Полный кадр или кропнутая матрица? — Высшая школа фотографии
Очень многие фотографы по мере погружения в фотоискусство задумываются над обновлением своей фототехники. И регулярно встает вопрос, что выбрать – полный кадр или половинчатую матрицу. Казалось бы, ответ очевиден, и полная всегда лучше половинчатой, а от покупки останавливает лишь высокая цена.
Но давайте попробуем разобраться в этом вопросе чуть более обстоятельно и свести воедино все преимущества и недостатки обеих систем.
Полный кадр или матрица (eng – Full Frame) – сенсор размером 36 на 24 мм, приближен к наиболее распространенному пленочному формату в 35 мм. По этой причине является своего рода точкой отсчета для других цифровых сенсоров, как меньшего, так и большего размеров, что, впрочем, не делает его эталоном по качеству.
Половинчатая или кропнутая матрица (eng – Crop) – сенсор примерно вдвое меньшей площади, отличающийся размером в зависимости от конкретного производителя.
Разрешение кропнутых и полнокадровых фотоаппаратов одного поколения чаще всего совпадает, что означает, что на кропнутом сенсоре будет находиться в два раза больше пикселей на единицу площади. Их придется делать меньшего размера и размещать плотнее. В итоге это сказывается на уровне цифрового шума в изображении на высоких значениях ISO в худшую сторону. 1:0 в пользу полного кадра.
Их придется делать меньшего размера и размещать плотнее. В итоге это сказывается на уровне цифрового шума в изображении на высоких значениях ISO в худшую сторону. 1:0 в пользу полного кадра.
Физический размер кропнутой матрицы меньше, и ее поверхность не может захватить всю площадь изображения от объектива системы 35мм, только центральную часть. Другими словами, это эквивалентно тому, как если бы мы снимали на объектив с фокусным расстоянием в 1,5 раза больше. С одной стороны, это не очень удобно, так как на кропе не получится достигнуть рекордно широкого угла охвата изображения, востребованного в пейзаже, интерьере и архитектуре. 2:0
С другой стороны, это простой способ без дополнительных затрат увеличить эффективное фокусное расстояние длиннофокусных объективов, что важно в спортивной съемке и в съемке дикой природы, где цены на объективы могут превышать 10 000 долларов. 2:1
Не забываем про стоимость фотоаппаратов на основе разных сенсоров. Разница в цене аналогичных по функциям фотоаппаратов может достигать трех раз. Так что 2:2
Так что 2:2
В силу меньшей площади поверхности производители стали выпускать специальные объективы с меньшей площадью проекции. Такие объективы имеют меньший вес, более компактные размеры и, как правило, более низкую цену. 2:3
При съемке на 35-мм объективы, как мы уже обсуждали, сенсор захватывает только центральную часть кадра, свободную от большинства оптических искажений, так что на кропе мы можем получить идеальное качество изображения от края до края. 2:4 в пользу кропнутых систем.
Еще одно отличие двух форматов – разница в минимальной глубине резкости. Благодаря большей площади сенсора полнокадровые камеры при одинаковой светосиле объектива и эквивалентных фокусных расстояниях способны продемонстрировать меньшую глубину резкости, что может стать небольшим преимуществом, например, в портрете, когда нужно отделить объект съемки от фона. Кстати, про все нюансы отделения человека от фона мы рассказываем на курсе Портрет на улице. Однако эта же особенность будет недостатоком в других жанрах, к примеру, при съемке предметки или макро, где нужна большая глубина резкости. Так что тут ничья. 3:5
Так что тут ничья. 3:5
Как видите, у кропа в итоге оказалось преимуществ больше, он показал себя более практичной системой. Но помните, что для раскрытия потенциала камеры в первую очередь нужна хорошая оптика. Большое количество негативных отзывов на кроп связано с их использованием вместе с дешевыми универсальными объективами, идущими в комплекте.
Но и полный кадр со счетов сбрасывать рано – он незаменим в “широкоугольных жанрах”, а также имеет преимущества в условиях низкой освещенности.
Пётр Покровский
CCD или CMOS? Критерии выбора
Матрица – это основа любого фото- или видеоустройства. Она определяет качество и размер получаемого изображения. На сегодняшний день в изготовлении матриц используются два разных технологичных принципа — CCD и CMOS. Очень часто можно услышать вопрос: «Какую матрицу выбрать: CCD или CMOS?» Среди любителей фото- и видеотехники по этому поводу идут жаркие споры. В этой статье мы проведем обзор этих двух типов и попробуем разобраться, какая матрица лучше — CCD или CMOS.
Общая информация
Матрицы предназначены для оцифровки параметров световых лучей на их поверхности. Говорить о явном преимуществе одной из технологий не представляется возможным. Можно проводить сравнение по конкретным параметрам и выявлять лидера в том или ином аспекте. Что касается предпочтений пользователей, то зачастую для них главным критерием является стоимость изделия, даже если оно будет уступать по качеству или техническим характеристикам своему конкуренту.
Тип матрицы монитора
Современные компьютеры совсем не похожи на те громоздкие медленные машины, которые, однако,…
Итак, давайте разберемся, что представляют собой оба типа устройств. CCD-матрица – это микросхема, которая состоит из светочувствительных фотодиодов; она создана на кремниевой основе. Особенность ее работы заключается в принципе действия устройства с зарядовой связью. CMOS-матрица – это прибор, созданный на основе полупроводниковых полевых транзисторов, имеющих изолированный затвор с каналами различной проводимости.
Принцип работы
Перейдем к выявлению отличий, которые помогут определиться в выборе: что же лучше — матрица CMOS или CCD? Главным различием этих двух технологий является принцип их работы. CCD-устройства заряд от пикселей преобразуют в электрический потенциал, который усиливается за пределами светочувствительных сенсоров. В результате получается изображение в аналоговом виде. После этого проводится оцифровка всей картинки в АЦП. То есть прибор состоит из двух частей — непосредственно матрицы и преобразователя. CMOS-технология характеризуются тем, что производит оцифровывание каждого пикселя в отдельности. На выходе получается уже готовая цифровая картинка. То есть электрический заряд в пикселе матрицы накапливается в конденсаторе, с которого снимается электрический потенциал. Он передается на аналоговый усилитель (встроенный непосредственно в пикселе), после чего оцифровывается в преобразователе.
Лучшие веб-камеры: полный обзор, технические характеристики…
Попробуем разобраться и определиться, какая веб-камера лучше, и что выбрать из крайне обширного. ..
..
Что же выбрать: CCD или CMOS?
Одним из немаловажных параметров, которые определяют выбор между этими технологиями, является количество усилителей матрицы. CMOS-устройства имеют большее количество этих приборов (в каждой точке), поэтому при прохождении сигнала несколько снижается качество картинки. Поэтому CCD-матрицы используют для создания изображений с высокой степенью детализации, например, в медицинских, исследовательских, промышленных целях. А вот CMOS-технологии применяют в основном в бытовой технике: веб-камерах, смартфонах, планшетах, ноутбуках и т. п.
