Как создать эффект замедленной съёмки в бесплатном видеоредакторе
Эффект замедленной съёмки – один из наиболее популярных в сфере видеоредактирования. Он пользуется особым спросом среди владельцев экшн камер, поскольку запись часто ведётся на высокой скорости, а на итоговом видео хочется рассмотреть каждый момент. Кроме того, благодаря YouTube, мы знаем, что слоумоушн эффект способен сделать более зрелищным практически любое событие — от полёта птицы до падающих капель воды.
Если вы ищете быстрый способ создать эффект замедленной съёмки для своего ролика, ниже – простая пошаговая инструкция о том, как сделать это в бесплатном видеоредакторе VSDC. VSDC — это программа для Windows ПК, которая включает набор инструментов для работы с видео разного уровня сложности и не добавляет водяной знак при экспорте.
Скачайте и установите бесплатный видеоредактор VSDC перед началом работ
Как замедлить видео/применить слоумоушн эффект
Чтобы создать слоумоушн эффект в видео, с технической точки зрения, вам всего лишь необходимо снизить скорость проигрывания оригинальной записи. Во многих видеоредакторах заложены шаблонные настройки по замедлению видео в 2, 4, 8 и 16 раз. VSDC в этом плане несколько более продвинутый инструмент и позволяет применить любые изменения скорости, в том числе не попадающие под вышеупомянутые стандарты. Следуйте инструкции, чтобы узнать, как это работает:
Во многих видеоредакторах заложены шаблонные настройки по замедлению видео в 2, 4, 8 и 16 раз. VSDC в этом плане несколько более продвинутый инструмент и позволяет применить любые изменения скорости, в том числе не попадающие под вышеупомянутые стандарты. Следуйте инструкции, чтобы узнать, как это работает:
- Импортируйте видеофайл в редактор – он автоматически будет размещён на сцене.
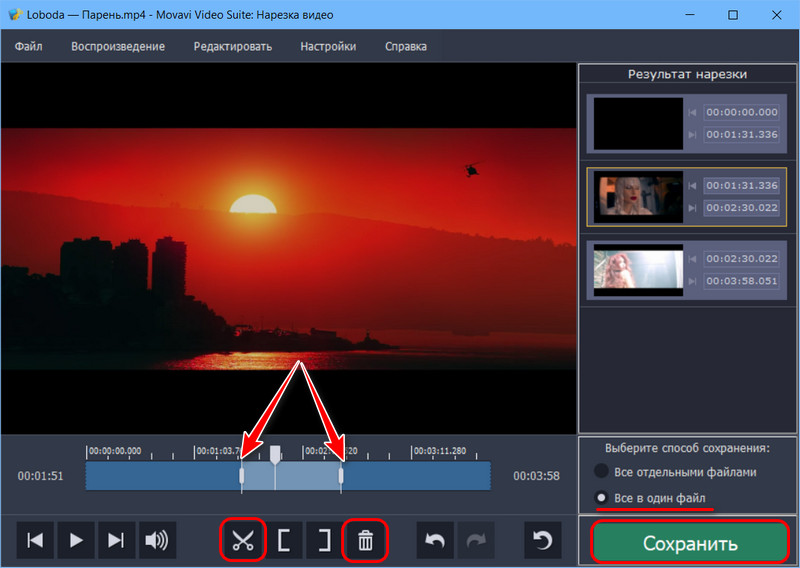
- Если вам необходимо применить slow-motion эффект только к небольшой части ролика, сперва вам понадобится разрезать видео на части, чтобы отделить фрагмент, с которым вы планируете работать. Если же вы хотите замедлить видео целиком, можете сразу перейти к шагу №4.
- Самый простой способ разделить видеофайл на части – использовать инструмент разбивки. Это небольшая иконка в виде бритвы, она находится в верхней части интерфейса программы, раздел «Удаление и разбивка». Просто поместите курсор шкалы времени на нужном моменте и нажмите на эту иконку, чтобы применить инструмент.

- Выберите фрагмент, к которому вы бы хотели применить эффект замедленной съёмки.
- Перейдите в Окно свойств справа, чтобы отредактировать скорость. (Если вы не можете найти Окно свойств, щёлкните по видеофайлу правой кнопкой мыши и выберите «Свойства»).
- Прокрутите меню вниз до параметра «Скорость %», как это показано на иллюстрации ниже.
- Снижайте скорость постепенно, проверяя результат с помощью функции предпросмотра (это красная кнопка слева над шкалой времени).
Принцип замедления видео в VSDC довольно прост. Если вы ставите значение в 50%, ролик будет проигрываться в 2 раза медленнее оригинала. Соответственно, если вы применяете значение в 25%, скорость будет снижена в 4 раза, и так далее.
