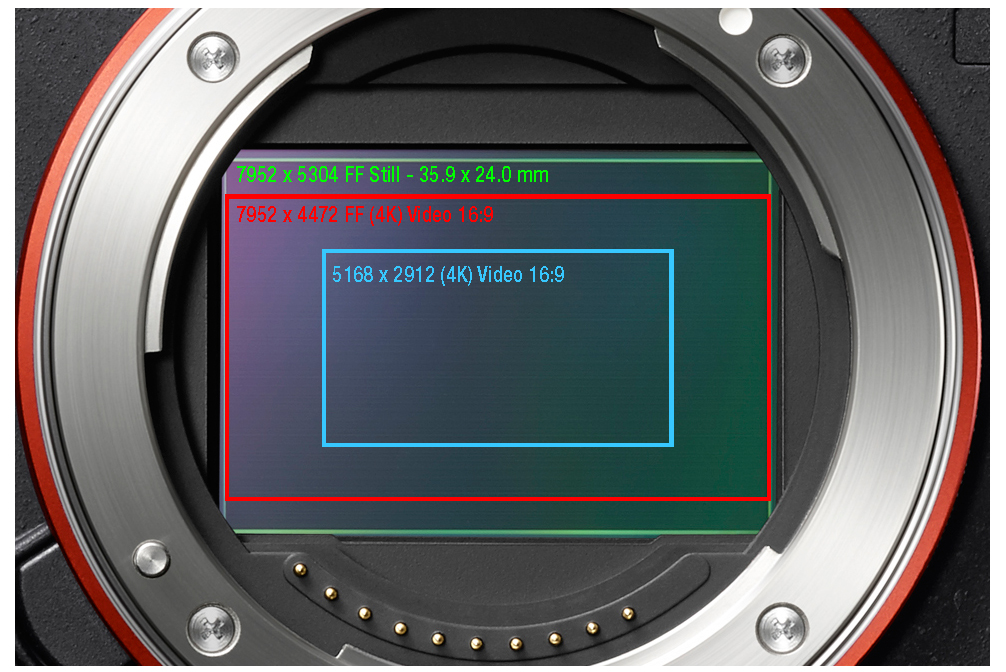 Пожалуйста, не стесняйтесь изменять и делиться!
Пожалуйста, не стесняйтесь изменять и делиться!
Авторы и права: Dave6163 (через Flickr)
Сегодня мы будем изучать внутреннюю матрицу камеры в нашей третьей и последней главе трилогии «Расчленение матрицы камеры». В первой статье мы узнали, как разделить полную матрицу камеры на внутреннюю и внешнюю матрицы и как правильно обрабатывать неоднозначности, возникающие в этом процессе. Во второй статье внешняя матрица была рассмотрена более подробно, рассмотрено несколько различных интерпретаций ее трехмерных вращений и перемещений. Сегодня мы дадим такую же трактовку внутренней матрице, исследуя две эквивалентные интерпретации: как описание геометрии виртуальной камеры и как последовательность простых 2D-преобразований. После этого вы увидите интерактивную демонстрацию, иллюстрирующую обе интерпретации.
Если вам не интересно углубляться в теорию и вы просто хотите использовать внутреннюю матрицу с OpenGL, ознакомьтесь со статьями Калибровка камер в OpenGL без glFrustum и Калибровка камер и gluPerspective.
Все эти статьи являются частью серии «Перспективная камера, интерактивный тур». Чтобы прочитать другие статьи из этой серии, перейдите к оглавлению.
Внутренняя матрица преобразует координаты 3D-камеры в координаты однородного 2D-изображения. Эта перспективная проекция моделируется идеальной камерой-обскурой, показанной ниже.
Внутренняя матрица параметризована Хартли и Зиссерманом как
\[ К = \ влево ( \begin{массив}{ c c c} f_x&s&x_0\ 0 & f_y & y_0 \\ 0 и 0 и 1 \\ \конец{массив} \Правильно ) \]
Каждый встроенный параметр описывает геометрическое свойство камеры. Рассмотрим подробно каждое из этих свойств.
