Иллюстрированный самоучитель по Adobe Audition 1.5 › Корректируем спектр и преобразуем стереополе › Notch Filter [страница — 96] | Самоучители по средствам мультимедиа
Notch Filter
Notch Filter – многополосный фильтр выреза.
Фильтр, окно которого Notch Filter (рис. 6.8), открывается командой Effects › Filters › Notch Filter, предназначен для подавления нежелательных узкополосных составляющих в спектре сигнала. Он особенно полезен для подавления фоновых составляющих с частотой промышленной электрической сети (50 Гц) и гармоник этой частоты, образующихся в результате нелинейных преобразований.
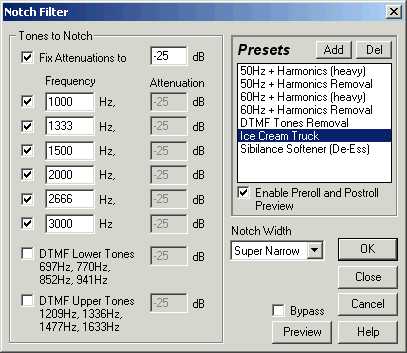
Рис. 6.8. Диалоговое окно Notch Filter
В группе Tones to Notch можно выбрать значение частоты (Frequency) и степень подавления (Attenuation) для каждой из подавляемых составляющих спектра.
Флажки DTMF Lower Tones и DTMF Upper Tones – включение/отключение режима подавления спектральных составляющих на частотах, стандартных для системы тонального набора номера телефона. Степень подавления можно выбрать отдельно для каждой группы низкочастотных и высокочастотных тонов.
Если флажок Fix Attenuations to установлен, то для всех частот уровень ослабления будет одинаковым (вводится в соответствующем поле). Если этот флажок сброшен, то есть возможность выбрать индивидуальные уровни ослабления каждой частоты.
В раскрывающемся списке Notch Width вы можете выбрать порядок фильтра [12] и, тем самым, ширину полосы его пропускания: узкую (Narrow), очень узкую (Very Narrow) или супер узкую (Super Narrow). Рекомендуемые значения степени подавления для:
- Narrow – не более 30 дБ;
- Very Narrow – не более 60 дБ;
- Super Narrow – не более 90 дБ.
В списке Presets содержатся следующие предустановки:
- 50 Hz + Harmonics (heavy) , 50 Hz + Harmonics Removal – варианты фильтров подавления фоновой составляющей от сети 50 Гц и пяти гармоник этой частоты;
- 60 Hz + Harmonics (heavy), 60 Hz + Harmonics Removal – варианты фильтров подавления фоновой составляющей от сети 60 Гц и пяти гармоник этой частоты;
- DTMF Tones Removal – фильтр подавления спектральных составляющих на стандартных частотах системы тонального набора номера телефона;
- Ice Cream Truck – фильтр, значительно (на 25 дБ) поднимающий уровень спектральных составляющих с частотами 1000, 1333, 1500, 2000, 2666 Гц и 3000 Гц;
- Sibilance Softener (De-Ess) – вариант фильтра деэсера.
Предпоследний из вариантов фильтров представляет особый интерес и нуждается в пояснениях. По своему назначению каждый из элементов такого фильтра напоминает контур ударного возбуждения, обладающий высокой добротностью. При поступлении на такой контур короткого импульса или даже небольшого по амплитуде колебания, частота которого совпадает с резонансной частотой контура, в нем возбуждаются колебания большой амплитуды, которые долго не затухают.
Сигнал, имеющий богатый спектр (например, речь человека), в результате обработки таким фильтром приобретает мелодический характер: появляется то затухающий, то вновь возрождающийся призвук, напоминающий звучание аккорда До мажор. В этом нет ничего удивительного, ибо частоты настройки элементов фильтра, который в списке предустановок называется Ice Cream Truck, находятся приблизительно в тех же соотношениях, что и частоты звуков До, Ми, Соль.
Рассматриваемое окно фильтра носит название Notch Filter. По смыслу этого названия фильтр должен только подавлять определенные частоты. Но пресет Ice Cream Truck совершенно не укладывается в эту логику. Здесь не подавляются, а, наоборот, подчеркиваются определенные частоты. Это привело нас к мысли, что Notch Filter обладает неочевидными свойствами, о которых ничего не сказано в руководстве пользователя. После непродолжительных экспериментов с фильтром стало ясно, что характер фильтра (ослабление или усиление частотных составляющих сигнала) зависит от знака параметра, который вводится в полях Attenuation. Если ввести, например, 25 дБ, тогда программа воспримет такой ввод, как: «Подавить частотную составляющую на 25 дБ». Если ввести -25 дБ, это трактуется как подавление составляющей на -25 дБ, что эквивалентно указанию повысить уровень частотной составляющей на 25 дБ.
