размер матрицы фотоаппарата | Мир сквозь призму
Многие уже в курсе того, что нужно знать, выбирая цифровой фотоаппарат.
Сегодня поговорим о таком важном элементе, как матрица фотоаппарата и ее разрешении.
1. Мегапиксели
Реклама пестрит: мегапиксели! Почему-то убеждая покупателя, что чем больше этих самых мегапикселей, тем лучше снимает камера.
Наверное, стоит пояснить, что такое пиксель. Пиксель – это элемент изображения, который состоит из 5ти частей, несущих информацию: яркость красного, яркость зеленого и яркость синих цветов, а также координаты по вертикали и горизонтали.
Эти данные позволяют процессору камеры правильно определять положение точек на матрице и их цвета. Все вместе пиксели образую кадр. В Мегапикселях (миллион пикселей) измеряют размер фотографии или отсканированного снимка.
2. Размер матрицы фотоаппарата
Однако матрица камеры, на которую записывается информация, имеет определенные размеры.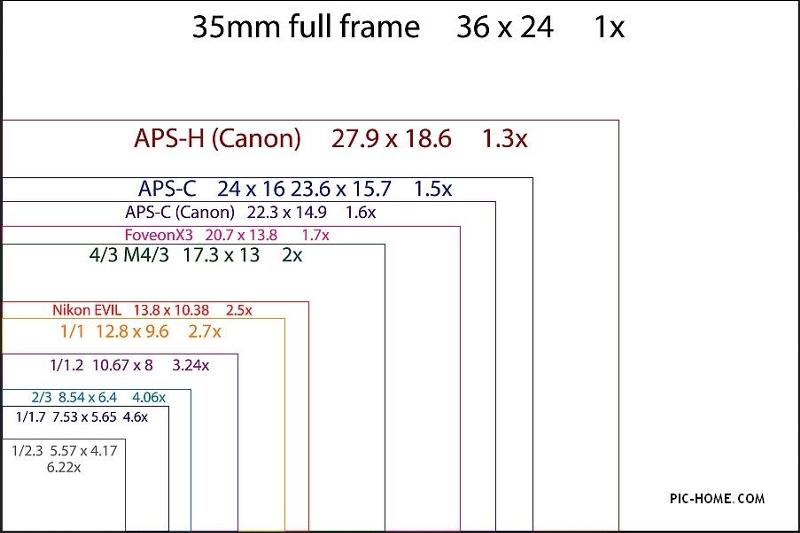
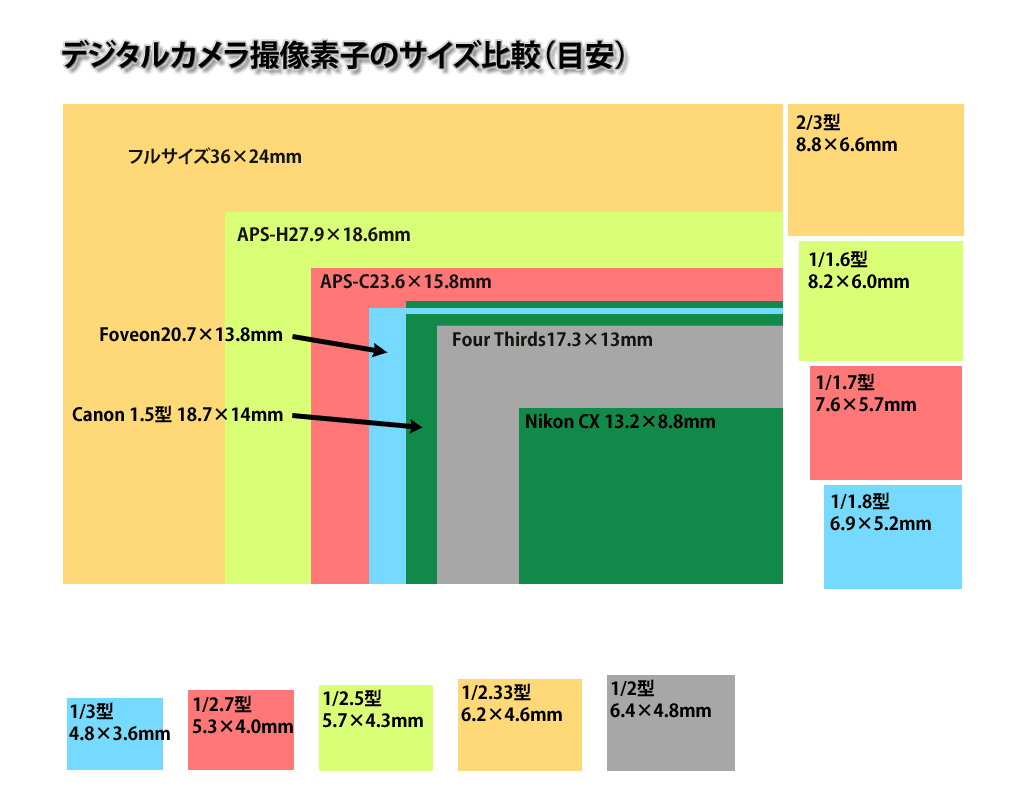
Ниже вы можете увидеть соотношение физических размеров матрицы некоторых моделей цифровых фотоаппаратов к стандартному размеру пленки в 35 мм. У компактов размер матрицы принято указывать в виде формулы 1/х ” (где «х» может быть целым или дробным числом, например 1/1,7, 1/2,5 и т. п.), а у зеркальных камер указываются физические размеры матрицы в мм (например, 22,2×14,8 мм или 24х36 мм).
