На что влияет размер матрицы
На что влияет размер матрицы? Его обозначение в дюймах
Матрица или светочувствительная матрица — специализированная аналоговая или цифро-аналоговая интегральная микросхема, состоящая из светочувствительных элементов — фотодиодов.
- Предназначена для преобразования спроецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных (при наличии АЦП непосредственно в составе матрицы).
- Является основным элементом цифровых фотоаппаратов, современных видео- и телевизионных камер, фотокамер, встроенных в мобильный телефон, камер систем видеонаблюдения и многих других устройств.
- Применяется в оптических детекторах перемещения компьютерных мышей, сканерах штрих-кодов, планшетных и проекционных сканерах, системах астро- и солнечной навигации.
Обозначение матрицы характеризует геометрический размер чипа. Исторически сложилось, что маркировка матриц соответствует маркировке видиконов по внешнему диаметру с равным матрице размером чувствительной к свету области.
Рассмотрим два примера.
Первый — это матрица компактного цифрового фотоаппарата с не самой маленькой матрицей 7.2 x 5.3 mm (обозначение 1/1.8″).
Второй — матрица зеркальной камеры 23.7 x 15.6 mm (обозначение «APS-C»).
При одинаковой пиксельности (в примере, у обоих матриц 48 квадратиков-пикселей), площадь каждого пикселя у крупной матрицы больше, и соответственно, светочувствительность и цветопередача у зеркалки куда лучше. На самом деле количество квадратиков-пикселей в реальных камерах гораздо больше, (например, 6 миллионов, а не 48 как здесь).
Для обозначения крупных (больше, чем 4/3″) матриц обычно используется так называемый кроп-фактор (Kf). Это отношение диагонали пленочного кадра 24х36 мм к диагонали данной матрицы. Матрицы, у которых Kf>1 часто называются «кропнутыми» (в отличие от «полнокадровых» матриц с Kf=1). Кстати, ЭФР = Kf * ФР.
Матрицы, у которых Kf>1 часто называются «кропнутыми» (в отличие от «полнокадровых» матриц с Kf=1). Кстати, ЭФР = Kf * ФР.
Одна из важнейших характеристик, зависящих от размера матрицы — ее шумность. Так, ЦФК с матрицей APS-C (22×15 мм, Kf=1,6) позволяет устанавливать ISO в восемь раз больше, чем аппарат с матрицей 1/2.7″ (5,4х4,0 мм, Kf=6,4) при сохранении примерно одинакового уровня шумов. Отметим, что шум на изображениях также зависит от настроек повышения резкости (внутрикамерного шарпенинга) и шумоподава, поэтому матрицы одного типоразмера на разных камерах зачастую шумят по-разному.
Размер матрицы влияет и на ГРИП — чем больше матрица, тем меньше глубина резкости при равном угле зрения и одинаковом количестве пикселей. Кроме того, у больших матриц шире динамический диапазон, естественнее и натуральнее цвета.
К минусам крупной матрицы можно отнести, увеличенные размеры оптики, и рост цен. Поэтому чем более компактен аппарат и чем он дешевле, тем меньшего размера в нем установлена матрица.
Ниже приведены наиболее распространенные типоразмеры матриц в сравнении с кадром 35 мм пленки:
Размер матрицы фотоаппарата и её влияние на ГРИП
Матрица в цифровой фотокамере – это что-то вроде кадра на пленочных аппаратах. Проходящие через объектив лучи света попадают на нее и «рисуют» заданную картинку. Отличие матрицы от аналоговой технологии в том, что картинка не хранится на поверхности пленки, а записывается в память камеры в виде электронного файла.
Матрица представляет собой пластину, состоящую их фотодатчиков (пикселей). В зависимости от количества света, попадающего на пиксели, они генерируют сигнал определенной мощности. Зависимость здесь прямая: больше света – сильнее сигнал. Именно от количества этих фотодатчиков зависит размер будущей фотографии, уровень детализации изображения и наличие на картинке шумов.