Если взять в качестве обрабатываемого аудиофайла запись шума, то с помощью фильтра Notch Filter можно синтезировать звук, с любым распределением пяти спектральных составляющих. Поскольку шум является широкополосным процессом, в его спектре присутствуют составляющие с любыми частотами (во всяком случае, в пределах от единиц герц до десятков килогерц), то всегда найдется частота, которую можно выделить фильтром
samoychiteli.ru
Полосно-заграждающий фильтр — Википедия
Материал из Википедии — свободной энциклопедии
Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 12 марта 2013; проверки требуют 4 правки. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной 12 марта 2013; проверки требуют 4 правки.Режекторный фильтр (проф. жаргон — полосно-заграждающий фильтр, фильтр-пробка) — электронный или любой другой фильтр, не пропускающий колебания некоторой определённой полосы частот, и пропускающий колебания с частотами, выходящими за пределы этой полосы. Эта полоса подавления характеризуется шириной полосы задерживания и расположена приблизительно вокруг центральной частоты ω0 (рад/с) подавления, или fо=ω0/2•3,14 (Гц). Для реальной амплитудно-частотной характеристики частоты ω L и ωU представляют собой нижнюю и верхнюю частоты полосы задерживания. Режекторный фильтр, предназначенный для подавления составляющей одной определённой частоты, называется фильтром-пробкой (англ. notch filter).
См. также[
ru.wikipedia.org
Голографические нотч и супер-нотч фильтры
Голографические нотч-фильтры (ГНФ) представляют собой уникальные объемные голограммы, обеспечивающие сильное подавление лазерного излучения в очень узкой полосе частот. Они идеально подходят для лазерной спектроскопии рамановского рассеяния, позволяя регистрировать стоксовые и анти-стоксовые линии с точностью до нескольких десятков волновых чисел от лазерной длины волны.
ГНФ изготавливаются методом создания интерференционной картины, получаемой с помощью лазерного луча, в слое дихромата желатина, помещенного между двумя стеклянными пластинами. Они имеют неоспоримые преимущества перед узкополосными интерференционными фильтрами, изготавливаемыми с помощью вакуумного напыления нескольких тонких диэлектрических слоев с различными показателями преломления. Во-первых, ГНФ обеспечивают подавление излучения в более узкой полосе частот, не вырезая полезную часть спектра вблизи лазерной линии. Во-вторых, у них отсутствует вторичное отражение излучения, которое характерно для диэлектрических интерференционных фильтров.
Мы производим различные виды ГНФ с превосходными оптическими характеристиками. В зависимости от параметров их можно разделить на 4 типа (см. таблицу).
Табл. 1 Типы ГНФ.
| НОТЧ -4 | НОТЧ -6 | СУПЕР НОТЧ -4 |
СУПЕР НОТЧ -6 |
|
| Коэффициент подавления лазерного излучения: оптическая плотность OD, усредненная по всей апертуре |
> 4.0 |
> 6.0 |
> 4.0 |
> 6.0 |
|
Спектральная ширина |
< 500 |
< 350 |
||
| Спектральная ширина крыльев (стоксовская ветвь): в волновых числах между точками с OD 0.3 и 4.0, см-1 |
< 250 |
< 120 |
||
|
Рабочий спектральный диапазон, нм |
400-1200 | 450-1200 | 450-1200 | |
| Стандартные длины волн, нм |
441.6, 457.9, 476.7, 488.0, 514.5, 532.0, 568.2, 632.8, 647.1, 752.5, 785.0, 1064.0 | 488.0, 514.5, 532.0, 568.2, 632.8, 647.1, 752.5, 785.0, 1064.0 | ||
| Лучевая прочность: — непрерывный режим, Вт/см2 — импульсный режим ( t =10 нс), Дж/см2 |
10 0.5 |
|||
| Чистая апертура фильтра: — стандартная апертура, мм — максимальная апертура, мм |
25.4 70 |
|||
| Стабильность к условиям эксплуатации: | ||||
| гарантированная стойкость, лет | 1 | |||
| рабочий диапазон температур, оC | от -50 до +50 | |||
| стабильность к атмосферной влажности при 35оC, % | ||||
| допустимый термический удар, оC | ± 60 | |||
| Материал подложки | оптическое стекло или плавленый кварц | |||
Рис. 1 и Рис. 2 Типичные спектры пропускания Нотч-4 фильтра на 633 нм и Супер Нотч-6 фильтра на 532 нм.
www.tydexoptics.com
Как настроить фильтры в Betaflight: описание всех фильтров + PID — Все о квадрокоптерах
Фильтры — это популярная и актуальная тема в сообществе Betaflight. Фильтры могут поразительно сильно влиять на летные характеристики квадрокоптера. Они также являются причиной задержки между управляющими входами и выходами. По этой причине недостаточно просто включить все фильтры и выставить из на 11.