Фокусное расстояние, \(f_x\), \(f_y\)
Фокусное расстояние — это расстояние между точечным отверстием и пленкой (также известной как плоскость изображения). По причинам, которые мы обсудим позже, фокусное расстояние измеряется в пикселях. В настоящей камере-обскуре и \(f_x\), и \(f_y\) имеют одинаковое значение, что показано как \(f\) ниже.
В настоящей камере-обскуре и \(f_x\), и \(f_y\) имеют одинаковое значение, что показано как \(f\) ниже.
На практике \(f_x\) и \(f_y\) могут различаться по ряду причин:
- Дефекты сенсора цифровой камеры.
- Изображение было неравномерно масштабировано при постобработке.
- Объектив камеры создает непреднамеренное искажение.
- Камера использует анаморфотный формат, в котором объектив сжимает широкоэкранную сцену в матрицу стандартного размера.
- Ошибки калибровки камеры.
Во всех этих случаях результирующее изображение имеет неквадратные пиксели.
Наличие двух разных фокусных расстояний не очень интуитивно понятно, поэтому в некоторых текстах (например, Forsyth и Ponce) используется одно фокусное расстояние и «соотношение сторон», которое описывает величину отклонения от идеально квадратного пикселя. Такая параметризация хорошо отделяет геометрию камеры (то есть фокусное расстояние) от искажений (соотношение сторон).
Смещение основной точки, \(x_0\), \(y_0\)
«Главная ось» камеры — это линия, перпендикулярная плоскости изображения, которая проходит через точечное отверстие. Его пересечение с плоскостью изображения называется «главной точкой», как показано ниже.
«Смещение главной точки» — это положение главной точки относительно начала координат пленки. Точное определение зависит от того, какое соглашение используется для определения местоположения источника; на приведенном ниже рисунке предполагается, что он находится в левом нижнем углу пленки.
Увеличение \(x_0\) смещает отверстие вправо:
Это эквивалентно смещению пленки влево и оставлению отверстия без изменений.
Обратите внимание, что рамка вокруг камеры не имеет значения, имеет значение только положение отверстия относительно пленки.
Перекос оси, \(s\)
Перекос оси вызывает сдвиговое искажение проецируемого изображения. Насколько я знаю, нет никакого аналога перекоса оси настоящей камеры-обскуры, но, по-видимому, некоторые процессы оцифровки могут вызывать ненулевой перекос. Мы рассмотрим асимметрию позже.
Мы рассмотрим асимметрию позже.
Другие геометрические свойства
Фокусное расстояние и смещение главной точки представляют собой простые перемещения пленки относительно отверстия. Должны же быть другие способы трансформировать камеру, верно? Как насчет поворота или масштабирования пленки?
Вращение пленки вокруг отверстия эквивалентно вращению самой камеры, за которое отвечает внешняя матрица. Вращение пленки вокруг любой другой фиксированной точки \(x\) эквивалентно вращению вокруг отверстия \(P\) с последующим перемещением на \((x-P)\).
Как насчет масштабирования? Должно быть очевидно, что удвоение всех размеров камеры (размера пленки и фокусного расстояния) не влияет на захваченную сцену. Если вместо этого вы удваиваете размер пленки и фокусное расстояние , а не , это эквивалентно удвоению обоих (без операции), а затем уменьшению вдвое фокусного расстояния. Таким образом, явное представление масштаба фильма было бы излишним; он захватывается фокусным расстоянием.
Фокусное расстояние — от пикселей к мировым единицам
Это обсуждение масштабирования камеры показывает, что существует бесконечное количество камер-обскуры, которые производят одно и то же изображение. Внутренняя матрица связана только с соотношением между координатами камеры и координатами изображения, поэтому абсолютные размеры камеры не имеют значения. Использование единиц пикселей для фокусного расстояния и смещения главной точки позволяет нам представить относительные размеры камеры, а именно положение пленки относительно ее размера в пикселях.