Так, если матрица имеет 2592 пикселя в ширину и 1944 – в высоту, то камеру характеризуют как «пятимегапиксельную» (2592х1944=5038848).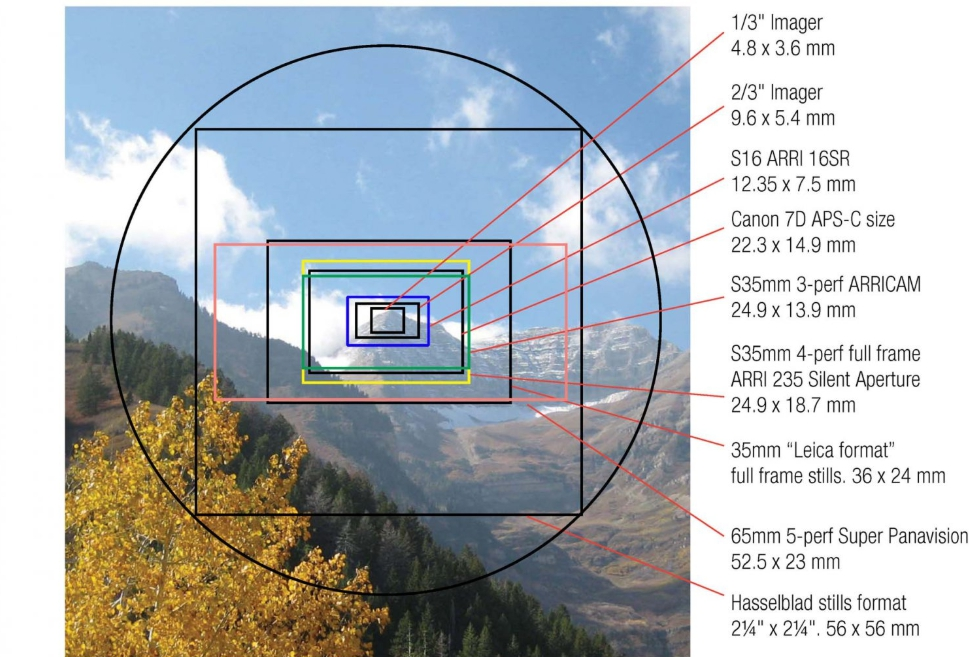 При прочих равных условиях, чем больше матрица, тем выше качество снимков.
При прочих равных условиях, чем больше матрица, тем выше качество снимков.
Таким образом, размер матрицы является одной из важнейших характеристик аппарата. Но наряду с покупателями этот факт отлично известен производителям техники. И результатом борьбы за клиента стала подмена понятий. Вместо того, что ориентироваться на физический размер матрицы, измеряемый в миллиметрах, фотолюбители смотрят исключительно на пиксельность камеры, искусственно «подогнанную» в рекламных целях.
Увеличить количество фотодатчиков можно двумя разными способами: путем увеличения матрицы или же уменьшения площади самих датчиков. Первый метод (дорогой) приводит к реальному улучшению характеристик матрицы, а второй (дешевый) – позволяет поместить на неизменной площади пластины большее количество точек. Нетрудно догадаться, какой путь для себя выбирают производители массовой фототехники.
Размеры матрицы на камерах обозначаются геометрическим размером чипа. Причем точно вычислить физический размер пластины это обозначение не позволяет, а используется для сравнения матриц между собой. Для понимания реальных габаритов следует воспользоваться небольшой «шпаргалкой».
Причем точно вычислить физический размер пластины это обозначение не позволяет, а используется для сравнения матриц между собой. Для понимания реальных габаритов следует воспользоваться небольшой «шпаргалкой».
Самые маленькие матрицы обозначаются как 1/3.2?. Физический размер их равен 3,4х4,5 миллиметров, соотношение сторон – 4:3. Используются такие матрицы в недорогих фотоаппаратах.
Матрицы с аналогичным соотношением сторон, но несколько большего размера (4х5,4 мм) маркируются как 1 / 2.7?.
1/2,5? – обозначение пластины размером 4,3х5,8 миллиметров. Эти матрицы являются самыми распространенными в камерах любительского уровня с несменной оптикой.
Матрицы 1/1,8? характеризуются геометрическими размерами 5,3х7,2 мм; 2 / 3? – 6,6х8,8 мм; 4 / 3? – 18х13,5 мм. Соотношение сторон у всех этих фотопластин составляет 4:3.
Стороны более профессиональных матриц соотносятся между собой как 3:2. Встречаются они в зеркальных цифровых камерах среднего ценового диапазона. Размер DX и APS-C матриц – 24х18 миллиметров.
Размер DX и APS-C матриц – 24х18 миллиметров.
Самые дорогие фотоаппараты оснащаются полнокадровыми или среднеформатными матрицами, габариты которых составляют 36х24 и 60х45 миллиметров соответственно.
Как уже отмечалось выше, размер матрицы оказывает влияние на несколько ключевых величин: габариты камеры, наличие шумов и ГРИП. В первом случае всё очевидно: чем больше матрица, тем больше размер фотоаппарата, больше его вес и выше стоимость.
Наличие на изображении цифровых шумов определяется, кроме размера матрицы, еще настройками камеры (повышением резкости, функцией шуподавления). Рассматривать показатель шума как отдельный показатель было бы неправильно, потому что передача его идет параллельно с основным световым сигналом на фотодатчики. Характеризовать эту величину можно только в соотношении силы сигнала к шумам.