Следующим параметром, который определяет, какой тип лучше — CCD или CMOS, — является плотность фотодиодов. Чем она выше, тем меньше фотонов «пропадет вхолостую», соответственно, изображение будет лучше. В этом параметре CCD-матрицы обходят своих конкурентов, так как предлагают макет, не имеющий таких зазоров, в то время как у CMOS они присутствуют (в них расположены транзисторы).
Тем не менее, когда перед пользователем встает выбор: какой тип матрицы — CMOS или CCD — приобрести, всплывает главный параметр – цена устройства. CCD-технология значительно дороже своего конкурента и энергозатратнее. Поэтому устанавливать их там, где достаточно изображения среднего качества, нецелесообразно.
CCD-технология значительно дороже своего конкурента и энергозатратнее. Поэтому устанавливать их там, где достаточно изображения среднего качества, нецелесообразно.
и оценка основной матрицы с помощью RANSAC
Проект 5: Калибровка камеры и оценка основной матрицы с помощью RANSACСтруктура из нескольких представлений изображения. Рисунок Snavely et др.
Логистика
- Шаблон: Project5_CameraCalibration
- Часть 1: Вопросы
- Вопросы + шаблон: Теперь в репозитории: вопросы/
- Процесс сдачи: Gradescope в формате PDF. Отправляйте анонимные материалы пожалуйста!
- Часть 2: Код
- Шаблон записи: В репозитории: запись/
- Требуемые файлы: code/, writeup/writeup.pdf
- Процесс передачи: Gradescope в качестве репозитория GitHub. Представлять на рассмотрение анонимные материалы пожалуйста!
Обзор
Цель этого проекта — познакомить вас с геометрией камеры и сцены. Конкретно оценим камеру
матрица проекции, которая отображает координаты трехмерного мира в координаты изображения, а также фундаментальная матрица, которая
связывает точки в одной сцене с эпиполярными линиями в другой. Матрица проекции камеры и основная матрица
каждый из них можно оценить с помощью точечных соответствий. Чтобы оценить проекционную матрицу — внутреннюю и внешнюю
калибровка камеры — на входе соответствующие 3d и 2d точки. Чтобы оценить фундаментальную матрицу, вход
соответствует 2d точкам на двух изображениях. Вы начнете с оценки проекционной матрицы и
фундаментальная матрица для сцены с наземными истинными соответствиями. Затем вы перейдете к оценке фундаментальных
матрица с использованием точечных соответствий из SIFT и RANSAC.
Конкретно оценим камеру
матрица проекции, которая отображает координаты трехмерного мира в координаты изображения, а также фундаментальная матрица, которая
связывает точки в одной сцене с эпиполярными линиями в другой. Матрица проекции камеры и основная матрица
каждый из них можно оценить с помощью точечных соответствий. Чтобы оценить проекционную матрицу — внутреннюю и внешнюю
калибровка камеры — на входе соответствующие 3d и 2d точки. Чтобы оценить фундаментальную матрицу, вход
соответствует 2d точкам на двух изображениях. Вы начнете с оценки проекционной матрицы и
фундаментальная матрица для сцены с наземными истинными соответствиями. Затем вы перейдете к оценке фундаментальных
матрица с использованием точечных соответствий из SIFT и RANSAC.
Помните эти сложные изображения Епископского дворца Гауди из Проекта 2? С помощью RANSAC найти фундаментальной матрицы с наибольшим количеством вкраплений, мы можем отфильтровать ложные совпадения и добиться почти идеальной точки для сопоставление точек, как показано ниже:
Детали и стартовый код
Этот проект состоит из трех частей:
- Оценка проекционной матрицы,
- Оценка фундаментальной матрицы и
- Надежная оценка фундаментальной матрицы с помощью RANSAC на основе ненадежных совпадений SIFT.

Эти три задачи могут быть реализованы в student.py .
Часть I: Матрица проекции камеры
Учитывая известные соответствия точек 3D и 2D, как мы можем восстановить матрицу проекции, которая преобразуется из трехмерного мира? координаты в координаты 2D-изображения? Напомним, что при использовании однородных координат уравнение перехода из 3D координаты мира в 2D-камеру:
$$\begin{pmatrix}u \\ v \\ 1\end{pmatrix} \cong \begin{pmatrix}su \\ sv \\ s \end{pmatrix}= M \begin{pmatrix}X \\ Y \\ Z \\ 1 \end{pmatrix} = \begin{pmatrix}m_{11} & m_{12} & m_{13} & m_{14} \\ м_{21} и м_{22} и м_{23} и м_{24} \\ m_{31} & m_{32} & m_{33} & m_{34} \end{pmatrix} \begin{pmatrix}X \\ Y \\ Z \\ 1 \end{pmatrix}$$ В
класса, мы увидели два решения этой проблемы, которые требуют перестановки коэффициентов 3D и 2D
точечные доказательства: $$u = \frac{m_{11}X + m_{12}Y + m_{13}Z + m_{14}}{m_{31}X + m_{32}Y + m_{33}Z + m_ {34}}$$
$$\rightarrow (m_{31}X + m_{32}Y + m_{33}Z + m_{34})u = m_{11}X + m_{12}Y + m_{13}Z + m_{ 14}$$
$$\rightarrow 0 = m_{11}X + m_{12}Y + m_{13}Z + m_{14} — m_{31}uX — m_{32}uY — m_{33}uZ — m_{34 }u$$
$$v = \frac{m_{21}X + m_{22}Y + m_{23}Z + m_{24}}{m_{31}X + m_{32}Y + m_{33}Z + m_ {34}}$$
$$\rightarrow (m_{31}X + m_{32}Y + m_{33}Z + m_{34})v = m_{21}X + m_{22}Y + m_{23}Z + m_{ 24}$$
$$\rightarrow 0 = m_{21}X + m_{22}Y + m_{23}Z + m_{24} — m_{31}vX — m_{32}vY — m_{33}vZ — m_{34 }v$$ С помощью этих перестановок мы можем настроить нашу линейную регрессию, чтобы найти элементы матрицы M.
Однако в проективной геометрии матрица M определена только до неизвестного масштаба. Фактически эти уравнения
иметь множество различных возможных решений.