Другими словами, внутреннее преобразование камеры инвариантно к равномерному масштабированию геометрии камеры. Представляя размеры в пикселях, мы естественным образом улавливаем эту неизменность.
Вы можете использовать подобные треугольники для преобразования пиксельных единиц в мировые единицы (например, мм), если вы знаете хотя бы один размер камеры в мировых единицах. Например, если вы знаете, что пленка камеры (или цифровой датчик) имеет ширину \(W\) в миллимитрах, а ширина изображения в пикселях равна \(w\), вы можете преобразовать фокусное расстояние \(f_x\) в мировые единицы, использующие:
\[ F_x = f_x \frac{W}{w} \]
Другие параметры \(f_y\), \(x_0\) и \(y_0\) можно преобразовать в их эквиваленты в мировых единицах \( F_y\), \(X_0\) и \(Y_0\), используя аналогичные уравнения:
\[ \begin{массив}{ccc} F_y = f_y \frac{H}{h} \qquad X_0 = x_0 \frac{W}{w} \qquad Y_0 = y_0 \frac{H}{h} \конец{массив} \]
Как мы обсуждали ранее, имеет значение только расположение пинхола и пленки, поэтому физическая коробка, окружающая камеру, не имеет значения. По этой причине во многих дискуссиях о геометрии камеры используется более простое визуальное представление: усеченная часть камеры.
По этой причине во многих дискуссиях о геометрии камеры используется более простое визуальное представление: усеченная часть камеры.
Область обзора камеры имеет пирамидальную форму и иногда называется «конусом видимости». Давайте добавим в нашу сцену несколько 3D-сфер и покажем, как они попадают в конус видимости и создадут изображение.
Поскольку «коробка» камеры не имеет значения, давайте удалим ее. Также обратите внимание, что изображение в фильме изображает зеркальную версию реальности. Чтобы исправить это, мы будем использовать «виртуальное изображение» вместо самого фильма. Виртуальное изображение обладает теми же свойствами, что и киноизображение, но в отличие от истинного изображения виртуальное изображение появляется перед камерой, а проецируемое изображение не переворачивается.
Обратите внимание, что положение и размер плоскости виртуального изображения произвольны — мы могли бы удвоить ее размер, если бы мы также удвоили ее расстояние от отверстия.
После удаления истинного изображения у нас остается представление «усеченной пирамиды обзора» нашей камеры-обскуры.
Отверстие заменено верхушкой конуса видимости, а пленка теперь представлена плоскостью виртуального изображения. Мы будем использовать это представление для нашей демонстрации позже.
В предыдущих разделах мы интерпретировали наши входящие 3-векторы как координаты 3D-изображения, которые преобразуются в однородные координаты 2D-изображения. В качестве альтернативы мы можем интерпретировать эти 3-векторы как двумерные однородные координаты, которые преобразуются в новый набор двумерных точек. Это дает нам новый взгляд на внутреннюю матрицу: последовательность двумерных аффинных преобразований.