Что касается влияния физического размера матрицы на глубину резкости (ГРИП), то здесь ситуация неоднозначна.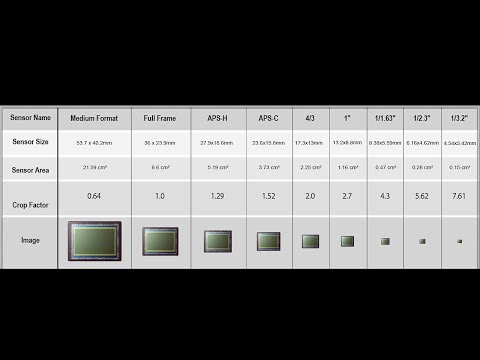 Дело в том, что сами по себе ширина и высота фотопластины не имеют принципиального значения. Глубина резкости зависит, прежде всего, от фокусного расстояния и светосильности объектива. А они, как правило, невелики на компактных камерах с маленькой матрицей. Соответственно, получение малой глубины резкости на так называемых «мыльницах» практически невозможно.
Дело в том, что сами по себе ширина и высота фотопластины не имеют принципиального значения. Глубина резкости зависит, прежде всего, от фокусного расстояния и светосильности объектива. А они, как правило, невелики на компактных камерах с маленькой матрицей. Соответственно, получение малой глубины резкости на так называемых «мыльницах» практически невозможно.
Кроме размера, матрицы различаются также по типам, наиболее распространенными из которых являются следующие три:
1) CCD-, или ПЗС-матрицы. Изначально целью изобретения этой технологии было использование ее при создании запоминающих устройств. Но способность ПЗС-матрицы получать определенный заряд в результате фотоэлектрического эффекта изменила ее основной функционал. На основе CCD работают камеры фирмы Sony и еще нескольких крупных производителей.
2) CMOS-, или КМОП-матрицы. Главной особенностью CMOS является пониженное энергопотребление, которое достигается за счет использования транзисторов. Такие матрицы используются, в основном, в тех устройствах, для которых уровень потребления электроэнергии является критичным фактором (в кадбкуляторах, например, или электронных часах).
3) LiveMOS-матрица. Впервые технология «живого» просмотра была применена компанией Olympus в 2006 году. В перечне характеристик камеры LiveMOS-матрицу обычно указывают как «Live View».
Стоит отметить, что отличия между типами матриц принципиальны только в отношении процесса их производства. Человеческому же глазу разница между ними невидна. Поэтому тип используемой матрицы должен восприниматься фотографами в качестве дополнительной информации, и не более того.
Источник: Фотокомок.ру – изучаем основы фотографии (при копировании или цитировании активная ссылка обязательна)
ПОХОЖИЕ СТАТЬИ
Что такое матричный замер?
фото от sara_winter через iStock
Современные камеры — удивительные образцы технологий. Помимо сверхбыстрой автофокусировки и автоматического замера экспозиции при съемке со вспышкой, такие функции экспозиции, как матричный замер, позволили справиться со многими сложными ситуациями при съемке.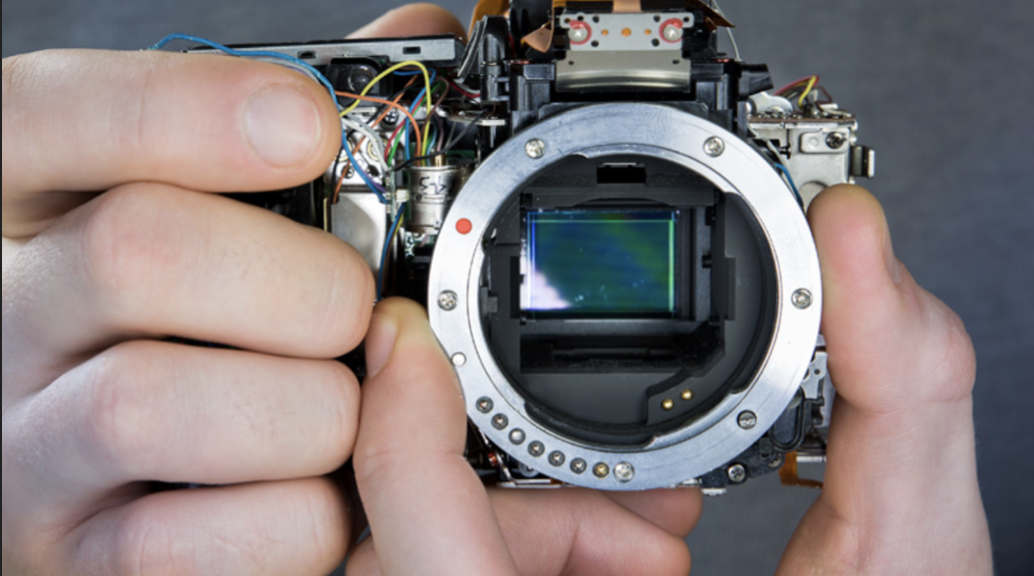
Что такое матричный замер? Почему для начинающих и более продвинутых фотографов так важно знать, как использовать матричный замер? Надежен ли матричный замер? Как мы решаем, когда использовать матричный замер?
Что такое матричный замер?фото itsskin через iStock
Когда мы смотрим на то, что такое матричный замер, полезно также знать, почему он вообще существует.