В
класса, мы увидели два решения этой проблемы, которые требуют перестановки коэффициентов 3D и 2D
точечные доказательства: $$u = \frac{m_{11}X + m_{12}Y + m_{13}Z + m_{14}}{m_{31}X + m_{32}Y + m_{33}Z + m_ {34}}$$
$$\rightarrow (m_{31}X + m_{32}Y + m_{33}Z + m_{34})u = m_{11}X + m_{12}Y + m_{13}Z + m_{ 14}$$
$$\rightarrow 0 = m_{11}X + m_{12}Y + m_{13}Z + m_{14} — m_{31}uX — m_{32}uY — m_{33}uZ — m_{34 }u$$
$$v = \frac{m_{21}X + m_{22}Y + m_{23}Z + m_{24}}{m_{31}X + m_{32}Y + m_{33}Z + m_ {34}}$$
$$\rightarrow (m_{31}X + m_{32}Y + m_{33}Z + m_{34})v = m_{21}X + m_{22}Y + m_{23}Z + m_{ 24}$$
$$\rightarrow 0 = m_{21}X + m_{22}Y + m_{23}Z + m_{24} — m_{31}vX — m_{32}vY — m_{33}vZ — m_{34 }v$$ С помощью этих перестановок мы можем настроить нашу линейную регрессию, чтобы найти элементы матрицы M.
Однако в проективной геометрии матрица M определена только до неизвестного масштаба. Фактически эти уравнения
иметь множество различных возможных решений. В случае вырожденного решения M = все нули, что не очень полезно.
в нашем контексте.
В случае вырожденного решения M = все нули, что не очень полезно.
в нашем контексте.Мы рассмотрим два способа обойти это:
- Мы можем исправить масштаб, установив последний элемент \(m_{34}\) равным 1, а затем найдя остальные коэффициенты,
- Мы можем использовать разложение по сингулярным числам для непосредственного решения задачи оптимизации с ограничениями, в которой установлен масштаб: $$\begin{align*} &\min\|Ax \| \\ &s.t ~ \| х \| = 1\конец{выравнивание*}$$
Восстановив вектор значений одним из этих методов, мы должны преобразовать его в предполагаемую камеру. проекционная матрица М.
Чтобы помочь вам проверить M, мы предоставляем оценочный код, который вычисляет общую «остаточную ошибку» между прогнозируемыми
Двухмерное местоположение каждой трехмерной точки и фактическое местоположение этой точки на двухмерном изображении. Остаток является евклидовым
расстояние в плоскости изображения (квадратный корень из суммы квадратов разностей u и v). Это должно быть очень
маленький — порядка пикселя. Мы также предоставляем набор «нормализованных точек» в файлах
./pts2d-norm-pic_a.txt и ./pts3d-norm.txt. Стартовый код загрузит эти 20 соответствующих нормализованных 2D и
3D точки. Если вы решаете для M, используя все точки, вы должны получить матрицу, которая является масштабированным эквивалентом матрицы.
следующая матрица:
Это должно быть очень
маленький — порядка пикселя. Мы также предоставляем набор «нормализованных точек» в файлах
./pts2d-norm-pic_a.txt и ./pts3d-norm.txt. Стартовый код загрузит эти 20 соответствующих нормализованных 2D и
3D точки. Если вы решаете для M, используя все точки, вы должны получить матрицу, которая является масштабированным эквивалентом матрицы.
следующая матрица:
Имея эту матрицу, мы можем спроецировать трехмерные точки мира на плоскость нашей камеры. Например, эта матрица примет нормализованная 3D точка и спроецируйте его на 2D-изображение (после преобразования однородной 2D-точки к его неоднородному варианту путем деления на s).
Когда у нас есть точная проекционная матрица M, можно разложить ее на более знакомые и более
полезная матрица K внутренних параметров и матрица [R | T] внешних параметров.
Центр камеры C можно найти с помощью: 9{-1} м_4$$
Если мы используем приведенные выше нормализованные 3D-точки и M, мы получим центр камеры:
$$C _{\text{норма}A} = $$Мы также предоставили визуализацию, которая покажет примерное трехмерное расположение камеры относительно нормализованные трехмерные координаты точки.
Часть II: Оценка фундаментальной матрицы
Следующая часть этого проекта состоит в том, чтобы оценить отображение точек на одном изображении в линии на другом с помощью
фундаментальная матрица. Это потребует от вас использования тех же методов, что и в части 1. Мы воспользуемся
соответствующие местоположения точек перечислены в pts2d-pic_a.
Фундаментальная матрица иногда определяется как транспонирование вышеуказанной матрицы с левым и правым изображением. точки поменялись местами. Обе являются действительными фундаментальными матрицами, но функции визуализации в начальном коде предполагают, что вы используете приведенную выше форму.
Другой способ записи этого матричного уравнения:
$$\begin{pmatrix}u’ & v’ & 1\end{pmatrix}\begin{pmatrix}f_{11}u + f_{12}v + f_{13} \\ f_{21}u + f_{22}v + f_{23} \\ f_{31}u + f_{32}v + f_{33} \end{pmatrix} = 0$$Что то же самое, что:
$$\begin{pmatrix}f_{11}uu’ + f_{12}vu’ + f_{13}u’ + f_{21}uv’ + f_{22}vv’ + f_{23}v’ + f_ {31}и + ф_{32}в + ф_{33} \end{pmatrix} = 0$$Благодаря этому мы можем построить линейную систему для решения с помощью регрессии наименьших квадратов. Для каждой неизвестной переменной мы
нужно одно уравнение, чтобы ограничить наше решение. Пара соответствующих точек даст одно уравнение для нашего
система. Однако, как и в части I, эта матрица определена только в масштабе, а вырожденное нулевое решение решает
эти уравнения. Нам нужно зафиксировать масштаб и решить, используя те же методы, что и в части 1. Это дает нам возможность
решить систему с 8-точечными соответствиями (или более, поскольку мы восстанавливаем наилучший метод наименьших квадратов, соответствующий всем точкам).
Для каждой неизвестной переменной мы
нужно одно уравнение, чтобы ограничить наше решение. Пара соответствующих точек даст одно уравнение для нашего
система. Однако, как и в части I, эта матрица определена только в масштабе, а вырожденное нулевое решение решает
эти уравнения. Нам нужно зафиксировать масштаб и решить, используя те же методы, что и в части 1. Это дает нам возможность
решить систему с 8-точечными соответствиями (или более, поскольку мы восстанавливаем наилучший метод наименьших квадратов, соответствующий всем точкам).
Оценка F методом наименьших квадратов имеет полный ранг; однако фундаментальная матрица является матрицей ранга 2. Таким образом, мы
должен понизить свой ранг. Для этого мы можем разложить F, используя разложение по сингулярным числам, на матрицы U ΣV’
= F. Затем мы можем оценить матрицу ранга 2, установив наименьшее сингулярное значение в Σ равным нулю, таким образом генерируя
Σ2. Тогда фундаментальная матрица легко вычисляется как F = U Σ2 V’. Мы можем проверить нашу фундаментальную матрицу
оценка путем построения эпиполярных линий с использованием функции построения, предусмотренной в начальном коде.
Тогда фундаментальная матрица легко вычисляется как F = U Σ2 V’. Мы можем проверить нашу фундаментальную матрицу
оценка путем построения эпиполярных линий с использованием функции построения, предусмотренной в начальном коде.