В последнее время команда разработчиков Betaflight внесла многочисленные изменения в систему фильтров прошивки Betaflight. Изменения включают в себя тонкую настройку существующих фильтров, которые некоторые из вас уже наверное знают:
- Low Pass
- и фильтры Notch.
Также добавлены новые фильтры:
- Dynamic Notch,
- PT2,
- FIR + Biquad,
- Фильтры Калмана (Kalman filters).
Цель этой статьи — научить вас тому, как правильно настроить и тестировать фильтры, чтобы вам было удобно летать. В конце статьи также будут несколько рекомендаций по настройке фильтров в Betaflight 3.3 для наилучших полетов.
Статья нацелена в первую очередь на опытных и продвинутых пилотов, с целью улучшения их летных характеристик.
Примите во внимание, что настройка фильтров не гарантирует вам радикальное улучшение летных характеристик, если у вас слабый опыт пилотирования. В первую очередь на это все будет влиять ваш опыт управления гоночным квадрокоптером.
Также, можно включить динамические фильтры и отключить Notch фильтры, это рекомендуется сделать для еще не сильно опытных пилотов, но вы получите более лучшую производительность без копания в настройках фильтров.
Дальнейшие настройки требуют, чтобы у вас уже были определенные знания о поведении вашего квадрокоптера — если таких знаний еще нет, налетайте несколько часов и снова заходите в эту статью для настройки.
Что такое программные фильтры (Software Filters)
Чтобы настроить фильтры в квадрокоптере, нужно понимать и знать как они работают и что это такое. Но это не значит, что вам нужно выучить трансформации Фурье и другие математические функции, нет. Вам просто нужно знать, что произойдет, когда вы включите и настроите тот или иной фильтр.
Что такое PID и Control Logic: логика управления
Квадрокоптеры летают под управлением PID-контроллеров. PID — это пропорционально-интегрально-производный контроллер (с англ. Proportional-Integral-Derivative), это алгоритм, который считывает показания с гироскопа и управляет моторами в зависимости от показаний датчика. Например, ваш дрон находится в идеальном положении — 0 roll, 0 pitch и 0 yaw. Например, вы нажимаете стик ROLL влево до конца, подавая команду повернуться по оси и дрон с полным ходом влево будет крутиться со скоростью 540 градусов/сек влево. Вот тут-то PID и выполнит свою работу, рассчитав работу двигателей таким образом, чтобы дрон только повернулся по оси, но не наклонился в какую-либо другую сторону.
PID выполняет эти расчеты и разбивает действие на 3 компонента:
- Пропорциональная составляющая — P. Работает непосредственно для поворота и наклона квадрокоптера в плоскостях, добавляя дополнительный газ к двигателям 1 и 2 и уменьшая газ у двигателей 3 и 4.
- Интегральная составляющая — I. Эта составляющая обрабатывает показания — как быстро меняется положение квадрокоптера в пространстве. Например, вы дали полный поворот влево, но регулятор видит, что дрон поворачивается со скоростью 400 градусов, а не 540 как положено и в этот момент начинает корректировать двигатели, чтобы дрон начал поворачиваться со скоростью 540 градусов/сек.
- Производная составляющая — D. Этот компонент сопротивляется быстрому изменению ROLL. Компонент пытается сгладить нарастание и снижение скорости крена из-за команд P и D. Если хорошо настроить D, то он будет четко держать заданные (к примеру) 540 градусов/сек без перерегулирования.