Матричный замер на камерах Nikon впервые был представлен под более информативным названием. В начале 1980-х годов компания Nikon представила камеру Nikon FA, которая стала развитием их прекрасных полуавтоматических камер FE и FE-2.
Помимо ручной настройки экспозиции и автоматизации приоритета диафрагмы, у ФА были приоритет выдержки и программная автоматизация. Это соответствовало всем другим крупным производителям камер и их автоматическим режимам.
То, что в то время было очень важным, было изменением не в том, как выполнялась автоматизация, а в том, как выполнялись измерения для этой автоматизации.
фото от oonal через iStock
Измеритель камеры, независимо от того, связан ли он с автоматизацией или нет, считывает значение освещенности сцены. В более ранних камерах измерительная ячейка (или датчик) указывала на камеру, как объектив. Лучше было бы, чтобы датчики считывали то, что проходит через объектив.
Обычно эти датчики считывают показания матового стекла в видоискателе, но иногда датчик считывает свет, отраженный от зеркала и одиннадцати, непосредственно от плоскости пленки. Простой метод заключался в том, чтобы датчик просто считывал яркость всей сцены, что означало, что все будет усреднено.
Лучшей идеей для большинства фотографов было отдать приоритет центральной области сцены. Хотя экспозиция по-прежнему усреднялась, большее значение или вес придавалось этой центральной области, отсюда и название центрально-взвешенный.
Точечный измеритель считывает только небольшую четко определенную область сцены. Во многих камерах это пятно было либо круглым, либо прямоугольным и могло иметь угол обзора 12, 5 или 1 градус. Видоискатель обычно указывал на размер пятна.
Узнать больше:- Что такое точечный замер?
- Почему важно понимать замер освещенности
фото от matejmo через iStock
В то время как центрально-взвешенный и точечный замер помогают фотографам получать хорошую экспозицию в трудночитаемых условиях освещения, например при контровом освещении, фотографы сталкиваются с гораздо более сложными ситуациями.
Две ситуации, которые вряд ли можно исправить даже с помощью точечного замера, — это сцены с большими областями белого, черного, яркого или темного. Поскольку фотометры рассчитываются для 18-процентного серого, о чем говорилось в предыдущих статьях, все, что далеко от среднего значения серого, будет смещено назад к среднему или 18-процентному серому.
Поскольку фотометры рассчитываются для 18-процентного серого, о чем говорилось в предыдущих статьях, все, что далеко от среднего значения серого, будет смещено назад к среднему или 18-процентному серому.
Некоторые примеры матричных замеров включают день на пляже или на лыжном склоне. Яркий белый снег или яркий песок будут обманывать камеру, заставляя все недоэкспонировать, что приведет к нечеткому изображению.
Точно так же сцена, заполненная очень глубокими тонами, черными или другими цветами, приведет к нечеткому виду, который камера имеет тенденцию переэкспонировать, чтобы вернуться к среднему серому.
AMP или матричный замер помогли решить эти проблемы с помощью вычислительной программы и нескольких ячеек замера, считывающих определенные части области изображения.
Как это делаетсяфото Гвенгоат через iStock
Описание того, что такое матричный замер, становится проще, когда мы видим, что это больше, чем просто считывание значений, но также их оценка или прогон их через матрицу возможных ситуаций экспозиции.
Вот где в дело вступает электроника камеры. Набор параметров, которые были предварительно запрограммированы в компьютерной памяти камеры, и значения освещенности в различных областях камеры замера сцены оцениваются, чтобы увидеть, какую компенсацию экспозиции можно сделать, чтобы получить лучшую экспозицию.
Вот почему Nikon изменил название своих камер на матричный замер, он сравнивает матрицу из тысяч примеров изображений со значениями, считанными из шаблона отдельных и отчетливых областей обзора.
Матричный замер на камерах Canon называется оценочным замером из-за того, что мозг камеры оценивает свет. Матричный замер на камерах Sony называется интеллектуальным замером, но все это описывает одно и то же.
Когда использовать матричный замерфото ZargonDesign через iStock
Вот как можно использовать матричный мастеринг, во всяком случае, с точки зрения камеры. Когда использовать матричный замер, это еще один важный момент, который нужно решить, теперь мы знаем, что такое матричный замер.
Почти все условия освещения, о которых мы говорили, освещенные сзади объекты, большие области света или тени, все, что не соответствует 18-процентному уровню серого, могут быть отрегулированы самими фотографами при оценке сцены.
Но иногда нам просто хочется сфотографироваться. Автоматический режим GreenDot — удобный режим для забавной фотосъемки, а шаблон замера по умолчанию и вычисления для этого режима обычно представляют собой матричный замер.
Матричный замер можно использовать во всех режимах экспозиции, программном автоматическом режиме, приоритете выдержки, приоритете диафрагмы и полном ручном режиме. Расчеты, выполняемые современными цифровыми камерами, удивительно точны, и многие фотографы научились доверять матричному замеру точно так же, как мы доверяем вспышке TTL и системам автофокусировки в наших камерах.