Компактные камеры:
- Матрица размером 1 / 3.2″ – самые маленькие матрицы, соотношение сторон 4:3, физический размер 3.4 х 4.5 кв.мм;
- Матрица размером 1 / 2.7″ , соотношение сторон 4:3, физический размер 4.0 х 5.4 кв.мм;
Хорошие компактные камеры и псевдозеркалки
- Матрица размером 1 / 2,5″, соотношение сторон 4:3, то есть 4,3 х 5,8 кв.мм;
- Матрица размером 1 / 1,8″ , соотношение сторон 4:3, геометрический размер 5,3 х 7,2 кв.
 мм;
мм;
Дорогие компактные камеры и компактных камерах со сменной оптикой
- Матрица размером 2 / 3″ , соотношение сторон 4:3, физический размер 6,6 х 8,8 кв.мм ;
- Матрица размером 4 / 3″ , физический размер 18 х 13,5 кв.мм, соотношение сторон 4:3;
Бюджетные и полупрофессиональные зеркальные камеры
- DX, APS-C формат, соотношение сторон 3:2, размер около 24 х 18 кв.мм. Матрицы таких размеров соответствуют “полукадру” 35 мм кадра.
3. Как это все совмещается
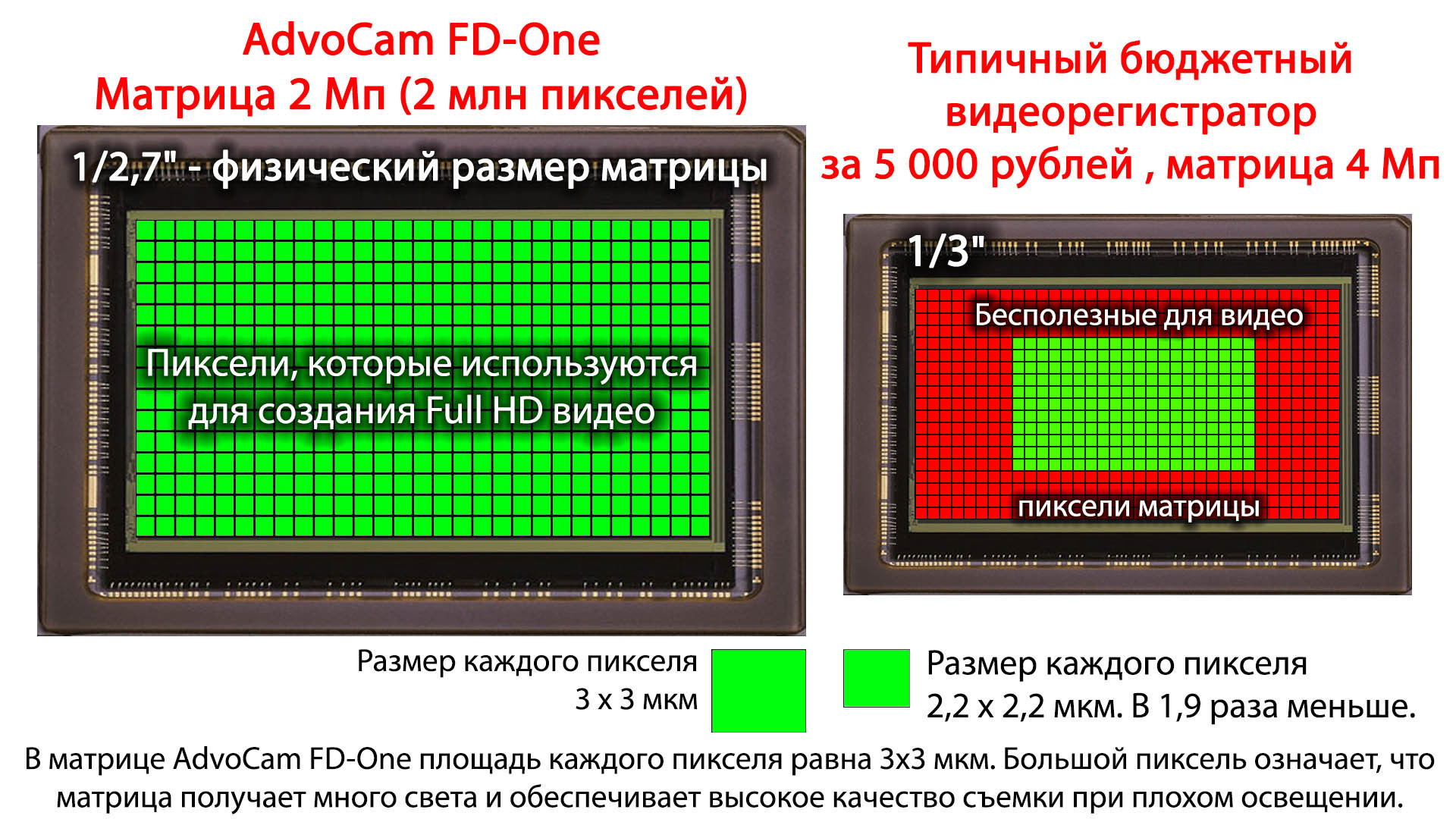
Чем больше размер матрицы фотоаппарата, тем комфортнее чувствуют себя светочувствительные элементы – пиксели: расстояние между ними больше, перегреваются они меньше и, следовательно, лучше восприимчивость матрицы к свету. И тем качественнее получится снимок. Даже при одинаковом количестве пикселей качество фотографий с разных фотокамер может оказаться разным.
Что бы ни кричала реклама, число мегапикселей определяет лишь максимальный размер отпечатка, который можно получить с фотографии.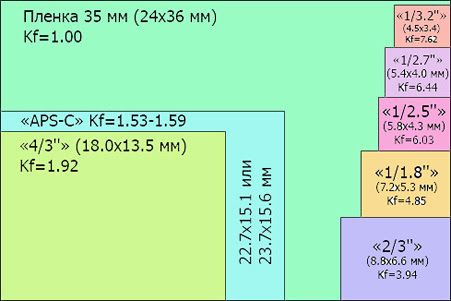 И совсем уж мегапиксели не связаны с качеством изображения в отличие от размера матрицы цифровых фотоаппаратов. Ведь по факту даже разрешения 2 Мп достаточно, чтобы напечатать изображение хорошего качество размером 10*15. А 4Мп подойдут прекрасно для фотографии формата А4.