Часть III: Фундаментальная матрица с RANSAC
Учитывая две фотографии сцены, маловероятно, что наша точка соответствия для выполнения регрессии для фундаментальной матрицы все было бы правильно. Наша следующая задача — использовать RANSAC для надежной оценки фундаментальная матрица из ненадежных точечных соответствий, вычисленная с помощью детектора характерных точек. Мы моделируем шума (поскольку мы используем наземные точки истинности) с помощью двух видов шумовых функций.
Сначала мы просим вас написать функцию позиционного шума. Это примет интервал и добавит некоторое значение
(выбирается равномерно случайным образом) из интервала, в основном искажая координаты совпадений на некоторые
количество. Это необходимо сделать только для некоторого процента точек, указанных в аргументах функции.
Это необходимо сделать только для некоторого процента точек, указанных в аргументах функции.
Другие наши функции вносят шум в совпадения, случайным образом меняя местами некоторые подмножества совпадений. Итак, если вы имеют 100 баллов и просят добавить шума до 30%, то 30 баллов следует перетасовать в списке. Обратите внимание, мы хотите переключить точки на изображении A, совпадающие с другими точками на изображении B, а не поменять местами индексы указывает на себя.
Стартовый код использует совпадения с земной истиной (вместе с флагом для выполнения сопоставления характерных точек с ORB).
дескриптор) для пары изображений. По желанию, мы возмущаем эти матчи шумом, используя ваши функции, которые вы
только что написал. Мы будем использовать эти возможные точечные соответствия и RANSAC, чтобы попытаться найти хорошую фундаментальную матрицу.
Мы будем итеративно выбирать случайный набор точечных соответствий (например, 8, 9 или некоторое небольшое количество точек),
найдите фундаментальную матрицу, используя функцию, которую вы написали для части II, а затем подсчитайте количество вставок. Вкладыши в этом контексте будут точечными соответствиями, которые «согласуются» с оцененной фундаментальной матрицей. К
подсчитайте, сколько внутренних элементов имеет фундаментальная матрица, вам понадобится метрика расстояния, основанная на фундаментальной матрице.
матрица. (Подсказка: для точечного соответствия (x’,x) какими свойствами обладает фундаментальная матрица?). Ты будешь
также необходимо выбрать порог между выбросами и выбросами. Результаты будут очень чувствительны к этому
порог, поэтому изучите диапазон значений, который устанавливает баланс между разрешением и исключением. Мы также должны
принять решение о критериях остановки для RANSAC, например, учитывая тысячи итераций RANSAC. После остановки,
вернуть фундаментальную матрицу с наибольшим количеством вкладышей. 98 = 0,39% шанс
случайным образом выбрать 8 неверных соответствий при оценке фундаментальной матрицы. Правильная фундаментальная матрица
должно иметь больше выбросов, чем выбросов, созданных из ложных совпадений, иначе проблема не разрешима.
Вкладыши в этом контексте будут точечными соответствиями, которые «согласуются» с оцененной фундаментальной матрицей. К
подсчитайте, сколько внутренних элементов имеет фундаментальная матрица, вам понадобится метрика расстояния, основанная на фундаментальной матрице.
матрица. (Подсказка: для точечного соответствия (x’,x) какими свойствами обладает фундаментальная матрица?). Ты будешь
также необходимо выбрать порог между выбросами и выбросами. Результаты будут очень чувствительны к этому
порог, поэтому изучите диапазон значений, который устанавливает баланс между разрешением и исключением. Мы также должны
принять решение о критериях остановки для RANSAC, например, учитывая тысячи итераций RANSAC. После остановки,
вернуть фундаментальную матрицу с наибольшим количеством вкладышей. 98 = 0,39% шанс
случайным образом выбрать 8 неверных соответствий при оценке фундаментальной матрицы. Правильная фундаментальная матрица
должно иметь больше выбросов, чем выбросов, созданных из ложных совпадений, иначе проблема не разрешима.
Для некоторых реальных изображений оцениваемая фундаментальная матрица может подразумевать невозможную связь между камеры, например, эпиполь в центре одного изображения, когда камеры на самом деле имеют большую трансляционную параллель к плоскости изображения. Предполагаемая фундаментальная матрица также может быть неверной, поскольку мировые точки компланарные, или потому что камеры на самом деле не являются камерами-обскурой и имеют искажения объектива. Тем не менее, эти «неправильные» фундаментальные матрицы, как правило, удаляют неправильные совпадения характерных точек (и, к сожалению, многие тоже правильные).
Оценка и визуализация
Для части I мы предоставили ожидаемый результат (матрица M и центр камеры C). Это численные оценки, поэтому мы не будем проверять точные цифры, только приблизительно правильные местоположения.
В части II вас будут оценивать на основе вашей оценки фундаментальной матрицы. Вы можете проверить, насколько хорош ваш
оценка фундаментальной матрицы путем рисования
эпиполярные линии на одном изображении, которые соответствуют точке на другом изображении. Вы должны увидеть все эпиполярные
линии, пересекающие соответствующую точку в другом
изображение, как это:
Вы можете проверить, насколько хорош ваш
оценка фундаментальной матрицы путем рисования
эпиполярные линии на одном изображении, которые соответствуют точке на другом изображении. Вы должны увидеть все эпиполярные
линии, пересекающие соответствующую точку в другом
изображение, как это:
Мы предоставляем вам функцию в начальном коде, которая рисует эпиполярную линию на изображении с учетом фундаментальной матрица и точка с другого изображения.
Часть III является наиболее открытой частью этого задания. Ваша цель должна состоять в том, чтобы продемонстрировать, что вы можете
оценить фундаментальную матрицу для пары реальных изображений и использовать ее для отклонения ложных совпадений ключевых точек. Мы можем проверить
фундаментальную матрицу, которую вы оцениваете, и вы должны визуализировать исправленное изображение в своем отчете. Кроме того,
мы требуем, чтобы вы реализовали функции шума и исследовали влияние шума на то, насколько хорошо работает RANSAC.
Мы не включаем оценку точности ключевых точек, используемую в проекте 2. Вы должны быть в состоянии получить почти идеальный результат. точность (очень мало выбросов) среди ключевых точек, которые вы обозначили как выбросы.
Данные
Мы предоставляем двухмерные и трехмерные соответствия точек истинности для базовой пары изображений (pic_a.jpg и pic_b.jpg) и для трех используемых изображений.
Запрещенные функции
Вы должны построить матрицы для калибровки камеры и оценки F-матрицы самостоятельно, но вы можете использовать готовые линейные решатели. Вы также должны внедрить RANSAC самостоятельно. Вы также должны написать шум функции самостоятельно. Не стесняйтесь использовать функции numpy.
Примечания по нормализации координат
Ваша оценка фундаментальной матрицы может быть улучшена путем нормализации координат перед вычислением
фундаментальная матрица. Рекомендуется выполнить нормализацию с помощью линейных преобразований, как описано
ниже, чтобы сделать среднее значение точек равным нулю, а среднюю величину около 1,0 или какое-то другое небольшое число (квадрат
также рекомендуется корень из 2).