Как улучшить качество эффекта слоумоушн с помощью рефрейминга
Если вы снижаете скорость проигрывания более чем на 50%, видео может начать дёргаться или мерцать.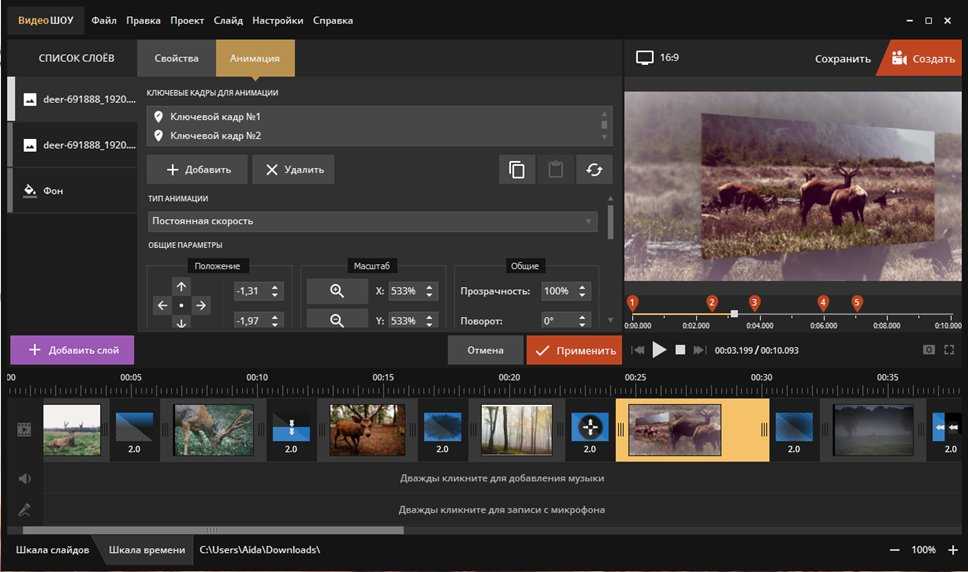 Это происходит из-за резкого уменьшения количества кадров на конкретный временной отрезок. Другими словами, когда вы снижаете скорость проигрывания более, чем в два раза, количество кадров в секунду также снижается в два раза. Видео как бы “растягивается” по времени, при том, что продолжительность показа кадров остаётся прежней. В результате, между кадрами появляются промежутки, которые и создают эффект мерцания при смене кадров. Чтобы предотвратить это, мы рекомендуем использовать рефрейминг.
Это происходит из-за резкого уменьшения количества кадров на конкретный временной отрезок. Другими словами, когда вы снижаете скорость проигрывания более, чем в два раза, количество кадров в секунду также снижается в два раза. Видео как бы “растягивается” по времени, при том, что продолжительность показа кадров остаётся прежней. В результате, между кадрами появляются промежутки, которые и создают эффект мерцания при смене кадров. Чтобы предотвратить это, мы рекомендуем использовать рефрейминг.
Нажмите на небольшой треугольник слева от настроек скорости проигрывания, чтобы открыть опции рейфрейминга.
В VSDC доступны два режима рефрейминга: Смешивание кадров и Оптический поток. Они работают на разных алгоритмах и результаты применения данных режимов будут незначительно отличаться. Как правило, Оптический поток даёт гораздо более качественное сглаживание и позволяет получить идеальный эффект даже при небольшом количестве кадров. Однако данный режим работает на основе алгоритмов ИИ, а значит, требует большого объёма ресурсов компьютера. Если вы применили Оптический поток и видите, что ваш ПК не справляется с обработкой, используйте режим Смешивание кадров.
Если вы применили Оптический поток и видите, что ваш ПК не справляется с обработкой, используйте режим Смешивание кадров.
Чтобы узнать больше о режимах рефрейминга, ознакомьтесь с подробным обзором.
Рекомендации для работы с эффектом слоумоушн
Если вы стремитесь получить идеальный эффект замедленной съёмки, есть ещё пара моментов, о которых вам стоит знать:
Во-первых, как бы вам ни нравились видео в slow motion, не стоит увлекаться этим эффектом чрезмерно. Замедлить небольшой фрагмент видео – отличная идея, однако, для зрителей сохранять внимание на продолжительных слоумошн роликах довольно сложно.
Во-вторых, когда вы применяете эффект замедленной съёмки, имейте в виду, что все изменения в ролике относятся как к видео, так и у аудио. Другими словами, замедляя видеодорожку в 2 раза, вы применяете аналогичный эффект к звуку. И возможно, в каких-то случаях это уместно, но чаще всего результат не самый удовлетворительный. Поэтому заранее продумайте, какой аудиофайл вы хотите использовать в качестве саундтрека к вашему слоумоушн видео.
Понравилась инструкция? Мы подготовили ещё три на случай, если вас интересуют аналогичные приёмы монтажа. Каждый из них абсолютно прост в применении и не требует опыта работы с видеоредактором:
- Как удалить зелёный фон с видео
- Как мгновенно создать эффект «картинка в картинке»
- Как наложить текст поверх видео и создать стильный заголовок
КАК ЗАЦИКЛИТЬ ВИДЕО НА ЮТУБЕ — пошаговая инструкция для ПК и телефона
Один, два… десять. Да бесконечно можно смотреть любимые видосики на сервисе YouTube, пуская их по кругу. Если до появления опции зацикливания нужно было морочиться со сторонними прогами, прописыванием команд в адресной строке, то теперь настроить повтор видео можно за 3-5 сек. Обучающий и развлекательный видеоролик, музыкальный трек — все это будет автоматически воспроизводиться снова и снова, пока вам не надоест. Пошаговый мануал, как это воплотить в жизнь, перед вами — пользуйтесь функцией и на ПК, и на мобильном гаджете.