Мы можем разложить внутреннюю матрицу на последовательность преобразований сдвига, масштабирования и перемещения, соответствующих наклону оси, фокусному расстоянию и смещению главной точки соответственно:
\[ \начать{выравнивать} К &= \влево ( \begin{массив}{ c c c} f_x&s&x_0\ 0 & f_y & y_0 \\ 0 и 0 и 1 \\ \конец{массив} \Правильно ) \\[0,5см] знак равно \подтяжка{ \оставил ( \begin{массив}{ c c c} 1 и 0 и х_0 \\ 0 и 1 и у_0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D-перевод} \ раз \подтяжка{ \оставил ( \begin{массив}{ c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D-масштабирование} \ раз \подтяжка{ \оставил ( \begin{массив}{ c c c} 1 & s/f_x & 0 \\ 0 и 1 и 0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D сдвиг} \end{выравнивание} \]
Эквивалентное разложение помещает сдвиг после масштабирования :
\[ \начать{выравнивать} К &= \подтяжка{ \оставил ( \begin{массив}{ c c c} 1 и 0 и х_0 \\ 0 и 1 и у_0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D-перевод} \ раз \подтяжка{ \оставил ( \begin{массив}{ c c c} 1 & s/f_y & 0 \\ 0 и 1 и 0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D сдвиг} \ раз \подтяжка{ \оставил ( \begin{массив}{ c c c} f_x & 0 & 0 \\ 0 & f_y & 0 \\ 0 и 0 и 1 \конец{массив} \Правильно ) }_\text{2D-масштабирование} \end{выравнивание} \]
Эта интерпретация хорошо разделяет внешние и внутренние параметры на сферы 3D и 2D соответственно.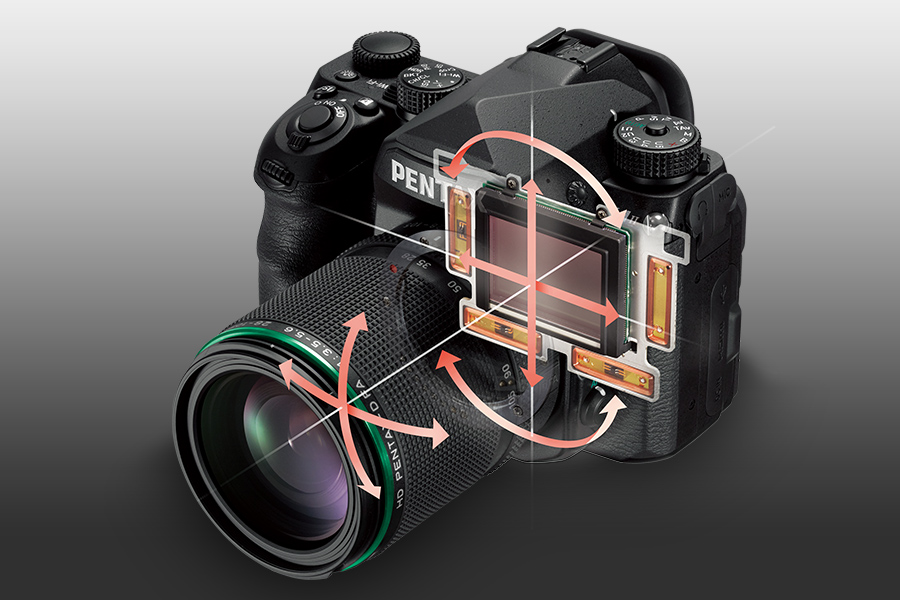 Также подчеркивается, что внутреннее преобразование камеры происходит после проецирования . Одним из примечательных результатов этого является то, что 90 129 внутренних параметров не могут влиять на видимость 90 130 — закрытые объекты не могут быть обнаружены простыми 2D-преобразованиями в пространстве изображения.
Также подчеркивается, что внутреннее преобразование камеры происходит после проецирования . Одним из примечательных результатов этого является то, что 90 129 внутренних параметров не могут влиять на видимость 90 130 — закрытые объекты не могут быть обнаружены простыми 2D-преобразованиями в пространстве изображения.
Демонстрация ниже иллюстрирует обе интерпретации внутренней матрицы. Слева интерпретация «камера-геометрия». Обратите внимание, как отверстие перемещается относительно плоскости изображения при настройке \(x_0\) и \(y_0\).
Справа интерпретация «2D преобразование». Обратите внимание, как изменение результатов фокусного расстояния вызывает масштабирование проецируемого изображения, а изменение главной точки приводит к чистому переносу.
Для этой демонстрации требуется Javascript.
В ходе этой серии статей мы увидели, как разложить
- полную матрицу камеры на внутреннюю и внешнюю матрицы,
- внешняя матрица в трехмерное вращение с последующим переводом, и 9\text{Внешняя матрица} \\[0.