Конечно, мы также должны продолжать следить за дисплеем нашей камеры, чтобы видеть, что он нам дает, беря на себя управление, когда это необходимо, но мультишаблонный замер экспозиции чрезвычайно сложен и точен.
Зная, что такое матричный замер, а также когда и как использовать матричный замер, мы можем быть уверены, что наша экспозиция будет правильно рассчитана, либо позволяя камере делать это, либо решая это самостоятельно.
Подробнее:- Лучшие настройки камеры для пейзажной фотографии
- Лучшие настройки камеры для портретной фотографии
Лучший печатный продукт 2021 года
Попробуйте HDR со своими фотографиями
Распечатайте свои фотографии
Продай объектив
Сэкономьте $$ на объективе
Лучший ремешок для камеры
Фоны, которые вам нужны
Предложения камеры, которые вы хотите
Советы начинающим фотографам
Не знаете, что фотографировать дальше?
Примите участие в нашем 30-дневном конкурсе Creative Eye Challenge и узнайте последние секреты создания потрясающих снимков в любом месте и в любое время (с любой камеры).
Не зарегистрирован? Присоединяйтесь сегодня
Мы рекомендуем
Цвет: определение прямой матрицы для вашей камеры
Из предыдущей статьи мы поняли, что рендеринг цвета с помощью необработанного преобразования Adobe DNG по сути означает отображение необработанных данных в виде триплетов в стандартное цветовое пространство через подключение профиля Пространство в двухэтапном процессе
Первый шаг Баланс белого и демозаика необработанных данных, которые на этом этапе мы будем называть , с последующим преобразованием их в Пространство соединения профиля посредством линейной проекции с помощью неизвестной «Прямой матрицы» (как это называет DNG ) вида
(1)
с данными в виде векторов-столбцов в массиве 3xN. Определение девяти коэффициентов этой матрицы является основной темой данной статьи [1] .
Второй шаг проецирует результирующую информацию об изображении в «выходное» колориметрическое цветовое пространство, выбранное фотографом, например, sRGB или Adobe RGB. Необходимые линейные матрицы для этого преобразования стандартизированы и легко доступны в Интернете.
Необходимые линейные матрицы для этого преобразования стандартизированы и легко доступны в Интернете.
9 уравнений и 9 неизвестных
Так как же определить девять коэффициентов прямой матрицы в уравнении 1?
9 неизвестных коэффициентов работают с данными баланса белого и демозаики, чтобы линейно преобразовать их в данные. Отсюда следует, что если бы у нас было три набора значений при освещении и мы знали их соответствующие триплеты, мы могли бы найти коэффициенты. Результаты будут действительны для данного оборудования, сцены и освещения.
Например, мы могли бы зафиксировать в необработанных данных 3 пятна равномерного диффузного отражения, освещенного источником света камерой, матрицу которой мы хотим определить, таким образом получив три набора значений; затем измерьте с помощью спектрофотометра или аналогичного прибора отражательную способность 3 участков и спектральное распределение мощности источника света; и рассчитайте значения , которые подразумевают коэффициент отражения и источник света.
Все, что осталось сделать, это собрать пары 3×3 и соответствующие данные согласно уравнению (1) и умножить их. Ниже составляющих ‘s находятся неизвестные, X, Y, Z и s будут известны:
(2)
9 уравнений и 9 неизвестных обеспечивают гарантированное решение для коэффициентов относительной прямой матрицы . Выглядит легко? На самом деле это намного проще.
1 Захват, 72 уравнения
X-Rite производит ряд стандартных мишеней ColorChecker 24, информация об отражательной способности которых публикуется и хорошо изучена. В этом примере я буду использовать их удобную версию Passport Photo.
24 пятна в мишени ColorChecker несут коэффициенты отражения, которые должны быть репрезентативными для повседневных фотографических объектов, таких как кожа, листва и цвета неба. Специалисты по цвету на BabelColor.com за несколько лет измерили выборку из 30 мишеней ColorChecker и сравнили их с опубликованными спецификациями (показаны составы до ноября 2014 года, так как мое устройство старше) [2] :
Рис. 1. Средние измерения 30 мишеней ColorChecker 24 до 2015 г., сделанные BabelColor.com
1. Средние измерения 30 мишеней ColorChecker 24 до 2015 г., сделанные BabelColor.comОбратите внимание, что 1 представляет едва заметную разницу в цвете, поэтому вы можете видеть это, за исключением фиолетового и белого цветов. патчи, кажется, обеспечивают достаточно стабильную ссылку. Эта информация, а также средняя отражательная способность пятна от 380 до 730 нм с шагом 10 нм доступны в электронной таблице по соответствующей ссылке выше.