Рекомендуется выполнить нормализацию с помощью линейных преобразований, как описано
ниже, чтобы сделать среднее значение точек равным нулю, а среднюю величину около 1,0 или какое-то другое небольшое число (квадрат
также рекомендуется корень из 2).
Матрица преобразования T является произведением матриц масштаба и смещения. c_u и c_v — средние координаты.
Чтобы вычислить шкалу s, вы можете оценить стандартное отклонение после вычитания средних значений. Затем шкала
фактор s будет обратным любой оценке шкалы, которую вы используете. Или вы можете найти максимум
абсолютная величина. Или вы можете масштабировать координаты так, чтобы средний квадрат расстояния от начала координат (после
центрирование) равно 2. Вы можете использовать одну масштабную матрицу на основе статистики координат обоих изображений или
вы можете сделать это для каждого изображения. 9{T} @ F_{норма} @ T_{a}$$
Вы можете использовать одну масштабную матрицу на основе статистики координат обоих изображений или
вы можете сделать это для каждого изображения. 9{T} @ F_{норма} @ T_{a}$$
Это может быть реализовано в вашей функции Assessment_fundamental_matrix() написанной для части II, но
на самом деле вы не заметите разницы во второй части, потому что входные соответствия практически идеальны. В
часть III (которая вызывает Assessment_fundamental_matrix() ), вы, скорее всего, заметите улучшение.
В качестве альтернативы вы можете реализовать масштабирование на основе распределения координат всех объектов, а не только
горстка перешла в оценка_фундаментальная_матрица() . В своем письме вы должны выделить один
до и после случая, когда нормализация улучшила ваши результаты.
Рецензия
Опишите свой процесс и алгоритм, покажите свои результаты, опишите любые дополнительные баллы и сообщите нам любые другие
информация, которую вы считаете актуальной.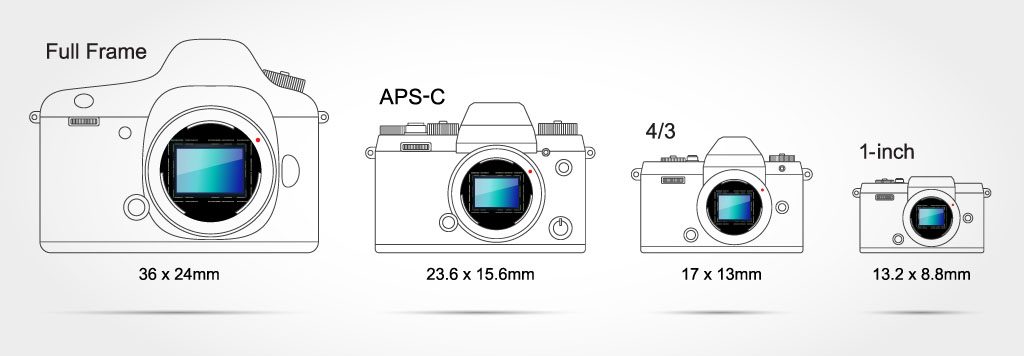 Мы предоставляем вам шаблон LaTeX
Мы предоставляем вам шаблон LaTeX writeup/writeup.tex . Пожалуйста
скомпилируйте его в PDF и отправьте вместе с кодом.
Не забудьте включить следующие детали в описание вашего метода:
- Ваша оценка проекционной матрицы и центра камеры.
- Ваша оценка фундаментальной матрицы для пары базовых изображений (pic_a.jpg и pic_b.jpg).
- Покажите нам соответствия (и исправленное изображение) с увеличением уровня шума обоих видов. Сравните, как Оценка RANSAC и ванили выполняется на каждом уровне. Напишите, что вы думаете о том, насколько хорошо работает RANSAC.
- Покажите нам, что произойдет, если использовать функции ORB вместо читов по процентным очкам. Детализируйте свой выводы.
Мы проводим анонимную оценку TA, поэтому, пожалуйста, не указывайте свое имя или удостоверение личности в описании или коде.
Рубрика
- +10 баллов: Правильная постановка системы уравнений регрессии методом наименьших квадратов для проекции
матрица.
- +10 баллов: Правильное решение для матрицы проекции и правильное решение для центра камеры.
- +10 баллов: Правильная настройка фундаментальной матричной регрессии.
- +10 баллов: Правильное решение фундаментальной матрицы и создание хороших эпиполей на образцах изображений.
- +8 баллов: Корректная реализация шумовых функций.
- +27 баллов: Правильное сочетание RANSAC с фундаментальной матричной оценкой и генерация правильного выпрямления картинки.
- +05 очков: Напишите.
- -05*n баллов: где n — количество раз, когда вы не следуете инструкциям по сдаче.
Дополнительный кредит
Пожалуйста, задокументируйте в своем письме, какие дополнительные кредиты вы сделали, и подробно опишите их результат.
- до 3 баллов: Пользовательская функция шума.
- до 5 баллов: улучшите код вашего проекта 2, используя методы этого проекта.

- до 10 баллов: используйте другую процедуру RANSAC (и сравните ее производительность с базовой RANSAC), например:
- МАГСАК (реализация C++) (реализация Python)
- MLESAC (реализация C++ через PCL) (привязки Python для PCL)
- до 10 баллов: обучение современному алгоритму обнаружения точек или алгоритму соответствия для глубокого обучения.
- Пример: Йи и др., «Учимся находить хорошие соответствия» (GitHub)
Кредиты
Этот проект основан на проекте CS 4495, предложенном Аароном Бобиком в GATech, и был расширен и под редакцией Генри Ху, Грэди Уильямса и Джеймса Хейса. Элеонора Турсман адаптировала код для Python с помощью Анна Сабель.
Матричный замер © 2005 KenRockwell.com
Матричный измеритель Nikon
Далее Страница >>
идти прямо к пояснительной литературе по продажам >>
больше информация о ночной фотосъемке >>
идти прямо к дозирующим наконечникам внизу страницы >>
См. также Экспозиция и цифровая экспозиция
также Экспозиция и цифровая экспозиция
B&H Фото — Видео — Профессиональное аудио Я покупаю только из этих одобренных источников. Я не могу ручаться за рекламу ниже. |
Осторожно : Если вы снимаете пленку для печати, экспозиция, которую вы видите на своих отпечатках, ничего не имеет делать с экспозицией, которую вы сделали в камере. Экспозиция – это вопрос ваш одночасовой лабораторный младший. техник средней школы, а не ваша техника или ваш негатив. Игнорировать этот раздел полностью или снимать прозрачные пленки вместо. Только снимая диапозитивы или выполняя собственную лабораторную работу, вы сможете контролировать свои окончательные результаты.