 \text{Внешняя матрица}
\end{выравнивание}
\]
\text{Внешняя матрица}
\end{выравнивание}
\]Чтобы увидеть все эти трансформации в действии, зайдите на мою страницу Perpective Camera Toy, чтобы увидеть интерактивную демонстрацию полноракурсной камеры.
Есть ли у вас другие способы интерпретации внутренней матрицы камеры? Оставьте комментарий или напишите мне!
В следующий раз мы покажем, как подготовить откалиброванную камеру для создания пар стереоизображений. Тогда увидимся!
Сообщение от Кайл СимекКомпиляция ELSD (детектор эллипсов и сегментов линий) в OS X → ← Калибровка камер и gluPerspective
Пожалуйста, включите JavaScript для просмотра комментариев от Disqus.blog комментарии от Disqus Perspecive Camera — интерактивный тур». В прошлом посте мы научились разлагать матрицу камеры на произведение внутренней и внешней матриц. В следующих двух постах мы более подробно рассмотрим внешние и внутренние матрицы.
 Сначала мы рассмотрим различные способы рассмотрения внешней матрицы, а в конце покажем интерактивную демонстрацию.
Сначала мы рассмотрим различные способы рассмотрения внешней матрицы, а в конце покажем интерактивную демонстрацию.Внешняя матрица камеры
Внешняя матрица камеры описывает положение камеры в мире и направление, в котором она направлена. Те, кто знаком с OpenGL, знают это как «матрицу представления» (или «матрицу представления модели»). Он состоит из двух компонентов: матрицы вращения R и вектора перемещения t , но, как мы вскоре увидим, они не совсем соответствуют вращению и перемещению камеры. Сначала мы рассмотрим части внешней матрицы, а позже рассмотрим альтернативные способы описания позы камеры, которые являются более интуитивными.
Внешняя матрица принимает форму жесткой матрицы преобразования: матрица вращения 3×3 в левом блоке и вектор-столбец переноса 3×1 в правом:
\[ [ R \, |\, \boldsymbol{t} знак равно \left[ \begin{массив}{ccc|c} r_{1,1} & r_{1,2} & r_{1,3} & t_1 \\ r_{2,1} & r_{2,2} & r_{2,3} & t_2 \\ r_{3,1} & r_{3,2} & r_{3,3} & t_3 \\ \end{array} \right] \]
Обычно можно увидеть версию этой матрицы с дополнительной строкой (0,0,0,1), добавленной внизу.
 Это делает матрицу квадратной, что позволяет нам далее разложить эту матрицу на поворот , за которым следует перевод:
Это делает матрицу квадратной, что позволяет нам далее разложить эту матрицу на поворот , за которым следует перевод:\[ \начать{выравнивать} \оставил [ \начать{массив}{с|с} R & \boldsymbol{t} \\ \hline \boldsymbol{0} и 1 \конец{массив} \справа ] &= \оставил [ \начать{массив}{с|с} Я & \boldsymbol{t} \\ \hline \boldsymbol{0} и 1 \конец{массив} \Правильно ] \ раз \оставил [ \начать{массив}{с|с} R & \boldsymbol{0} \\ \hline \boldsymbol{0} и 1 \конец{массив} \Правильно ] \\ знак равно \left[ \begin{массив}{ccc|c} 1 & 0 & 0 & t_1 \\ 0 & 1 & 0 & t_2 \\ 0 & 0 & 1 & t_3 \\ \hline 0 и 0 и 0 и 1 \end{массив} \right] \times \left[ \begin{массив}{ccc|c} r_{1,1} & r_{1,2} & r_{1,3} & 0 \\ r_{2,1} & r_{2,2} & r_{2,3} & 0 \\ r_{3,1} & r_{3,2} & r_{3,3} & 0 \\ \hline 0 и 0 и 0 и 1 \end{массив} \right] \end{выравнивание} \]
Эта матрица описывает, как преобразовать точки в мировых координатах в координаты камеры.