Пошаговый мануал, как это воплотить в жизнь, перед вами — пользуйтесь функцией и на ПК, и на мобильном гаджете.
Полезная инфа: Компьютер не видит жесткий диск: в чем «корень зла»
На iPhone
Просто зайти на видеохостинг и пустить нужный ролик с музыкой, обзором и др. по кругу не получится. На Айфонах придется искать обходной путь, впрочем, он несложный.
- Среди установленных на смарте приложений найти и запустить Ютуб (красный квадратик с белым треугольником внутри).
- Кликнуть на значок-лупу и вписать запрос на поиск.
- Нажать на видеоролик, который нужно зациклить.
- Найти внизу и кликнуть на «плюсик» → сохранить в… → создать новый плейлист.
- Придумать имя плейлиста, указать, кто его может просматривать и сохранить.
- Закрыть видео и перейти в «Медиатеку» (значок, которой находится в нижней части экрана).
- Выбрать и запустить вновь созданный плейлист.
- Открыть меню под видео и нажать на кнопку в виде двух стрелок — это и есть кнопка, которая поставит ролик на повтор.

Перед тем, как зацикливать видео на Ютубе, используя смарты «яблочного» бренда, учтите, что в плейлист можно добавить только один ролик. Если их будет больше, то принцип воспроизведения одного видео по кругу не сработает.
Тем, кто еще в раздумьях: Что из 2 брендов лучше – смартфоны Xiaomi или iPhone
На Android
Подойдут телефоны или планшетники, работающие на этой ОС. Используем установленный на девайсе браузер, допустим, Chrome.
Чтобы быстренько зациклить видео на YouTube понадобится.
- Забить в поисковой строке адрес видеохостинга.
- Поисковик перекинет на мобильную версию Ютуба, она нам не подходит, поэтому жмем на три точки в верхней части страницы (справа, в углу).
- Должен появиться список, где будет пункт «Версия для ПК» и квадратик, который нужно отметить галочкой.
- Попадаем на Ютуб компьютерного вида.
- В верхней строке окна ввести название видосика или ключевые слова, чтобы найти нужный ролик.
- Жмем на «лупу» в поисковой строчке или стрелку (другие значки) на виртуальной клавиатуре, чтобы отправить запрос в поиск.
- Открыть видео. Ожидаем пока закончатся рекламные вставки и начнется воспроизведение ролика, нужно коснуться экрана и удерживать.
- На первом месте в появившемся перечне будет значиться «Повтор», на него и нужно нажать.
Все, теперь ролик будет после окончания не переключаться на новый, а начинаться сначала.
Интересная статья: Рейтинг смартфонов до 4000 гривен — 10 популярных моделей
На ПК
Модель, производитель, параметры, год выпуска не имеют значение.
Пошаговый алгоритм подойдет для любого компьютера.
1. В поисковой строке браузера пишем «Ютуб» → Enter.
2. Переходим на сайт видеохостинга и в верхней части экрана видим «окошко» для поиска видосиков, пишим в нем что нужно найти → Энтер или «лупа».
3. На странице с найденным роликом щелкнуть на видео (можно предварительно остановить его или сделать это прямо во время воспроизведения) правой кнопкой мыши.
Нюансы: на Magic Mouse щелкаем по правой стороне мышки, на трекпаде зажимаем правую нижнюю часть.
4. В списке будут выпадать несколько действий, выбираем и отмечаем галочкой «Повтор»/Loop.
На заметку: Как выбрать хороший компьютер для разных задач
Пересматриваем видео n-количество раз. При необходимости можно проделать 3 и 4 действие снова и отключить повтор видео на Ютубе.
Может пригодиться: Что лучше, ноутбук или компьютер (ПК)
Самое время напомнить пару нюансов процесса:
- Категорически не рекомендуем устанавливать на девайсы сторонние проги для зацикливания роликов. Они могут содержать вредоносный софт, который способен занести вирус в гаджет.
- Учтите, что проделать «фокус» с зацикливанием не получиться в мобильном приложении или mobi версии сайта Ютуб. Пока такой возможности разработчики не предусмотрели, поэтому пользуемся компьютерным форматом.
Как видим, для запуска видосика по кругу на Ютубе не нужно ничего, кроме самого телефона или ПК, а также пары секунд свободного времени.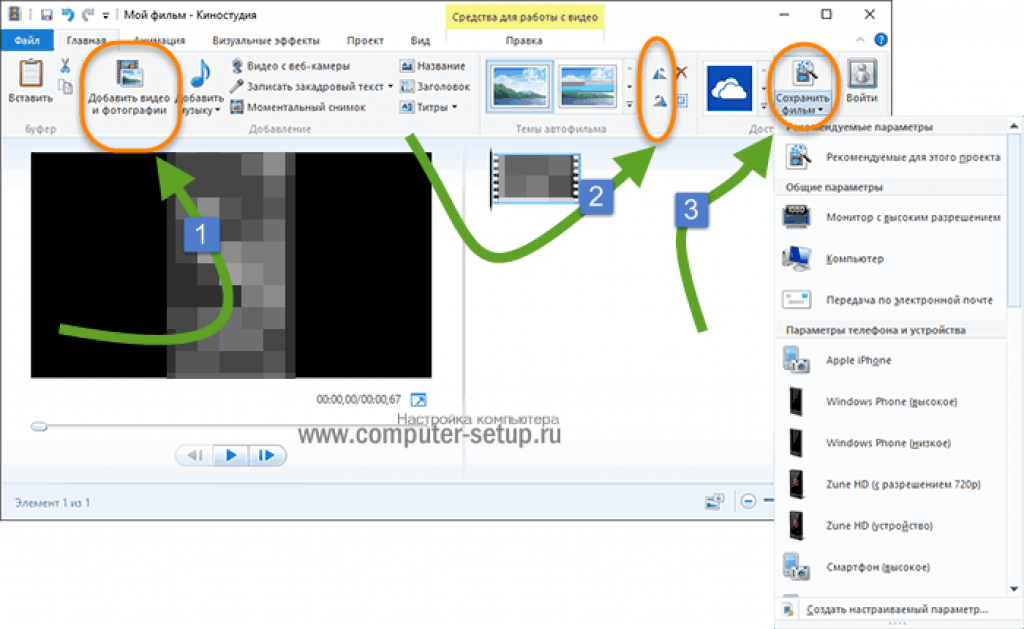
Видеоуроки по языкам программирования роботов Edison
Новое в Эдисон?