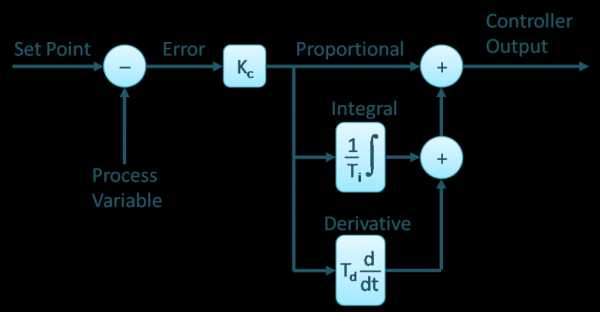 Схема работы PID-контроллера
Схема работы PID-контроллераПроблема шума
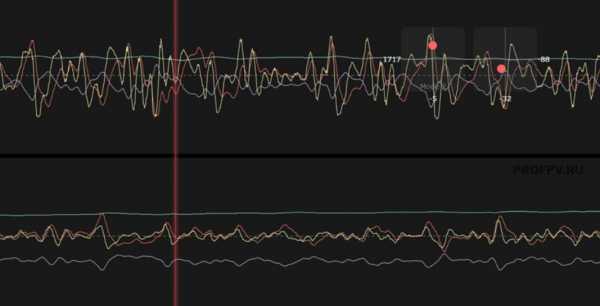
Основная проблема, с которой сталкиваются разработчики прошивок для квадрокоптеров — шумы с данными гироскопа. Гироскоп, который используется на дронах — это невероятно точный датчик, который записывает абсолютно все изменения в пространстве — крен, поворот, высота. Дальше по статье, потом информации вместе с шумом будет называться «сигнал». При построении графика, кривая сигнала будет с большим разбросом синусоидных волн — это и есть помехи, шум.
Общее описание первичных источников этих волн:
- Высокочастотные шумы вызваны вибрацией несбалансированных двигателей и пропеллеров на квадрокоптере и обычно находятся между 100Гц и 500Гц. Если проблема не слишком явная, вы, как правило, не будете знать, что у вас высокочастотный шум, пока не запишите логи в BlackBox.
- Среднечастотные шумы вызываются PID — регулятором, пилот ощущает это как вибрацию или подобное. Также, это заметно и на видео, оно немного будет вибрировать. Эти шумы находятся на отметках 5-100Гц.
- Низкочастотные шумы вызываются динамикой полета самого квадрокоптера. Например, если вы совершаете очень много поворотов и наклонов за короткое время. На графике это проявляется в виде сигнала частотой 1Гц.
Высокочастотные и низкочастотные шумы плохо влияют на PID’ы. Причина в том, что эти сигналы не вызваны динамикой полета самого квадрокоптера, но ПИД-регулятор будет пытаться исправить их, изменив значения газа и сделав их частью полета.
Компонент D у PID особо чувствителен к шуму. Поскольку он реагирует только на степень изменения данных гироскопа, большие наклоны, вызванные синусоидальными волнами, движущимися вверх и вниз, нарушают его. Раньше D-компонент просто уменьшали до минимума и он практически переставал играть роль в полете.
Проблема заключается в том, что основная ответственность компонента D заключается в том, чтобы противостоять вибрации пропеллеров, которые вызваны компонентом Р. Поэтому, если вы сильно уменьшите D, то получите вибрацию на пропеллеры. Поэтому, нужно более лучшее решение.
Программные фильтры
Программный фильтр — это алгоритм, который анализирует гирограмму (сигнал с шумом) со временем, находит образцы шума (синусоидальные волны) и пытается математически удалить их из фида.
Фильтры нужны для удаления высоко и -среднечасточных шумов до того, как сигнал передастся PID-контроллеру. Таким образом получится, что ПИД будет обрабатывать уже чистый сигнал и качество полета заметно улучшится, точнее поведение квадрокоптера улучшится.
Программные фильтры должны анализировать некоторый временной интервал данных гиросигнала, прежде чем они смогут реагировать на воспринимаемый шум. Это требование означает, что фильтры должны задерживать доставку данных гироскопа в ПИД-контроллер, пока они не смогут получить достаточное количество данных для их обработки. Задержка означает, что ваш PID реагирует на то, что квадрокоптер делал некоторое время назад, а не сейчас. Задержка это плохо.
В общем: у квадрокоптера должны быть программные фильтры с наименьшей задержкой обработки.
Как физически можно уменьшить шум
Самый лучший способ уменьшить вибрации от моторов — это поставить их на виброгасительные подушки или любой другой материал, которые будет гасить вибрации. Например, можно использовать простые резиновые шайбы на местах крепления моторов.Таким образом, получится убрать физически нижние частоты шума без дополнительной задержки программной обработки.
На данный момент, многие полетные контроллеры продаются вместе с резиновыми подушками, вот такие и рекомендуется использовать для моторов и для самих контроллеров.
Фильтры Betaflight
Теперь, когда у вас есть общее понятие о фильтрах и как они работают, давайте перейдем к рассмотрению конкретных фильтров в Betaflight.
Существует два основных типа фильтров:
фильтры нижних частот, их иногда называют LPF и Notch. Сложность добавляется, потому что разработчики Betaflight решили добавить два слоя фильтров LPF и Notch: один набор «основных» фильтров и вторичный набор, который выполняет дополнительную фильтрацию для данных, подаваемых на компонент «D» ПИД-регулятора.