Бинго! цветовое пространство L*a*b* представляет собой простое преобразование от . С приведенными выше данными и одним необработанным захватом цели ColorChecker Passport Photo при ясном полуденном солнечном свете (назовем его D50) у нас есть 24, а не всего 3 набора триплетов необработанных и эталонных данных, необходимых для расчета коэффициентов Forward. Матрица в уравнении 1, делающая систему переопределенной. Мы можем использовать больший набор данных, чтобы убедиться, что коэффициенты соответствуют большему количеству потенциальных фотографических объектов — вот почему они называют это 9. 0006 компромисс цветовая матрица. Спуск затвора.
0006 компромисс цветовая матрица. Спуск затвора.
Вычисление коэффициентов по нормальному уравнению
Итак, теперь у нас есть цель cc24, освещенная источником примерно D50, захваченным в необработанном файле Nikon D610+24-120mm/4. Затем мы считываем средние значения в трех цветовых каналах для каждого из 24 патчей с помощью такого инструмента, как RawDigger 9.0005 [3] . Затем мы балансируем их по белому на основе третьего серого пятна справа в нейтральном нижнем ряду и демозаизируем их. Результатом стал нужный нам набор исходных данных с балансировкой белого и демозаикой, по одному триплету на патч.
Затем мы могли бы получить эталон, соответствующий каждому патчу, путем их измерения или с помощью значений ColorChecker, опубликованных X-Rite или BabelColor, как указано выше, и решить 72 уравнения для коэффициентов в матрице, которые лучше всего соответствуют доступным данным, используя нормальное уравнение. Чтобы соответствовать формату умножения матриц и уравнению (1), решение можно представить следующим образом:
Чтобы соответствовать формату умножения матриц и уравнению (1), решение можно представить следующим образом:
(3)
с представлением транспонирования, инверсии относительных массивов и данных Nx3, как вы найдете в скрипте Matlab, указанном в примечаниях. Вуаля, с помощью волшебства линейной алгебры уравнение 3 создаст компромиссную цветовую матрицу 3×3, в результате чего будет получена наименьшая сумма квадратов разностей измеренных эталонных значений для целевого объекта (если вам нужна дополнительная информация по этому вопросу, вас может заинтересовать статью о преобразовании цвета).
Однако это оказывается не лучшим способом решения, потому что метод придает одинаковый вес всем тонам, в то время как зрительная система человека имеет тенденцию быть более чувствительной в одних частях цветового пространства XYZ, чем в других.
Лучшая метрика цветового различия: dE2000
В дальнейшем я буду использовать стандартное цветовое различие (CIEDE2000) в качестве критерия минимизации. Мы можем создать электронную таблицу с 24 триплетами и 9 ячейками, представляющими коэффициенты прямой матрицы в виде массивов. Заполните коэффициенты результатом уравнения (3) выше, чтобы получить приблизительные результаты. Матрица умножьте триплеты на исходную матрицу, преобразуйте в L*a*b*, вычислите разницу с эталонными значениями на рис. 1 выше и позвольте Excel Solver выяснить, какие значения 9коэффициенты минимизации суммы разностей. Результирующая матрица будет лучшим компромиссом, найденным для 24 пятен под этим источником света, принимая во внимание цветовую чувствительность HVS, поэтому придавая каждому пятну примерно равную перцепционную значимость.
Мы можем создать электронную таблицу с 24 триплетами и 9 ячейками, представляющими коэффициенты прямой матрицы в виде массивов. Заполните коэффициенты результатом уравнения (3) выше, чтобы получить приблизительные результаты. Матрица умножьте триплеты на исходную матрицу, преобразуйте в L*a*b*, вычислите разницу с эталонными значениями на рис. 1 выше и позвольте Excel Solver выяснить, какие значения 9коэффициенты минимизации суммы разностей. Результирующая матрица будет лучшим компромиссом, найденным для 24 пятен под этим источником света, принимая во внимание цветовую чувствительность HVS, поэтому придавая каждому пятну примерно равную перцепционную значимость.