Узнайте, как подготовить робота к обучению EdVenture!
Эти два видеоролика познакомят вас с вашим роботом Edison и научат вас загружать и запускать программы в вашем роботе.
Вы также можете узнать больше о встроенных датчиках, выходах и двигателях вашего робота Edison и загрузить бесплатное руководство по началу работы с Edison, содержащее полное представление о возможностях вашего робота и пошаговое руководство по его настройке. ваше устройство для программирования весело.
Начало работы с Edison
Это видео познакомит вас с основами работы с Edison.
Как запрограммировать робота Edison
В этом видео, состоящем из двух частей, сначала показано, как загрузить программу на одном из языков программирования в робота Edison. Во второй части этого видео вы узнаете, что на самом деле происходит, когда вы загружаете программу в своего робота.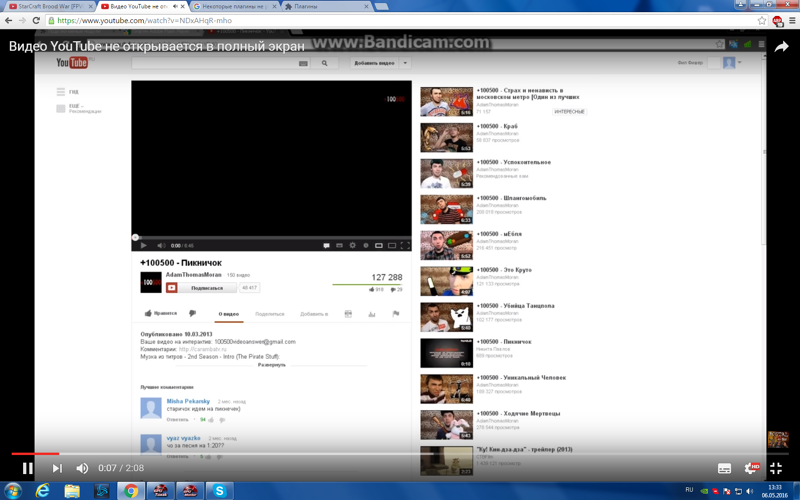
Из этих видеороликов вы узнаете, как начать работу и максимально эффективно использовать языки программирования роботов Edison.
Начало работы с EdBlocks
Давайте познакомимся с EdScratch!
Учебные пособия
Нажмите на вкладки ниже, чтобы просмотреть учебные пособия по EdScratch и EdPy.
EDSCratch Tutorials
EDScratch: Учебное пособие для блока 1
Edscratch: Учебное пособие для блока 2
Edscratch: учебник для блока 3
EDSCRATCH: Tutorial для блока 4
EDSCRACT
Учебники по EdPy
Урок 1 — Введение
В этом уроке мы рассмотрим части, из которых состоит EdPy, и создадим нашу первую программу
Урок 2 — Основы
В этом уроке мы рассмотрим основы EdPy и Python программирование
Урок 3. Циклы
В этом руководстве мы рассмотрим основы циклов в EdPy и программировании на Python
Урок 4. Переменные
В этом руководстве мы рассмотрим настройку переменных в EdPy и программирование на Python
Урок 5. Строки настройки
Строки настройки
В этом руководстве мы рассмотрим настройку строк настройки в EdPy и программировании на Python.
Урок 6. Чтение значений датчиков
EdPy и программирование на Python
Урок 7 — If и Else
В этом руководстве мы рассмотрим ветвление программы с помощью If и else в EdPy и программирование на Python
Урок 8 — Функции
В этом руководстве мы рассмотрим создание функций в EdPy и программирование на Python
Урок 9. События и прерывания
В этом уроке мы рассмотрим создание прерываний на основе событий в EdPy.
Урок 10. Объекты и классы
В этом руководстве мы рассмотрим создание объектов и классов в EdPy и программировании на Python
Ищете EdWare? EdWare был исходным языком для робота Эдисона. С тех пор EdWare был упразднен, его заменили три других языка: EdBlocks, EdScratch и EdPy. Вы по-прежнему можете получить доступ к информации об EdWare здесь.