Разработчики также добавили значительные параметры конфигурации в оба этих типа фильтров. Это включает в себя возможность установки программного алгоритма, который управляет фильтрами LPF, а также несколькой функций, таких как «динамический» фильтр Notch.
То, что нужно помнить, — это цель: мы хотим максимизировать подавление моторных шумов и минимизировать задержку, создаваемую фильтрами.
Какие бывают фильтры у квадрокоптера
Чтобы минимизировать шум и поддерживать максимальное количество сборок дронов, Betaflight имеет настраиваемый стак фильтра.
Стак — список фильтров.
Этот список включает в себя до 6 фильтров, работающих последовательно, после чего отправляют данные в PID-контроллер. Визуально, принцип работы стака фильтров будет выглядеть вот так:
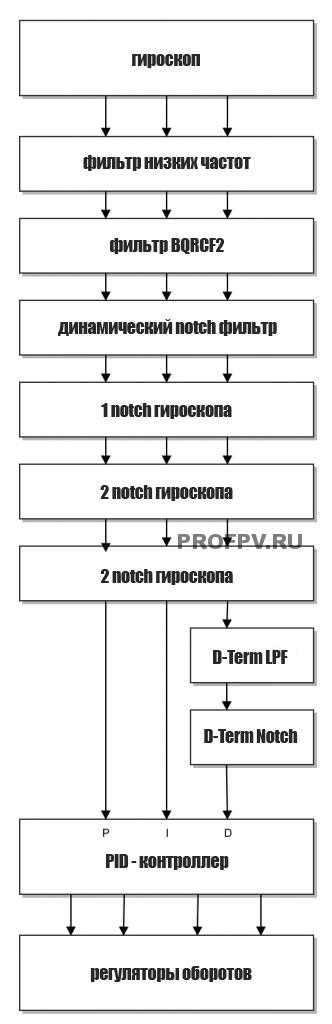
Теперь давайте рассмотрим фильтры в отдельности.
Фильтры нижних частот
Цель низкочастотных фильтров состоит в том, чтобы уменьшить (или уменьшить) высокочастотные сигналы, оставив только низкочастотные сигналы. При настройке LPF вы обычно устанавливаете частотный «ворота». Все частоты ниже этих ворот игнорируются. Все частоты выше ворот затухают, причем более высокие частоты экспоненциально ослабевают. Чем выше частота сигнала, тем больше он ослабляется.
LPF отлично подходят для уменьшения широкой полосы шума в высокочастотной полосе. Тем не менее, им не хватает энергии, необходимой для удаления вибрации от моторов. В частности, на квадрокоптерах с жестко закрепленными полетными контроллерами или двигателями (или обоими) эти вибрации настолько интенсивны, что они легко пропускают большинство LPF. Именно там появляются фильтры Notch, о которых мы поговорим позже. Давайте взглянем на несколько различных алгоритмов, используемых для реализации LPF:
Gyro LPF и D-Term LPF
Betaflight использует два LPF в стеке фильтрации. Первый LPF применяется ко всем данным гироскопа и упоминается как «Gyro LPF». Как обсуждалось ранее, компонент «D» ПИД-регулятора гораздо более чувствителен к шуму, чем другие компоненты, поэтому разработчики Betaflight дали нам возможность добавить дополнительный LPF для данных, которые подаются на контроллер D. Этот второй фильтр может быть более жестким, но задержка, добавленная этой жесткостью, будет добавлена только к D-компоненту ПИД-регулятора и намного менее заметна.
Частота фильтров низких частот
Частота работы LPF — это переменная, описанная выше. Сигналы ниже этого значения игнорируются LPF. Сигналы над ним ослаблены. Эти «ворота» настраиваются в разделе «Filter Settings» на вкладке «PID Tuning» в Betaflight Configurator:
profpv.ru
Терминология цифровых фильтров, страница 2
Коэффициенты (Coefficients) – см. Коэффициенты фильтра (Filter Coefficients).
Коэффициенты фильтра (Filter Coefficients) – набор постоянных, также называемых весами элементов (tap weights), используемые при фильтрации сигнала цифровым фильтром. Проектирование цифрового фильтра – это задача определения коэффициентов фильтра, которые бы обеспечивали желаемую частотную характеристику. Для КИХ-фильтра по определению коэффициенты являются значениями импульсной характеристикой фильтра.
Относительное затухание (Relative Attenuation) – затухание, измеренное относительно наибольшего значения амплитуды. Наибольший уровень сигнала (минимальное затухание) обычно задается относительно уровня в 0 ДБ, при этом остальные значения амплитуды на кривой частотной характеристики имеют отрицательные значения (в ДБ).