The Compromise Forward Matrix
Я эффективно следовал этой последней процедуре, но использовал Matlab/Octave вместо Excel. Если вы хотите продолжить, вы можете скачать процедуру, которую я использовал, из соответствующего примечания внизу статьи. Отличный инструментарий OptProp и его встроенные справочные данные ColorChecker протянули руку помощи [4] .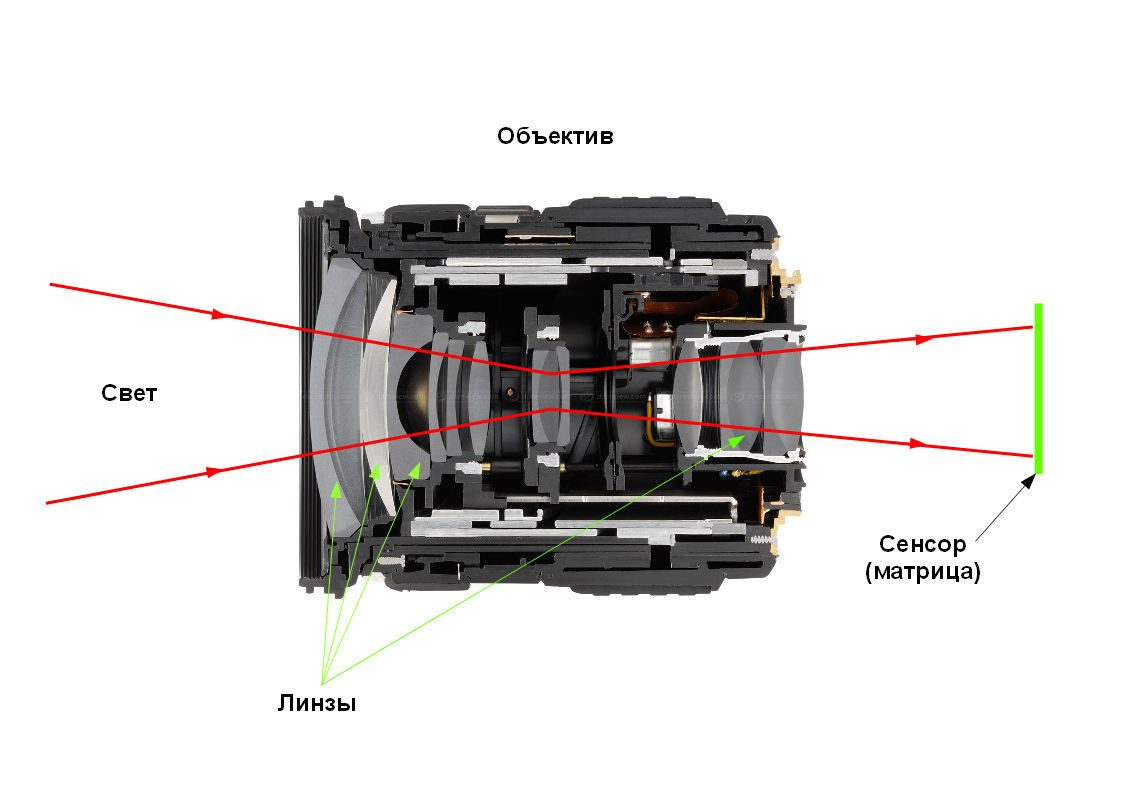 Это прямая матрица, полученная для моей установки:
Это прямая матрица, полученная для моей установки:
Круто. Это различия для каждого патча, полученные в результате преобразования с использованием эталонных данных OptProp ColorChecher.
Рисунок 3. Разница CIEDE2000 между необработанными измеренными значениями с рисунка 2, преобразованными в L*a*b* через XYZD50 с помощью вычисленной прямой матрицы и эталонных значений ColorChecker, встроенных в optprop, которые использовались для ее получения.Среднее значение – 1,5, а максимальное – 3,8 для участка со светлой кожей. Напомним, что 1 — это едва заметная разница. На этот раз я повторил упражнение, используя базу данных BabelColor 30 в качестве эталона, и вот результирующая прямая матрица, тогда:
Похоже, что различия со справочными данными из базы данных BabelColor распределены более равномерно: среднее значение по-прежнему составляет 1,5, но максимальное значение ниже 3,1 в «зеленом» патче.
Рис. 4. Разница CIEDE2000 между измеренными необработанными значениями с рис. 2, преобразованными в L*a*b* через XYZD50 с помощью вычисленной прямой матрицы и эталонных значений ColorChecker базы данных BabelColor, которые использовались для ее получения.
2, преобразованными в L*a*b* через XYZD50 с помощью вычисленной прямой матрицы и эталонных значений ColorChecker базы данных BabelColor, которые использовались для ее получения.Чтобы сделать это правильно, я должен был измерить спектральное распределение мощности источника света и отражательную способность пятен с помощью спектрофотометра примерно в то время, когда был сделан снимок (у меня его не было, X-Rite ColorMunki Photo в пути, см. пост скриптум). Использование опубликованных эталонных SPD и коэффициентов отражения загрязняет данные и способствует ухудшению результатов, но вы поняли идею.
Корректирующая матрица «Ошибки»: профили
Обратите внимание, однако, что матрица компромисса — это всего лишь компромисс, и даже если бы процедура была идеальной, это могло привести к относительно большим ошибкам. Для улучшения общей производительности цветопередачи предпочтительным методом является исправление таких ошибок с помощью дополнительных нелинейных настроек цветового профиля, которые обычно вводятся во время работы с таблицами поиска ProPhoto RGB HSV. Таблицы и методы применения обычно называются «профилями» камеры (например, ICC и DCP), что выходит за рамки данной статьи [5] .
Таблицы и методы применения обычно называются «профилями» камеры (например, ICC и DCP), что выходит за рамки данной статьи [5] .