EdCreate Видеоролики EdBuild
В этой серии видеороликов показаны пошаговые инструкции по созданию каждого из пяти EdBuild.
Пошаговые видео-гиды
Давайте построим Edtank
Let’s Eddigger
Давайте построим Edroboclaw
Let’s построить Edcrane
Видео Пятница: Роботы ночью
Мы думаем, что дополнительные роботизированные конечности могут стать новой формой усовершенствования человека, улучшая способности людей выполнять задачи, которые они уже могут выполнять, а также расширяя их возможности делать то, что они просто не могут делать с помощью своих естественных человеческих тел. Если бы люди могли легко добавить и управлять третьей рукой, или третьей ногой, или еще несколькими пальцами, они, вероятно, использовали бы их в задачах и действиях, выходящих за рамки упомянутых здесь сценариев, открывая новые модели поведения, которые мы даже не можем себе представить. .
Уровни аугментации человека
Роботизированные конечности прошли долгий путь за последние десятилетия, и некоторые из них уже используются людьми для улучшения своих способностей. Большинство из них управляются с помощью джойстика или другого ручного управления. Например, именно так рабочие на производственных линиях владеют механическими конечностями, которые удерживают компоненты продукта и манипулируют ими. Точно так же хирурги, выполняющие роботизированные операции, сидят за консолью через комнату от пациента. В то время как хирургический робот может иметь четыре руки с разными инструментами, руки хирурга могут управлять только двумя из них одновременно. Можем ли мы дать этим хирургам возможность управлять четырьмя инструментами одновременно?
Большинство из них управляются с помощью джойстика или другого ручного управления. Например, именно так рабочие на производственных линиях владеют механическими конечностями, которые удерживают компоненты продукта и манипулируют ими. Точно так же хирурги, выполняющие роботизированные операции, сидят за консолью через комнату от пациента. В то время как хирургический робот может иметь четыре руки с разными инструментами, руки хирурга могут управлять только двумя из них одновременно. Можем ли мы дать этим хирургам возможность управлять четырьмя инструментами одновременно?
Роботизированные конечности также используются людьми, перенесшими ампутацию или паралич. Это включает людей в инвалидных колясках с электроприводом управление роботизированной рукой с помощью джойстика кресла, а те, у кого отсутствуют конечности, управляют протезом с помощью оставшихся мышц. Но по-настоящему управляемый разум протез — большая редкость.
Если бы люди могли легко добавить и контролировать третью руку, они, вероятно, использовали бы ее в новых действиях, которые мы даже не можем себе представить.
Пионерами в области протезов, управляемых мозгом, стали люди с тетраплегии, которые часто парализованы ниже шеи. Некоторые из этих людей смело вызвались участвовать в клинических испытаниях мозговых имплантатов, которые позволяют им управлять роботизированной конечностью одной лишь мыслью, отдавая мысленные команды, заставляющие роботизированную руку подносить напиток к их губам или помогая с другими задачами повседневной жизни. Эти системы относятся к категории интерфейсов мозг-машина (ИМТ). Другие добровольцы использовали технологии BMI для управления компьютерными курсорами, позволяя им печатать сообщения, просматривать Интернет и многое другое. Но большинству этих систем ИМТ требуется операция на головном мозге, чтобы вставить нейронный имплантат, и они включают в себя оборудование, которое выступает из черепа, что делает их подходящими только для использования в лаборатории.
Увеличение человеческого тела можно рассматривать как имеющее три уровня. Первый уровень увеличивает существующую характеристику, как, скажем, экзоскелет с электроприводом. дать владельцу суперсилу. Второй уровень дает человеку новую степень свободы, например, возможность двигать третьей рукой или шестым пальцем, но за это приходится платить — например, если дополнительный придаток управляется ножной педалью, пользователь жертвует обычной подвижностью. ноги для управления системой управления. Третий уровень аугментации, технологически наименее зрелый, дает пользователю дополнительную степень свободы, не лишая подвижности любую другую часть тела. Такая система позволит людям нормально использовать свое тело, используя некоторые неиспользуемые нейронные сигналы для управления роботизированной конечностью. Это уровень, который мы изучаем в нашем исследовании.
дать владельцу суперсилу. Второй уровень дает человеку новую степень свободы, например, возможность двигать третьей рукой или шестым пальцем, но за это приходится платить — например, если дополнительный придаток управляется ножной педалью, пользователь жертвует обычной подвижностью. ноги для управления системой управления. Третий уровень аугментации, технологически наименее зрелый, дает пользователю дополнительную степень свободы, не лишая подвижности любую другую часть тела. Такая система позволит людям нормально использовать свое тело, используя некоторые неиспользуемые нейронные сигналы для управления роботизированной конечностью. Это уровень, который мы изучаем в нашем исследовании.