 Вектор t можно интерпретировать как положение начала мира в координатах камеры, а столбцы R представляют направления мировых осей в координатах камеры.
Вектор t можно интерпретировать как положение начала мира в координатах камеры, а столбцы R представляют направления мировых осей в координатах камеры.Важно помнить о внешней матрице то, что она описывает, как мир трансформируется относительно камеры . Это часто противоречит здравому смыслу, потому что мы обычно хотим указать, как камера трансформируется относительно мира . Далее мы рассмотрим два альтернативных способа описания внешних параметров камеры, которые являются более интуитивными, и способы их преобразования в форму внешней матрицы.
Построение внешней матрицы из положения камеры
Часто более естественно указать положение камеры напрямую, чем указать, как мировые точки должны преобразовываться в координаты камеры. К счастью, построить внешнюю матрицу камеры таким образом несложно: просто создайте жесткую матрицу преобразования, описывающую положение камеры, а затем возьмите ее инверсию.
 TC \\
\hline
\boldsymbol{0} и 1 \\
\конец{массив}
\right] & \text{(умножение матриц)}
\end{выравнивание} 9Т\\
\boldsymbol{t} &= -RC
\end{выравнивание}
\]
TC \\
\hline
\boldsymbol{0} и 1 \\
\конец{массив}
\right] & \text{(умножение матриц)}
\end{выравнивание} 9Т\\
\boldsymbol{t} &= -RC
\end{выравнивание}
\]Некоторые тексты записывают внешнюю матрицу, заменяя -RC на t , что смешивает преобразование мира ( R ) и обозначение преобразования камеры ( C ).
Камера «Look-At»
Читатели, знакомые с OpenGL, могут предпочесть третий способ указания положения камеры, используя (a) положение камеры, (b) то, на что она смотрит, и (c) направление «вверх». В устаревшем OpenGL это выполняется с помощью функции gluLookAt(), поэтому мы будем называть ее «наблюдающей» камерой. Пусть C — центр камеры, p — целевая точка, а u — направление вверх. Алгоритм вычисления матрицы поворота (перефразировано из документации OpenGL):
- Вычислить L = p — C.
- Нормализовать Л.

- Вычислить s = L x u. (перекрестное произведение)
- Нормализовать с.
- Вычислить u’ = s x L.
Внешняя матрица поворота задается следующим образом:
\[ р = \ влево [ \begin{массив}{ccc} с_1 и с_2 и с_3 \\ u_1′ & u_2′ & u_3′ \\ -L_1 & -L_2 & -L_3 \конец{массив} \Правильно] \]
(Обновлено 21 мая 2014 г. — транспонированная матрица)
Вы можете получить вектор переноса так же, как и раньше, t = -RC .
Попробуйте!
Ниже представлена интерактивная демонстрация трех различных способов параметризации внешних параметров камеры. Обратите внимание, как камера движется по-разному, когда вы переключаетесь между тремя параметрами.
Для этого требуется браузер с поддержкой WebGL и включенным Javascript.
Для этой демонстрации требуется Javascript.
Заключение
Мы только что рассмотрели три различных способа параметризации внешнего состояния камеры.
 Какую параметризацию вы предпочитаете использовать, зависит от вашего приложения. Если вы пишете шутер от первого лица в стиле Wolfenstein, вам может понравиться ориентированная на мир параметризация, потому что движение вперед (t_z) всегда соответствует продвижению вперед. Или вы можете интерполировать камеру через путевые точки в своей сцене, и в этом случае предпочтение отдается параметризации, ориентированной на камеру, поскольку вы можете напрямую указать положение своей камеры. Если вы не уверены, что предпочитаете, поэкспериментируйте с приведенным выше инструментом и решите, какой подход кажется наиболее естественным.