Если вы
у вас проблемы с экспозицией ваших отпечатков, скорее всего, это было так
они были напечатаны, а НЕ как они были разоблачены.
Если вы видеть мутные, тусклые, зернистые или светлые тени без деталей на отпечатках то у вас недоэкспонированный негатив; в противном случае, единственная причина печати будет слишком темным, если он был напечатан неправильно.
ВВЕДЕНИЕ
превосходный матричный замер — основная причина выбора Nikon среди других брендов.
Никон
Матричный замер, представленный как «Автоматический мультишаблон» (AMP)
замера в камере FA в 1983 году, это был первый в мире измеритель, который фактически
измеренная экспозиция, а не просто свет. Это один из самых важных
прогресс в фототехнике. Этот метр знает, как сделать белый
снег или песок выглядят белыми, а не обычным экспонометром
все выглядит средним 18% серый. Автоматически применяет систему зон
попытаться передать правильную экспозицию в сложных и контрастных условиях. ситуации. При съемке в спешке в быстро меняющихся условиях
в этом весь смысл использования камеры небольшого формата, такой как Nikon,
нет лучшего способа измерить экспозицию.
Ан пример слишком большого контраста сцены в полдень.
Без счетчика может исправить плохое освещение или слишком высокий коэффициент освещения. Это смущает многие думают, что их счетчики неисправны, хотя счетчик идеально. Если у вас есть проблемы со смывом светлых участков, даже если ваш объект хорошо экспонирован или тени становятся слишком темными, хотя с основным объектом все в порядке, ваша проблема в слишком большом контрасте в вашем освещение, а не экспозиция. Для фотографий с людьми используйте свой Nikon мигать при любых условиях, и вы, вероятно, улучшите большинство из них. проблемы.
Освещение
является важнейшим техническим и художественным аспектом живописи, искусства и
фотография. Другие уже много писали об освещении, так что не буду.
попробуйте продублировать это здесь. Мне нравится писать о вещах, которые вы не можете найти
в любом другом месте. Крайне важно, чтобы вы научились быть чувствительными к
качество света и научитесь терпеливо ждать его. Это очень,
очень важный!
Все другие крупные производители SLR примерно с 1990 подражали этому метру под разными именами. Canon называет это «оценочным», и большинство производителей камер хвастаются этим, указывая, сколько датчиков они использовать. Даже Leica пытается его скопировать. Сегодняшняя Leica R8 имеет такая же техническая изощренность, как у Nikon FA 1983 года.
количество датчиков не имеет значения. Мудрость, которая входит в прошивку что важно интерпретировать данные с датчиков.
оригинальный Nikon FA имел всего 5 датчиков замера. Сегодня даже Matrix F100
измеритель работает с теми же 5 основными датчиками и добавляет только 5 точечных датчиков
в микс для тонкой настройки. Превосходный Rebel 2000 от Canon требует 35 сенсоров;
Я по-прежнему предпочитаю программирование экспонометра Nikon. У Nikon N90 было целое
куча датчиков прямо в самом центре изображения, что делает
впечатляющее количество датчиков, но не имеет ничего общего с расходомером
способность. С N9 все в порядке.0-й метр; просто N90
звучит как игрушка, когда он работает.
Цветовой матричный метр F5 должен быть экстраординарным. Вот почему Канон
контрактный фотограф Артур Моррис сказал, что лучшая в мире камера
это никон ф5. Я не пробовал, потому что если бы я это сделал, я уверен, что накручиваю
до того, чтобы буксировать F5 повсюду. я упряма не
пытаясь F5, вы не должны быть. Точность счетчика важнее всего
аспект качества изображения, обеспечиваемый камерой, и почему я снимаю с
Никон.
Это статья относится к обычному счетчику Matrix, введенному в FA в 1983 г. и используется по сей день во всех зеркальных фотокамерах Nikon AF.
БАЗОВЫЙ ПОЯСНЕНИЕ
см. полная оригинальная документация здесь>>
Гадание тип вашей темы
Матричный замер сначала пытается угадать, что вы фотографируете (жесткий часть), а затем производит соответствующий расчет экспозиции (простая часть).
Вы
возможно, читал, что измеритель Matrix сравнивает показания освещенности с «более
30 миллионов миллиардов изображений, хранящихся на борту» или что-то другое.
вздор. Этих изображений нет в камере. Что делает камера, так это
использовать опыт, полученный от профессиональных фотографов и анализируя
много, много фотографий (это ваше число 30 000), чтобы помочь программе
прошивка камеры, чтобы распознать, какую фотографию вы пытаетесь
сделать. После того, как он классифицировал ваше изображение, он может сделать лучший
расчеты для вашей экспозиции.
камера классифицирует изображения, как показано на стр. 5 документации.
Солнечный свет белые значения
Эти метров также используется очень важное наблюдение: солнце всегда примерно так же ярко в ясный день, как и в любой другой ясный день. Если камера видит что-то выше яркости серой карты при солнечном свете (LV15), он знает, что что-то видит светлее серого. Он знает это, потому что он достаточно умен, чтобы знать, что солнце не просто стало в два раза ярче.
Когда он видит что-то, что нужно сделать светлее, он намеренно «пересвечивает» по сравнению с тупым счетчиком, чтобы легкие предметы выглядели светлыми.
Это
простое применение зональной системы; если счетчик увидит что-то две остановки
выше, где была бы серая карта при дневном свете (LV15
+ 2 стопа = LV17) значит умеет «передерживать» этот участок
две остановки, чтобы он выглядел белым, а не серым.
Если Матричный измеритель видит сегменты, которые действительно яркие, скажем, что-нибудь выше LV 16-1/3, он их просто игнорирует. Он знает, что они представляют собой яркие моменты или прямого солнечного света, и не следует использовать их для расчета экспозиции. Это вместо этого придает больший вес другим сегментам.
Абсолют уровни освещения
Угадать ваш тип объекта и определите, что на самом деле является белым в солнечном свете Матрица необходимо знать абсолютный уровень освещенности снаружи камеры. Помните что свет внутри камеры будет отличаться от уровня света вне камеры в зависимости от светосилы (f/stop) вашего объектива.
Поэтому
Матрица должна считывать истинную диафрагму объектива. Камера FA читала
это со специальным новым выступом на задней панели AI и более новыми линзами. камеры автофокуса
прочитать это в электронном виде. Другим камерам это не нужно, так как они
не пытался угадать, что за объект вы фотографируете и поэтому
были счастливы, только зная, сколько света проходит через вашу линзу в
фильм.
Для Например, Матрица знает, насколько ярок дневной свет, поэтому она знает, видит ли она что-то достаточно яркое, чтобы быть ярким песком на полном солнце, оно знает чтобы добавить экспозиции, чтобы он выглядел светлым, а не просто серым.
Если камера не может определить фактическую максимальную диафрагму объектива, тогда она не может определять абсолютные уровни освещенности и не может выполнять матричный замер.