Расшифровка электрических сигналов мышц
Аугментация человека третьего уровня может быть достигнута с помощью инвазивных имплантатов ИМТ, но для повседневного использования нам нужен неинвазивный способ получать команды мозга снаружи черепа. Для многих исследовательских групп это означает полагаться на проверенные временем
технология электроэнцефалографии (ЭЭГ), которая использует электроды на коже головы для улавливания сигналов мозга.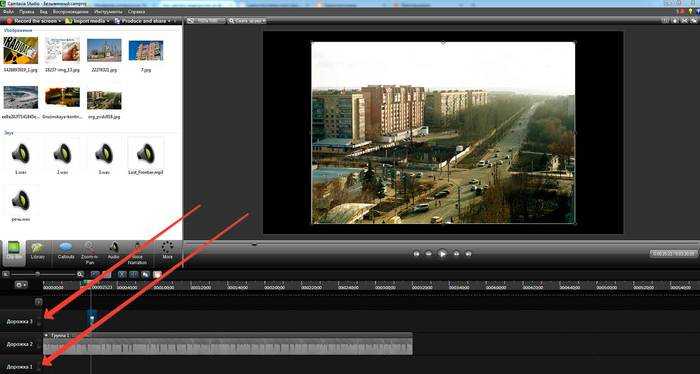 Наши группы работают над этим подходом, но мы также изучаем другой метод: использование сигналов электромиографии (ЭМГ), производимых мышцами. Мы потратили более десяти лет на изучение того, как электроды ЭМГ на поверхности кожи могут обнаруживать электрические сигналы от мышц, которые мы затем можем расшифровать, чтобы выявить команды, посылаемые спинальными нейронами.
Наши группы работают над этим подходом, но мы также изучаем другой метод: использование сигналов электромиографии (ЭМГ), производимых мышцами. Мы потратили более десяти лет на изучение того, как электроды ЭМГ на поверхности кожи могут обнаруживать электрические сигналы от мышц, которые мы затем можем расшифровать, чтобы выявить команды, посылаемые спинальными нейронами.
Электрические сигналы — это язык нервной системы. По всему мозгу и периферическим нервам нейрон «загорается», когда внутри клетки накапливается определенное напряжение — несколько десятков милливольт, и оно вызывает передачу потенциала действия вниз по его аксону, высвобождая нейротрансмиттеры в соединениях или синапсах с другими нейронами. , и потенциально запуская эти нейроны по очереди. Когда такие электрические импульсы генерируются моторным нейроном в спинном мозге, они проходят по аксону, который достигает мышцы-мишени, где они пересекают специальные синапсы с отдельными мышечными волокнами и заставляют их сокращаться. Мы можем записывать эти электрические сигналы, которые кодируют намерения пользователя, и использовать их для различных целей управления.
Мы можем записывать эти электрические сигналы, которые кодируют намерения пользователя, и использовать их для различных целей управления.
Однако расшифровка отдельных нейронных сигналов на основе того, что можно прочитать с помощью поверхностной ЭМГ, — непростая задача. Типичная мышца получает сигналы от сотен спинномозговых нейронов. Более того, каждый аксон разветвляется в мышце и может соединяться с сотней или более отдельных мышечных волокон, распределенных по всей мышце. Поверхностный ЭМГ-электрод улавливает выборку этой какофонии импульсов.
Прорыв в области неинвазивных нейронных интерфейсов произошел с открытием в 2010 году того, что сигналы, улавливаемые ЭМГ высокой плотности, при которой к коже крепятся от десятков до сотен электродов,
можно распутать, предоставляя информацию о командах, посылаемых отдельными двигательными нейронами в позвоночнике. Такая информация ранее была получена только с помощью инвазивных электродов в мышцах или нервах. Наши поверхностные электроды с высокой плотностью обеспечивают хорошую выборку в нескольких местах, что позволяет нам идентифицировать и расшифровывать активность относительно большой части спинномозговых мотонейронов, участвующих в задаче. И теперь мы можем делать это в режиме реального времени, что говорит о том, что мы можем разрабатывать неинвазивные системы ИМТ, основанные на сигналах от спинного мозга.
И теперь мы можем делать это в режиме реального времени, что говорит о том, что мы можем разрабатывать неинвазивные системы ИМТ, основанные на сигналах от спинного мозга.
Типичная мышца получает сигналы от сотен спинномозговых нейронов.
Текущая версия нашей системы состоит из двух частей: обучающего модуля и модуля декодирования в реальном времени. Для начала, с прикрепленной к коже сеткой электродов ЭМГ, пользователь выполняет легкие сокращения мышц, и мы передаем записанные сигналы ЭМГ в тренировочный модуль. Этот модуль выполняет сложную задачу идентификации импульсов отдельных двигательных нейронов (также называемых спайками), которые составляют сигналы ЭМГ. Модуль анализирует, как связаны сигналы ЭМГ и предполагаемые нейронные спайки, которые он суммирует в наборе параметров, которые затем можно использовать с гораздо более простым математическим рецептом для преобразования сигналов ЭМГ в последовательности спайков от отдельных нейронов.
Имея эти параметры, модуль декодирования может принимать новые сигналы ЭМГ и извлекать активность отдельных двигательных нейронов в режиме реального времени. Учебный модуль требует большого количества вычислений и будет слишком медленным для самостоятельного управления в реальном времени, но обычно его нужно запускать только один раз каждый раз, когда электродная сетка ЭМГ закрепляется на месте пользователя. Напротив, алгоритм декодирования очень эффективен, с задержками всего несколько миллисекунд, что является хорошим предзнаменованием для возможных автономных носимых систем BMI. Мы подтвердили точность нашей системы, сравнив ее результаты с сигналами, полученными одновременно двумя инвазивными электродами ЭМГ, введенными в мышцу пользователя.