Передаточная функция (Transfer Function) – математическое выражение в виде отношения z преобразования выходного сигнала цифрового фильтра к z — преобразованию входного сигнала. Задавая передаточную функцию, мы можем определять амплитудно- и фазочастотные характеристики фильтра.
Переходная область (Transition Region) – область частот между полосой пропускания и полосой задерживания цифрового фильтра. Рисунок 4 иллюстрирует переходную область для фильтра нижних частот. Иногда переходная область также называют переходной полосой (transition band).
Полоса задерживания (Stopband) – полоса частот, ослабляемая цифровым фильтром. Рисунок 4 показывает полосу задерживания для фильтра нижних частот. Хотя затухание в полосе задерживания на рисунке 4 равно -20 ДБ, не все фильтры имеют значения в полосе задерживания, равные соответствующей амплитуде. Рисунок 4 показывает, что затухание в области задерживания измерено между максимальной амплитудой в полосе пропускания и наибольшим значением амплитуды в полосе задерживания.
Полоса пропускания (Passband) – диапазон частот, в пределах которого фильтр пропускает энергию сигнала. Обычно определяется как область частот, в которой частотная характеристика фильтра равна или превышает -3 ДБ, как изображено на рис.4.
Полосовой фильтр (Bandpass Filter) – фильтр, изображенный на рис.5, который пропускает одну полосу частот и ослабляет частоты выше и ниже этой полосы.
Порядок фильтра (Filter Order) – число, описывающее самый высокий показатель степени числителя или знаменателя передаточной функции цифрового фильтра. Для КИХ-фильтров – знаменателя передаточной функции нет и порядок фильтра – это просто число элементов, входящих в структуру фильтра. Для БИХ-фильтров – порядок фильтра равен числу элементов задержки в структуре фильтра. Как правило, чем выше порядок фильтра, тем лучше АЧХ фильтра.
Пульсации (Ripple) – Пульсации показывают колебания в полосе пропускания или полосе задерживания на кривой амплитудно-частотной характеристики фильтра в дБ. Эллиптические фильтры или фильтры Чебышева имеют равно-волновые характеристики, то есть пульсации (колебания) постоянны по амплитуде во всей их полосе пропускания. Производные от АЧХ фильтров Бесселя и Баттерворта не имеют пульсаций в полосе пропускания. Пульсации в полосе задерживания иногда называют также внеполосными пульсациями (out-of-band ripple).
Пульсации в полосе пропускания (Passband Ripple) – пульсации или колебания амплитудно-частотной характеристики в пределах полосы пропускания фильтра. Неравномерность в полосе пропускания, измеряемая в дБ, проиллюстрирована на рисунке 4. (См. Неравномерность (Ripple)).
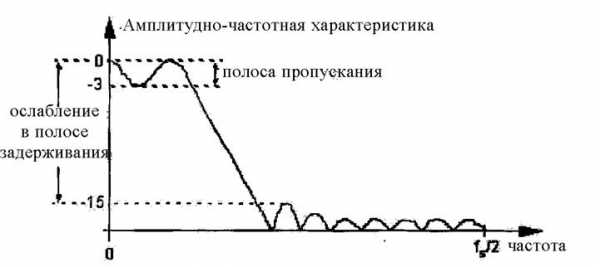
Рис. 4. Частотная характеристика цифрового фильтра низких частот, с обозначением неравномерности в полосе пропускания и ослабления в области непропускания.
Режекторный фильтр (полосно – заграждающий фильтр, Band Reject Filter) – это фильтр, который ослабляет одну полосу частот и пропускает полосы частот ниже и выше её. Рис.5 изображает частотную характеристику идеального режекторного фильтра. Этот тип фильтра иногда называют также узкополосным режекторным фильтром (фильтр-пробка, notch filter).
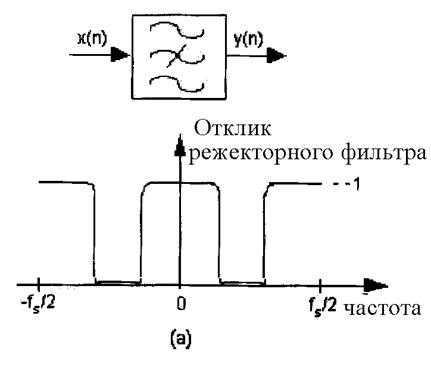
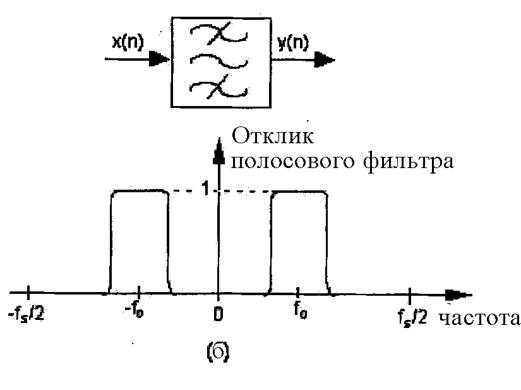
Рис. 5 Обозначение фильтров и их частотные отклики (a) Режекторный фильтр; (б) Полосовой фильтр.