И совсем уж мегапиксели не связаны с качеством изображения в отличие от размера матрицы цифровых фотоаппаратов. Ведь по факту даже разрешения 2 Мп достаточно, чтобы напечатать изображение хорошего качество размером 10*15. А 4Мп подойдут прекрасно для фотографии формата А4.
Поэтому гораздо более важно не количество пикселей, а их размер. Ведь если на маленькую матрицу запихнуть, скажем, 8Мп, то они будут очень маленькими. А чем меньше размер пикселя, тем выше уровень шума изображения. В компактных камерах и большинстве зеркалок нежелательные эффекты сглаживает встроенная программа шумоподавления, но эффект от нее — замыленность снимка.
Большое количество компактных любительских камер имеет разрешение матрицы фотоаппарата от 5 до 12 Мп, у зеркалки же этот диапазон составляет от 8 до 21 МП, при этом размер матрицы гораздо больше. В настройках камеры всегда можно выбрать разрешение снимка. Советую устанавливать этот параметр, ориентируясь на золотую середину, – такого разрешения вполне достаточно, чтобы получить четкую и красочную картинку.
Чтобы лучше объяснить соотношение количества пикселей и размера матрицы, приведу простой пример. Допустим, нужно посадить на грядке кусты клубники. Чем больше грядка, тем больше кустов можно посадить. Но если попытаться втиснуть на кусок земли 20 кв.м. 5 кустов, то в итоге вырастет сорняк.