Учебный модуль требует большого количества вычислений и будет слишком медленным для самостоятельного управления в реальном времени, но обычно его нужно запускать только один раз каждый раз, когда электродная сетка ЭМГ закрепляется на месте пользователя. Напротив, алгоритм декодирования очень эффективен, с задержками всего несколько миллисекунд, что является хорошим предзнаменованием для возможных автономных носимых систем BMI. Мы подтвердили точность нашей системы, сравнив ее результаты с сигналами, полученными одновременно двумя инвазивными электродами ЭМГ, введенными в мышцу пользователя.
Использование дополнительной полосы пропускания в нейронных сигналах
Разработка этого метода извлечения сигналов от спинальных двигательных нейронов в режиме реального времени была ключом к нашей настоящей работе по управлению дополнительными роботизированными конечностями. Изучая эти нейронные сигналы, мы заметили, что они, по сути, имеют дополнительную полосу пропускания. Низкочастотная часть сигнала (примерно ниже 7 герц) преобразуется в мышечную силу, но сигнал также содержит компоненты на более высоких частотах, например, в бета-диапазоне от 13 до 30 Гц, которые слишком высоки, чтобы контролировать мышцы и, кажется, не используются. Мы не знаем, почему спинные нейроны посылают эти высокочастотные сигналы; возможно, избыточность является буфером на случай новых условий, требующих адаптации. Какой бы ни была причина, люди развили нервную систему, в которой сигнал, исходящий из спинного мозга, содержит гораздо больше информации, чем необходимо для управления мышцами.
Мы не знаем, почему спинные нейроны посылают эти высокочастотные сигналы; возможно, избыточность является буфером на случай новых условий, требующих адаптации. Какой бы ни была причина, люди развили нервную систему, в которой сигнал, исходящий из спинного мозга, содержит гораздо больше информации, чем необходимо для управления мышцами.
Это открытие заставило нас задуматься о том, что можно сделать с запасными частотами. В частности, мы задавались вопросом, можем ли мы взять эту постороннюю нейронную информацию и использовать ее для управления роботизированной конечностью. Но мы не знали, смогут ли люди добровольно управлять этой частью сигнала отдельно от той части, которую они использовали для управления своими мышцами. Поэтому мы разработали эксперимент, чтобы выяснить это.
В нашем первом эксперименте по проверке концепции добровольцы пытались использовать свои запасные нейронные способности для управления компьютерными курсорами. Установка была простой, хотя нейронный механизм и задействованные алгоритмы были сложными. Каждый доброволец сидел перед экраном, и мы поместили ему на ногу систему ЭМГ с 64 электродами в виде лоскута размером 4 на 10 сантиметров, прикрепленного к их голени поверх бедра.
передняя большеберцовая мышца, которая при сокращении сгибает стопу вверх. Большеберцовая мышца была рабочей лошадкой для наших экспериментов: она занимает большую площадь рядом с кожей, а ее мышечные волокна ориентированы вдоль ноги, что в совокупности делает ее идеальной для расшифровки активности спинальных мотонейронов, иннервирующих ее.
Каждый доброволец сидел перед экраном, и мы поместили ему на ногу систему ЭМГ с 64 электродами в виде лоскута размером 4 на 10 сантиметров, прикрепленного к их голени поверх бедра.
передняя большеберцовая мышца, которая при сокращении сгибает стопу вверх. Большеберцовая мышца была рабочей лошадкой для наших экспериментов: она занимает большую площадь рядом с кожей, а ее мышечные волокна ориентированы вдоль ноги, что в совокупности делает ее идеальной для расшифровки активности спинальных мотонейронов, иннервирующих ее.
Вот некоторые результаты эксперимента, в котором низкочастотные и высокочастотные нейронные сигналы соответственно управляли горизонтальным и вертикальным движением компьютерного курсора. Цветные эллипсы (со знаком плюс в центре) показывают целевые области. На трех верхних диаграммах показаны траектории (каждая начинается в левом нижнем углу), достигнутые для каждой цели в трех испытаниях одним пользователем. Внизу точками обозначены позиции, достигнутые в ходе многих испытаний и пользователей. Цветными крестами отмечены средние позиции и диапазон результатов для каждой цели. Источник: M. Bräcklein et al., Journal of Neural Engineering
Внизу точками обозначены позиции, достигнутые в ходе многих испытаний и пользователей. Цветными крестами отмечены средние позиции и диапазон результатов для каждой цели. Источник: M. Bräcklein et al., Journal of Neural Engineering
Мы попросили наших добровольцев неуклонно сокращать большеберцовую мышцу, удерживая ее в напряжении, и на протяжении всего эксперимента мы наблюдали за изменениями в извлеченных нейронных сигналах. Мы разделили эти сигналы на низкие частоты, которые контролировали сокращение мышц, и запасные частоты около 20 Гц в бета-диапазоне, и мы связали эти два компонента соответственно с горизонтальным и вертикальным управлением курсором на экране компьютера. Мы просили добровольцев попробовать перемещать курсор по экрану, охватывая все части пространства, но не объясняли, да и не могли им объяснить, как это сделать. Им приходилось полагаться на визуальную обратную связь о положении курсора и позволить своему мозгу понять, как заставить его двигаться.