Абсолют соединение с максимальной апертурой
Руководство
Объективы AI имеют специальную внутреннюю механическую соединительную проушину сзади. объектива, который сообщает F4 и FA, какова точная максимальная диафрагма,
как f/4 или f/2.8. Все объективы AF имеют одинаковые механические выступы для
FA и F4 (спасибо, Nikon), а также имеют электронные контакты для
камеры автофокуса.
Черт возьми,
камера также хочет знать светосилу объектива, и я думаю
это также закодировано в глубине механического выступа. Камера использует
это, чтобы получить правильные показания для сегментов счетчика по бокам
изображение. Это полностью отличается от выступа на внешней апертуре.
кольцо, которое сообщает камере связь между апертурой вы
выставить на объектив и максимальную диафрагму. Я не думаю, что камеры были
когда-либо предназначенный для механического считывания спада, как и объективы с искусственным интеллектом.
иметь механический выступ для соединения фокусного расстояния объективов с камерами
которые никогда не были построены.
Все Камеры AF считывают диафрагменное число через электронные контакты. Кроме F4. ни одна камера AF не имеет щупа для считывания механического выступа с задней стороны мануальные объективы, поэтому все камеры с автофокусом (кроме F4) будут вернуться к центрально-взвешенному, когда вы устанавливаете объектив с ручной фокусировкой или телеконвертер на них. Это дефект конструкции автофокусных камер, вероятно, спроектированный чтобы заставить вас купить новые объективы AF.
я верю что объективы АФ тоже говорят Матрице о спаде освещенности чтобы он мог более точно измерять углы изображения.
Использование с телеконвертерами
единственный способ получить настоящий матричный замер на камере с автофокусом — это использовать TC-14E.
или ТС-20Э (или новые версии «II»). Они работают только с
экзотические телеобъективы AF-I и AF-S.
Там нет другого способа получить реальный матричный замер с другими TC на камерах AF кроме F4.
Чтобы получить Матрица с объективами с ручной фокусировкой на ФА или Ф4 нужен ТЦ который к нему добавлен еще один щуп, чтобы связать информацию об абсолютной апертуре механически. TC-201 имеет эту муфту. ТС-200 нет. Руководство ТП фокуса не дают ни автофокусировки, ни матричного замера при использовании на камеры автофокуса.
как ни странно это означает, что для получения матричного замера с любым объективом, кроме AF-I или объектив AF-S и телеконвертер, вы должны использовать старый F4 или FA и ТС-201 или ТС-301 (или, кажется, ТС-14А или В). В противном случае вы не можете получить Матрицу с телеконвертером и любой другой AF камерой!
Когда
вы не можете получить матрицу на камере, она по умолчанию центрально-взвешенная, если вы
выбрали Матрицу. Большинство камер с автофокусировкой говорят вам об этом на шкале экспонометра.
показатель. FA не имеет индикатора шаблона счетчика.
От то, что я видел, телеконвертеры со скидкой, такие как Kenko PRO, Tamron, Sigma и Токина не правильно привязывают максимальную диафрагму к камерам AF и иногда сбивает с толку Матрицу, особенно при ярком свете. Если ваш TC позволяет вам получить отмеченную максимальную диафрагму на вашей камере AF у вас неподходящая муфта . Камера AF должна указывать только один или на два шага меньше максимальной диафрагмы в камере, чем указано на объективе при использовании ТС.
Что про 3D замер и D объективы?
Вы можете смело игнорировать это, если вы покупаете линзы б/у.
ЛинзыD
помогите измерителю немного угадать, что вы пытаетесь сфотографировать. Это имеет очень небольшой эффект.
Потому что впечатлительные люди ошибочно полагают, что объективы D служат каким-то замечательным С этой целью вы можете получить очень хорошие объективы без D по дешевке, используемые сегодня.
В процессе изготовления преднамеренные тесты объективов D и не D с одним и тем же субъектом в одно и то же время время я не видел никаких различий. Единственный раз, когда я увидел разницу делает единственное, для чего они хороши: создание фотографий со вспышкой прямо в зеркало.
единственный объектив без D AF, сделанный сегодня, — это прекрасный 50mm f/1.8 АФ. Это сделка.
3D измерение можно смело игнорировать.
Цвет Матричный замер
F5 повышает ставку, добавляя чувствительность к цвету. Это, в отличие от 3D, очень
важный. Это позволяет F5 сделать желтый цвет таким светлым, каким он должен быть.
и красный такой темный, каким и должен быть.
Цвет, вместе со всеми сегментами в измерителе F5 также позволяют камере более точно угадать, какой у вас объект, что, в свою очередь, позволяет камере чтобы применить к вашей фотографии потенциально более точный алгоритм замера.
Это особенность F5 уникальна среди всех пленочных камер.
НАКОНЕЧНИКИ
Когда использовать матрицу
проще всего во всем доверять измерителю Matrix; будет быть правильным чаще, чем способность большинства людей отвергать общепринятые метр.
Понять
как работает матричный замер, требует знания системы зон (см.
книги в справочном разделе), а также EV
и низковольтные системы. Как только вы их поймете, прочтите
документация на счетчики. Никон сегодня так много не рекламировал,
что очень жаль, потому что без этой информации это намного сложнее
чтобы узнать, как и почему измеритель Matrix делает то, что он делает.
Для технически грамотным фотографам матричный измеритель очень предсказуем и легко компенсировать при необходимости, но это гораздо сложнее, чем усредняющие метры. Именно эта сложность делает измеритель Matrix таким хорошим, но также и то, что делает обучение таким трудным и почему некоторые фотографы все равно не верь.
Когда и как пользоваться вспышкой
Использование
Заполнение матрицы мигает все время, если вы специально не хотите, чтобы
объект выделен или заморожен при слабом освещении. Возможности Nikon Matrix
сбалансировать вспышку и естественный свет не имеет себе равных. Используйте МЕДЛЕННУЮ ЗАДНЮЮ синхронизацию
в помещении, чтобы фон выглядел естественным.
Использование настройка Matrix, которая на старых вспышках (SB-22, SB-23) установлена по умолчанию настройки, а на более новых вспышках (SB-28) отображается символом TTL и маленький пятисегментный символ Matrix на ЖК-дисплее вспышки.
Марка убедитесь, что у вас достаточно мощности вспышки и дальности действия в очень контрастных местах. (например, при съемке против солнца), в противном случае выключите вспышку. Вот почему:
В отличие от
свет, матричный измеритель уменьшит экспозицию окружающего света на
вплоть до 2/3 ступени, чтобы уменьшить очень яркие блики до
диапазон пленки, ожидая, что вспышка заполнит еще темнее
тени. Обычно это дает отличные результаты, так как у вас обычно достаточно
мощность вспышки, чтобы заполнить тени.