Какую параметризацию вы предпочитаете использовать, зависит от вашего приложения. Если вы пишете шутер от первого лица в стиле Wolfenstein, вам может понравиться ориентированная на мир параметризация, потому что движение вперед (t_z) всегда соответствует продвижению вперед. Или вы можете интерполировать камеру через путевые точки в своей сцене, и в этом случае предпочтение отдается параметризации, ориентированной на камеру, поскольку вы можете напрямую указать положение своей камеры. Если вы не уверены, что предпочитаете, поэкспериментируйте с приведенным выше инструментом и решите, какой подход кажется наиболее естественным.Присоединяйтесь к нам в следующий раз, когда мы будем исследовать внутреннюю матрицу, и мы узнаем, почему скрытые части вашей сцены никогда не могут быть обнаружены путем увеличения камеры. Тогда увидимся!
Сообщение от Кайл СимекОткалиброванные камеры в OpenGL без glFrustum → ← Анализ матрицы камеры, часть 1: внешняя/внутренняя декомпозиция
Включите JavaScript для просмотра комментариев на основе Disqus.
 blog комментарии на основе Disqus
blog комментарии на основе DisqusКалибровка камеры. Геометрия камеры и модель обскуры | Аэрин Ким
Геометрия камеры и модель обскуры
Калибровка камеры или резекция камеры оценивает параметры модели камеры обскуры по данной фотографии. Обычно параметры камеры-обскуры представляются в виде матрицы 3 × 4, называемой матрицей камеры. Мы используем эти параметры, чтобы оценить реальный размер объекта или определить положение камеры в мире .
Прежде чем мы поговорим о калибровке камеры, сначала вам нужно понять, как работает камера-обскура.
Зачем мне знать о камере-обскуре?
Потому что это суть работы любой камеры. Модель камеры-обскуры объясняет взаимосвязь между точкой в мире и проекцией на плоскость изображения (датчиком изображения).
Как мы проецируем точки мира на датчик камеры?
Если мы используем широко открытый датчик камеры, мы получим размытые изображения, потому что датчик изображения собирает световые лучи из нескольких точек на объекте в одном и том же месте на датчике.

Решение этой проблемы состоит в том, чтобы поставить барьер перед датчиком изображения с крошечным отверстием.
Барьер пропускает через отверстие только ограниченное количество световых лучей и снижает размытость изображения.
https://en.wikipedia.org/wiki/Depth_of_field[Пример] Реальное изображение с различными размерами апертуры
https://en.wikipedia.org/wiki/Depth_of_field#Effect_of_lens_aperture камера-обскура модель- Фокусное расстояние : расстояние между отверстием и плоскостью изображения
Влияет на размер проецируемого изображения . Влияет на камеру , фокус при использовании объективов.
2. Центр камеры: Координаты центра обскуры .
https://en.wikipedia.org/wiki/Pinhole_camera_modelМодель камеры-обскуры очень проста. Зная фокусное расстояние и центр камеры, мы можем математически рассчитать место, где луч света, отраженный от объекта, попадет на плоскость изображения.

Фокусное расстояние и центр камеры — внутренние параметры камеры , K . ( K является отраслевой нормой для выражения внутренней матрицы.)
Внутренние параметры(также известные как матрица камеры.)
внутренние параметры, K .(C x, Cy) : центр камеры в пикселях.
( fx , fy ): Фокусное расстояние в пикселях.fx = F / пикселей
fy = F / pyF : Фокусное расстояние в мировых единицах (например, в миллиметрах) .
s : Коэффициент перекоса, который отличен от нуля, если оси изображения не перпендикулярны.
s = fx tan( α)Зачем нам это?
Для того, чтобы спроецировать точку в мировом кадре на плоскость изображения камеры!
Что делать?
(Если мы говорим о беспилотных автомобилях) Для локализации беспилотных автомобилей!
Свет (отраженный от объекта) проходит из мира через апертуру камеры (отверстие) на поверхность сенсора.