Спад (Rolloff) – этот термин используется для описания крутизны, или наклона, характеристики фильтра в области перехода от полосы пропускания к полосе задерживания. О некоторых цифровых фильтрах говорят, что они имеют спад 12 ДБ/октава – имеется в виду, что первая октава от частоты f до 2f, будет иметь ослабление на 12 ДБ больше, чем ослабление фильтра на частоте f. Вторая октава, 4f, будет ослаблена на 24 ДБ больше, и так далее.
Структурная схема (Structure) – этот термин, используемый в цифровой обработке сигналов. Относится к блок-схеме, показывающей как устроен цифровой фильтр. Рекурсивная структура фильтра – такая, в которой имеет место обратная связь и используются предыдущие значения выходного сигнала фильтра вместе с предыдущими значениями входного сигнала для вычисления текущего выходного сигнала. БИХ-фильтры почти всегда описываются при помощи рекурсивной структуры фильтров. Нерекурсивная структура фильтров – такая, в которой при вычислении текущего выходного сигнала используются только предыдущие входные сигналы. КИХ-фильтры почти всегда описываются при помощи нерекурсивной структуры.
Узкополосный фильтр (фильтр-пробка) (Notch Filter) — см. Режекторный фильтр (Band Reject Filter).
Разрыв фазы (Phase Wrapping) – в стандартной компьютерной операции, используемая для вычисления фазовых углов, могут появляться мнимые разрывы фазы. Когда настоящий фазовый угол равен от -180 до -360, компьютерные программы автоматически преобразовывают эти углы в их эквивалентные положительные углы в области от 0 до +180.
Фазочастотная характеристика (Phase Response) – разность фаз для различных частот между входным и выходным синусоидальными сигналами на данной частоте. ФЧХ, иногда называемая фазовой задержкой (phase delay), обычно изображается в виде кривой, показывающей сдвиг фазы фильтра как функцию от частоты.
Фильтр верхних частот (ФВЧ, Highpass filter) – фильтр, который пропускает высокие частоты и ослабляет низкие, как показано на рисунке F-5(a).
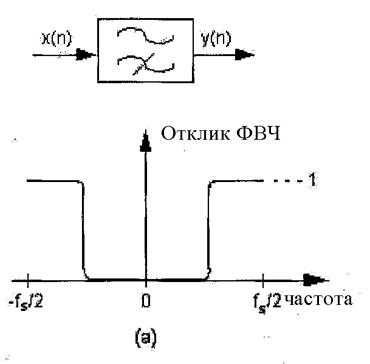
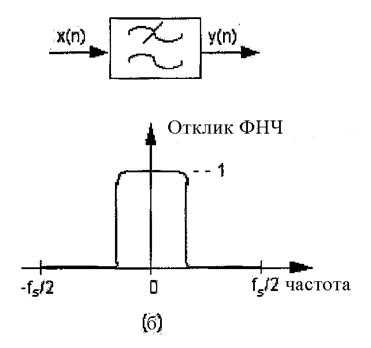
Рис. 6. Обозначение фильтров и частотные отклики:
(а) ФВЧ; (б) ФНЧ.
Все мы имели возможность ознакомиться с высокочастотной фильтрацией в нашей повседневной жизни. Обратите внимание, что происходит, когда мы усиливаем верхние звуковые частоты (или ослабляем нижние звуковые частоты) на наших домашних стереосистемах. Обычный диапазон частотного отклика звукового усилителя изменяется и дает нам повышенный и резкий (tinny) звук, поскольку подчеркиваются высокочастотные составляющие мелодии.