Если вы находятся на улице, а контрастные объекты находятся вне зоны действия вспышки, включив ваша вспышка на самом деле может привести к недодержке на целых 2/3 ступени для всей сцены, так как внешняя экспозиция уменьшается, а вспышка не сможет заполнить тени! Не волнуйтесь, вы увидите недостаточную в этом случае мигает индикатор мощности вспышки. Только не предполагай, что только заливка будет слишком темной, потому что у вас также может быть рассеянный свет недоэкспонированные тоже на улице. Я потратил несколько рулонов один раз, стреляя в подсвеченные деревья и игнорируя мой индикатор недостаточной мощности вспышки (быстро мигающий индикатор готовности), думая, что только заполнение будет немного темнее. Все кадры были слишком темными; Я должен был просто повернуться выключить вспышку.
Вы
можете подтвердить этот эффект, просто наведя камеру на очень контрастный
место действия. Включайте и выключайте вспышку, наблюдая за указанной экспозицией.
по метру. Вы увидите, что экспозиция уменьшается, когда вспышка поворачивается.
в очень контрастном свете.
Что об использовании блокировки AE в Matrix?
Это работает просто хорошо. Я это делаю, хотя и редко.
Матричный измеритель работает, сначала угадывая, что вы фотографируете (жесткий часть), а затем соответствующим образом установить экспозицию (простая часть).
Если вы заблокировать его на что-то другое, тогда вероятность того, что счетчик сможет угадайте правильно, каков ваш настоящий предмет. Если вы достаточно преднамеренны чтобы зафиксировать экспозицию, лучше сделать это с центрально-взвешенным метр.
Именно по этой причине в первой камере Matrix, FA, не было кнопки блокировки.
Темы что может обмануть Матрицу
Матричный измеритель оттачивался более 20 лет. Это о единственные предметы, которые дурят его сегодня:
1.) Преимущественно светлые предметы, не находящиеся под прямыми солнечными лучами. Поскольку эти недостаточно яркие в абсолютном выражении (LV16 или выше) Матрица не может догадаться, что они должны быть светлыми. Это будет иметь тенденцию отображать их как серые. Если ваш объект одновременно темный и светлые участки матрица в порядке. Если все изображение представляет собой белую карточку в оттенок, то вам все равно придется набирать + компенсация, чтобы сделать белая карта выглядит белой.
2.)
Яркое пасмурное небо. Они достаточно темные, чтобы метр не мог сказать
что вы хотите, чтобы они выглядели почти белыми на вашем изображении, потому что они
ниже LV16. Вам нужно будет набрать + 1
или даже компенсация +2, если ярко-серое небо занимает большую часть вашего изображения,
скажем, фотографируя летящих птиц на фоне ярко-серого неба.
3.) Глубокие или темные фильтры. Помните, что счетчик должен знать абсолютное Легкая ценность предмета, как объяснено выше в разделе «Абсолютные уровни освещенности».
Если вы поместите темный фильтр, например, поляризатор, на линзу, тогда вы можете обмануть матрица, думая, что у вас другой предмет, потому что передача фильтра , а не , переданная Матрице метр.
Если вы
наденьте фильтр на линзу, которую вы только что перепутали с матричным замером. Свет
фильтры, такие как УФ, просвет или А2 (81А) поглощают только треть ступени
самое большее, поэтому наихудшая ошибка, которую эти фильтры внесут, составляет 1/3
остановите недодержку на снегу или других очень ярких сценах. Вы можете игнорировать
это, и я делаю.
Однако, давайте рассмотрим поляризатор с коэффициентом фильтрации 2 ступени. С поляризатором ваша камера увидит то, что она считает LV15, когда смотрит на яркий песок или снег, вместо правильного LV17. Из-за этого счетчик не может скажите, что на вашем изображении ярко-белый солнечный свет, и вы можете получить непреднамеренная недодержка.
я не слишком много беспокоюсь об этом, но опять же, я не часто использую поляризаторы.
Помнить это если у вас очень яркие условия.
Вы
может захотеть сделать ручное чтение Матрицы без фильтра, блокировки AE, что
чтение, а затем добавьте этот коэффициент фильтра в качестве значения компенсации после
добавление фильтра. На самом деле, если вы собираетесь пойти на такие большие проблемы
с тем же успехом вы можете просто использовать точечный измеритель Pentax и камеру обзора, но это
иллюстрирует потенциальные проблемы.
Это это еще одна причина выбрать поляризаторы марки Nikon: они теряют только 1-1/3 стопов света, а не 2, как у большинства других поляризаторов.
4.) Предметы средней освещенности на солнце, например, калифорнийская штукатурка. Для вещей, которые вы хотите визуализируется как Зона VI, светлая, но не белая, одна из самых ранних Измерители Matrix и AMP сделали их немного темными, ближе к зоне 18%. V. В этих случаях вам нужно было набрать около +2/3 компенсации. Современный (F100) матричные замеры, кажется, подходят для этих объектов.
Какой камеры дают матричный замер с какими объективами?
Все
нынешние камеры AF, да и большинство старых тоже дают матричный замер с
все объективы с автофокусом. Ни один из них, кроме F4, не умеет делать это с ручной фокусировкой
линзы.
Никон умышленно покалечил камеры АФ, кроме F4, чтобы они только дают центрально-взвешенный замер с объективами с ручной фокусировкой. Никон наверное сделал это, чтобы побудить вас покупать новые объективы AF, чтобы получить очень важный матричный замер. Камера F4 AF и ручная фокусировка FA камеры имеют механические энкодеры, позволяющие этим камерам считывать максимум абсолютный f/stop от выступа на объективе. Это необходимо для матрицы функционировать. Поскольку во всех других камерах AF нет этих кодировщиков, они не могут дайте матричный замер с мануальными объективами.
Там это маргинальные группировки, которые прикрепляют чипы к объективам с ручной фокусировкой, чтобы обмануть автофокусировку. камеры в матричный замер. Эти наверное работают.
Никон
добавляет фишки двум мануальным объективам: старому 500mm f/4 P AI-s и новому
45mm f/2. 8 P, так что эти два объектива уникально обеспечивают матричный замер на
все камеры с автофокусом.
Чтобы получить матричный замер с объективами с ручной фокусировкой используют либо камеру F4 AF, или камера с ручной фокусировкой FA.
Все Объективы AI и AI-s с ручной фокусировкой, а также объективы AF, AF-I и AF-S обеспечивают матричный замер на FA и F4. Единственные, которые не являются объективами до AI, были раньше. 1977.
до 1977 г. объективы, которые были преобразованы AI, не будут давать матричный замер на F4 или FA, если к задней части объектива не добавлен специальный выступ. Вы можете преобразовать древний объектив с искусственным интеллектом примерно за 25 долларов, но то же самое парень хочет около 200 долларов, чтобы добавить этот специальный выступ. Забудь об этом.
Также
Объективы с ручной фокусировкой дают только автоматизацию с ручной и диафрагменной предпочтительной автоматизацией
в лучшем случае на камерах AF.