Диаграмма из упрощенной проекции модели камеры Проекция на поверхность сенсора через апертуру приводит к перевернутому изображению. Чтобы избежать путаницы с переворачиванием, мы определяем плоскость виртуального изображения (желтая плоскость) перед центром камеры.
Проекция на поверхность сенсора через апертуру приводит к перевернутому изображению. Чтобы избежать путаницы с переворачиванием, мы определяем плоскость виртуального изображения (желтая плоскость) перед центром камеры.# Мировая система координат
Oworld = [Xw, Yw, Zw] # Система координат камеры
Ocamera = [Xc, Yc, Zc] # Система координат пикселей
Oimage = [u,v]We определите матрицу вращения 3 на 3 ( R ) и вектор переноса 3 на 1 ( t ) для моделирования ЛЮБОГО преобразования между мировой системой координат и другой.
Теперь мы можем сформулировать задачу проекции (Мировые координаты → Координаты изображения) как
- Мировые координаты → Координаты камеры
- Координаты камеры → Координата изображения
Oworld [Xw,Yw,Zw] → Oimage [u,v] 0? с помощью линейной алгебры!
1.
внутренние параметры, K: f для фокусного расстояния, c для центра камеры, которые являются специфическими параметрами камеры Мировые координаты → Координаты камеры Ocamera = [R|t] * Oworld 2. Координаты камеры → Координата изображения Oimage = K * Ocamera Напомните мне, что K (внутренний параметр камеры) был ?
Мировые координаты → Координаты камеры Ocamera = [R|t] * Oworld 2. Координаты камеры → Координата изображения Oimage = K * Ocamera Напомните мне, что K (внутренний параметр камеры) был ? Оба шага 1 и 2 представляют собой просто умножение матриц. Поэтому его можно переписать (объединить) как:
Oimage = P * Oworld = K[R|t] * Oworld Пусть P = K[R|t]
P как проекцияПодождите, K — (3,3)-матрица. [R|t] равно (3,4). (| означает, что вы объединяете матрицу R с вектором t .) Oworld [Xw,Yw,Zw] равно (3,1).
Тогда нельзя умножать K[R|t] (3,4) на Oworld [Xw,Yw,Zw] (3,1) !
😎 Мы можем решить эту проблему, добавив единицу в конце вектора Oworld [Xw,Yw,Zw,1], называемого однородной координатой (или проективной координатой) .

Если вы хотите дополнительно преобразовать координаты изображения в координаты пикселей: Разделите x и y на z, чтобы получить однородные координаты в плоскости изображения.
[x, y, z] -> [u, v, 1] = 1/z * [x, y, z]
Вот оно. Это ядро. Этот простой принцип проецирования будет использоваться в каждом алгоритме визуального восприятия 3D, от обнаружения объекта до реконструкции 3D-сцены.
В реальной жизни будут более сложные сценарии, например. неквадратные пиксели, перекос доступа к камере, дисторсия, неединичное соотношение сторон и т.д. Однако они меняют только матрицу камеры K , а уравнения останутся прежними.
Несколько замечаний:
а) матрица вращения ( R ) и вектор переноса ( t ) называются внешними параметрами , потому что они являются «внешними» по отношению к камере.

Вектор перевода t можно интерпретировать как положение начала координат в координатах камеры , а столбцы матрицы вращения R представляют направления мировых осей в координатах камеры . Это может быть немного запутанным для интерпретации, потому что мы привыкли думать в терминах мировых координат.
b) Обычно для восприятия в беспилотных транспортных средствах используется несколько датчиков (например, камера, лидар, радар и т. д.). Каждый датчик имеет собственные внешние параметры, определяющие преобразование кадра датчика в кадр автомобиля.
c) Координата изображения (плоскость виртуального изображения) [u, v] начинается с верхнего левого угла плоскости виртуального изображения. Вот почему мы подгоняем расположение пикселей к системе координат изображения.
Взгляните на функцию
project_ego_to_image.