Примечательно, что, не зная точно, что они делают, эти добровольцы справились с заданием за считанные минуты, водя курсором по экрану, хотя и неуверенно. Начав с одного нервного командного сигнала — сокращения передней большеберцовой мышцы — они научились вырабатывать второй сигнал для управления вертикальным движением компьютерного курсора независимо от мышечного управления (которое направляло горизонтальное движение курсора). Мы были удивлены и взволнованы тем, как легко они сделали этот большой первый шаг к обнаружению канала нейронного контроля, отдельного от естественных двигательных задач. Но мы также увидели, что управление было недостаточно точным для практического использования. Нашим следующим шагом будет выяснить, можно ли получить более точные сигналы и могут ли люди использовать их для управления роботизированной конечностью, выполняя при этом независимые естественные движения.
Нам также интересно узнать больше о том, как мозг выполняет такие действия, как управление курсором. В недавнем исследовании с использованием варианта задачи с курсором мы одновременно использовали ЭЭГ, чтобы увидеть, что происходит в мозгу пользователя, особенно в области, связанной с произвольным контролем движений. Мы были рады обнаружить, что изменения, происходящие с дополнительными нейронными сигналами бета-диапазона, поступающими в мышцы, были тесно связаны с аналогичными изменениями на уровне мозга. Как уже упоминалось, бета-нейронные сигналы остаются чем-то вроде загадки, поскольку они не играют известной роли в управлении мышцами, и даже неясно, откуда они берутся. Наш результат предполагает, что наши добровольцы учились модулировать мозговую активность, которая посылалась в мышцы в виде бета-сигналов. Это важное открытие помогает нам разгадать потенциальные механизмы, лежащие в основе этих бета-сигналов.
В недавнем исследовании с использованием варианта задачи с курсором мы одновременно использовали ЭЭГ, чтобы увидеть, что происходит в мозгу пользователя, особенно в области, связанной с произвольным контролем движений. Мы были рады обнаружить, что изменения, происходящие с дополнительными нейронными сигналами бета-диапазона, поступающими в мышцы, были тесно связаны с аналогичными изменениями на уровне мозга. Как уже упоминалось, бета-нейронные сигналы остаются чем-то вроде загадки, поскольку они не играют известной роли в управлении мышцами, и даже неясно, откуда они берутся. Наш результат предполагает, что наши добровольцы учились модулировать мозговую активность, которая посылалась в мышцы в виде бета-сигналов. Это важное открытие помогает нам разгадать потенциальные механизмы, лежащие в основе этих бета-сигналов.
Тем временем в Имперском колледже Лондона мы создали систему для тестирования этих новых технологий с дополнительными роботизированными конечностями, которую мы называем
Виртуальная среда с несколькими конечностями, или MUVE. Помимо других возможностей, MUVE позволит пользователям работать с четырьмя легкими носимыми роботами-манипуляторами в сценариях, имитируемых виртуальной реальностью. Мы планируем сделать систему открытой для использования другими исследователями по всему миру.
Помимо других возможностей, MUVE позволит пользователям работать с четырьмя легкими носимыми роботами-манипуляторами в сценариях, имитируемых виртуальной реальностью. Мы планируем сделать систему открытой для использования другими исследователями по всему миру.
Следующие шаги в аугментации человека
Подключение нашей технологии управления к манипулятору или другому внешнему устройству — естественный следующий шаг, и мы активно преследуем эту цель. Настоящая проблема, однако, будет заключаться не в подключении оборудования, а в выявлении нескольких источников управления, достаточно точных для выполнения сложных и точных действий с частями тела робота.
Мы также изучаем, как технология повлияет на нейронные процессы людей, которые ее используют. Например, что произойдет после того, как кто-то получит шестимесячный опыт использования дополнительной роботизированной руки? Позволит ли естественная пластичность мозга им адаптироваться и получить более интуитивный контроль? Человек, рожденный с шестипалыми руками, может иметь
полностью развитые области мозга, предназначенные для управления дополнительными пальцами, что приводит к исключительным способностям к манипулированию. Может ли пользователь нашей системы со временем развить сопоставимую ловкость? Нам также интересно, какая когнитивная нагрузка будет связана с управлением дополнительной конечностью. Если люди могут направлять такую конечность только тогда, когда они сосредоточены на ней в лабораторных условиях, эта технология может оказаться бесполезной. Однако, если пользователь может случайно использовать дополнительную руку при выполнении повседневных задач, таких как приготовление бутерброда, то это будет означать, что технология подходит для повседневного использования.
Может ли пользователь нашей системы со временем развить сопоставимую ловкость? Нам также интересно, какая когнитивная нагрузка будет связана с управлением дополнительной конечностью. Если люди могут направлять такую конечность только тогда, когда они сосредоточены на ней в лабораторных условиях, эта технология может оказаться бесполезной. Однако, если пользователь может случайно использовать дополнительную руку при выполнении повседневных задач, таких как приготовление бутерброда, то это будет означать, что технология подходит для повседневного использования.
Какой бы ни была причина, люди развили нервную систему, в которой сигнал, исходящий из спинного мозга, содержит гораздо больше информации, чем необходимо для управления мышцами.
Другие исследовательские группы занимаются теми же вопросами нейронауки. Некоторые экспериментируют с механизмами контроля, включающими ЭЭГ на основе скальпа или нейронные имплантаты, в то время как другие работают с мышечными сигналами.