Расчет индекса метамерии чувствительности (SMI)
Пока нет данных, мы можем рассчитать индекс метамерии чувствительности, который для нас равен 100 минус 5,5-кратное среднее (не) всего 18 цветовых пятен [6] . Показанные значения (ошибочно названные CRI выше) не обязательно максимальны для данной настройки, потому что процедура поиска матрицы построена на минимизации . Тем не менее, мой D610 с его 24-120 мм/4 вокруг D50 показывает SMI 80 в первом случае и 83 во втором. Они перескакивают на 82 и 86 соответственно, если вместо этого программа настроена на минимизацию. Неплохо, хотя я знаю, что некоторые люди не доверяют однозначным показателям, и я понимаю, почему.
Шаг 2: Матрица для вывода цветового пространства
Теперь, когда мы проделали тяжелую работу по определению прямой матрицы для преобразования необработанных данных баланса белого в PCS с этим источником света, нам нужна стандартная матрица, чтобы перейти к колориметрическому цветовое пространство, выбранное фотографом для вывода. В этом случае мы сопоставим его с помощью умножения на следующую матрицу преобразования, полученную с сайта Брюса Линдблума [7]
В этом случае мы сопоставим его с помощью умножения на следующую матрицу преобразования, полученную с сайта Брюса Линдблума [7]
. Осветитель D50ish. Мои результаты показаны вверху и внизу, а DXOmark для D610 на D50 в центре для эталона [8] :
Рисунок 5. Прямые матрицы от необработанных данных баланса белого до XYZD50 для Nikon D610+24-120/4 при освещении приблизительно D50. Вверху: матрица, рассчитанная с помощью процедуры, описанной в этой статье, из необработанных данных на рис. 2 со встроенными в optprop эталонными значениями ColorChecker. В центре: матрица DXOmark.com D50. Внизу: матрица, рассчитанная в этой статье из необработанных данных на рисунке 2 с эталонными значениями ColorChecker базы данных BabelColor 30.Довольно близко, что подтверждает, что осветитель моих снимков действительно был близок к D50.
Вот откуда берутся цветовые матрицы и зачем они нам нужны. Далее рассмотрим поближе и заставим их работать.
Post Scriptum
Я купил себе спектрофотометр X-Rite ColorMunki Photo [Редактировать: его аппаратное обеспечение должно быть идентично обновленному i1 Studio, также известному как Calibrite ColorChecker Studio], это взрыв. Он поставляется с ColorChecker Classic Mini, я полагаю, с новой формулой. Я измерил его с помощью Munki, используя открытый исходный код Spotread 9.0007 из ArgyllCMS и зафиксировали его в необработанных данных в условиях, в чем-то схожих с рис. 2. Коррелированная цветовая температура составила около 5050K. Это матрицы, полученные из него (белый баланс с моей карты WhiBal):
Он поставляется с ColorChecker Classic Mini, я полагаю, с новой формулой. Я измерил его с помощью Munki, используя открытый исходный код Spotread 9.0007 из ArgyllCMS и зафиксировали его в необработанных данных в условиях, в чем-то схожих с рис. 2. Коррелированная цветовая температура составила около 5050K. Это матрицы, полученные из него (белый баланс с моей карты WhiBal):
Довольно похоже, и SMI теперь равен 85. На самом деле, если я настрою подпрограмму на минимизацию вместо SMI, получится 86. Сумма строк в матрице XYZ должна представлять белую точку целевого источника света, которая в данном случае была просто эталонными данными для D50. Белая точка матрицы составляет [0,9609 1 0,8214], который, по словам Брюса, имеет коррелированную цветовую температуру 5016K. Хорошо, потому что у D50 CCT 5002К.
Ниже приведены различия, измеренные и полученные:
Рисунок 6. CIEDE2000, полученный с помощью ColorChecker mini, измеренный с помощью спектрофотометра ColorMunki и захваченный в необработанных данных в конце декабря на высоте около 1700 м, в 14:00, солнечный день со снегом на земле. CCT составляет около 5050К.
CCT составляет около 5050К.Сейчас среднее значение составляет 1,17, только три патча выше 2, а остальные в целом контролируются лучше. Я предполагаю, что подавление выбросов является причиной того, что линейных матриц недостаточно, а необходимы профили. Чтобы подойти еще ближе, мне нужно было взять с собой манки и измерить источник света. Ну, в следующий раз.
Примечания и ссылки
1. Как всегда, много оговорок и упрощений для ясности. Я не специалист по цвету, поэтому, если вы заметите какие-либо ошибки, сообщите мне об этом.
2. Страницы ColorChecker на BabelColor.com можно найти здесь. Обратите внимание, что в ноябре 2014 года произошли изменения в формулировках.
3. RawDigger можно найти здесь и dcraw здесь.
4. optprop можно найти здесь.
5. Пример реализации профиля см., например, в спецификации цифровых негативов Adobe версии 1.4.0.0.
6. См. здесь описание индекса метамеризма чувствительности и здесь его мнение ДХО.
7. На этой странице сайта Брюса Линдблума приведены точные матрицы от XYZD50 до многих колориметрических цветовых пространств.