vunivere.ru
notch filter — с английского на русский
Notch-Filter — Ein Kerbfilter (engl.: notch filter) ist ein Frequenz Sperrfilter bzw. eine Frequenzfalle, mit der Frequenzen innerhalb eines engen Frequenzbereiches ausgesiebt werden sollen. Praktisch wird eine Kerbe in das Frequenzband eingefügt. Es findet in… … Deutsch Wikipedia
Notch Filter — Ein Kerbfilter (engl.: notch filter) ist ein Frequenz Sperrfilter bzw. eine Frequenzfalle, mit der Frequenzen innerhalb eines engen Frequenzbereiches ausgesiebt werden sollen. Praktisch wird eine Kerbe in das Frequenzband eingefügt. Es findet in… … Deutsch Wikipedia
notch filter — noun Electronics a filter that attenuates signals within a very narrow band of frequencies … English new terms dictionary
notch filter — F/A/V notches out, or eliminates, a specific band of frequencies … Audio and video glossary
notch filter — … Useful english dictionary
Notch — may refer to: The nock of an arrow Notch (artist), a Hip hop, R B, reggae, dancehall and reggaeton artist Notch signaling pathway, a cell signaling system present in most multicellular organisms Notch filter, a band stop filter with a narrow… … Wikipedia
Filter design — is the process of designing a filter (in the sense in which the term is used in signal processing, statistics, and applied mathematics), often a linear shift invariant filter, which satisfies a set of requirements, some of which are contradictory … Wikipedia
Filter (Elektronik) — Die Elektrotechnik bezeichnet Schaltungen als Filter, die ein elektrisches Signal abhängig von der Frequenz in der Amplitude und Phase verändern. Dadurch können unerwünschte Signalanteile abgeschwächt und unterdrückt werden. Bekannte Anwendungen… … Deutsch Wikipedia
Filter capacitor — Filter capacitors are any capacitors used for filtering. Filter capacitors are common in electrical and electronic work, and cover a number of applications, such as: * Glitch removal on dc power rails * Radio frequency interference (RFI) removal… … Wikipedia
Filter (optics) — Coloured and Neutral Density filters Optical filters are devices which selectively transmit light of different wavelengths, usually implemented as plane glass or plastic devices in the optical path which are either dyed in the mass or have… … Wikipedia
Band-stop filter — A generic ideal band stop filter, showing both positive and negative angular frequencies In signal processing, a band stop filter or band rejection filter is a filter that passes most frequencies unaltered, but attenuates those in a specific… … Wikipedia
translate.academic.ru
notch filter — с английского на все языки
Notch-Filter — Ein Kerbfilter (engl.: notch filter) ist ein Frequenz Sperrfilter bzw. eine Frequenzfalle, mit der Frequenzen innerhalb eines engen Frequenzbereiches ausgesiebt werden sollen. Praktisch wird eine Kerbe in das Frequenzband eingefügt. Es findet in… … Deutsch Wikipedia
Notch Filter — Ein Kerbfilter (engl.: notch filter) ist ein Frequenz Sperrfilter bzw. eine Frequenzfalle, mit der Frequenzen innerhalb eines engen Frequenzbereiches ausgesiebt werden sollen. Praktisch wird eine Kerbe in das Frequenzband eingefügt. Es findet in… … Deutsch Wikipedia
notch filter — noun Electronics a filter that attenuates signals within a very narrow band of frequencies … English new terms dictionary
notch filter — F/A/V notches out, or eliminates, a specific band of frequencies … Audio and video glossary
notch filter — … Useful english dictionary
Notch — may refer to: The nock of an arrow Notch (artist), a Hip hop, R B, reggae, dancehall and reggaeton artist Notch signaling pathway, a cell signaling system present in most multicellular organisms Notch filter, a band stop filter with a narrow… … Wikipedia
Filter design — is the process of designing a filter (in the sense in which the term is used in signal processing, statistics, and applied mathematics), often a linear shift invariant filter, which satisfies a set of requirements, some of which are contradictory … Wikipedia
Filter (Elektronik) — Die Elektrotechnik bezeichnet Schaltungen als Filter, die ein elektrisches Signal abhängig von der Frequenz in der Amplitude und Phase verändern. Dadurch können unerwünschte Signalanteile abgeschwächt und unterdrückt werden. Bekannte Anwendungen… … Deutsch Wikipedia
Filter capacitor — Filter capacitors are any capacitors used for filtering. Filter capacitors are common in electrical and electronic work, and cover a number of applications, such as: * Glitch removal on dc power rails * Radio frequency interference (RFI) removal… … Wikipedia
Filter (optics) — Coloured and Neutral Density filters Optical filters are devices which selectively transmit light of different wavelengths, usually implemented as plane glass or plastic devices in the optical path which are either dyed in the mass or have… … Wikipedia
Band-stop filter — A generic ideal band stop filter, showing both positive and negative angular frequencies In signal processing, a band stop filter or band rejection filter is a filter that passes most frequencies unaltered, but attenuates those in a specific… … Wikipedia
translate.academic.ru