Так и с пикселями: количество пикселей может быть одинаковым, но у «взрослой» камеры они будут на большей площади и смогут собрать больше света. А больше света — это, как правило, меньше шума и более широкий динамический диапазон.
Надеюсь, я все доступно объяснила. Удачи вам в выборе фотокамеры!
Матрица цифровой камеры. Типы и размер матриц
Выбирая цифровую камеру для микроскопа или телескопа, часто обращают внимание лишь на разрешение матрицы, т.е. количество мегапикселей. Однако это не единственный важный параметр цифровой камеры, определяющий качество полученных фотоснимков и видеороликов.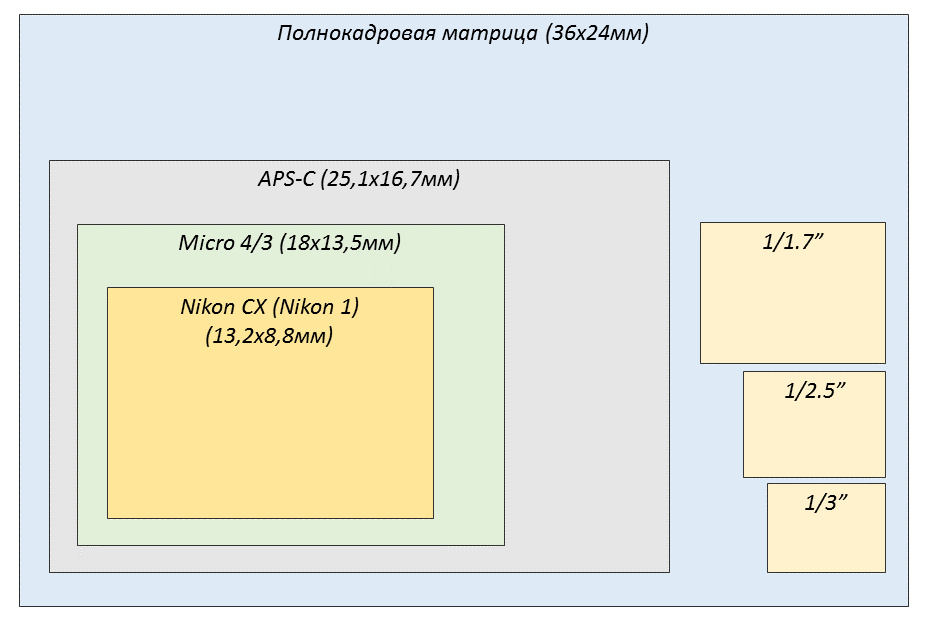 По каким же признакам следует выбирать цифровую камеру, и чем они могут отличаться одна от другой?
По каким же признакам следует выбирать цифровую камеру, и чем они могут отличаться одна от другой?
Главным элементом цифровой камеры является ее матрица, которая, собственно, и фиксирует изображение в цифровой камере. Отметим, что также в техническом описании цифровых камер часто употребляется и термин сенсор, обозначающий то же, что и матрица. Матрица состоит из массива светочувствительных ячеек, и именно от нее зависит качество изображения, полученного с помощью цифровой камеры.
Существует два основных типа матриц: CCD (ПЗС матрицы) и CMOS (КМОП матрицы), отличающиеся по применяемой технологии. И если на рынке фотоаппаратов наиболее распространены цифровые камеры с ПЗС матрицей, то большинство моделей цифровых камер для телескопов и микроскопов имеют именно КМОП матрицу.
Чем же отличается ПЗС матрица от КМОП матрицы? Основным их отличием является то, что в ПЗС матрицах информация из ячеек считывается последовательно, в то время как в КМОП матрицах информация считывается индивидуально из каждой отдельной ячейки.
Первым делом при выборе цифровой камеры мы рекомендуем Вам обратить внимание на размер матрицы. Физическим размером матрицы называется ее геометрический размер, т.е. длина и ширина матрицы, выраженные в мм. Физический размер матрицы определяет ее качество. Узнать значение этого параметра можно из ее технического описания, хотя, как правило, размеры фотосенсоров производители указывают не в мм, а введя специальное обозначение типа матрицы в виде дробных частей дюйма, например: 1/4″, 1/3″, 1/2.
Какая же связь между физическим размером матрицы, указанным в мм и типом матрицы, выраженном в 1/дюйм? Отметим, что введенное обозначение типа матрицы выражает не размер ее диагонали, а внешний размер колбы передающей трубки. Обратите внимание на то, что не существует конкретной математической формулы, четко выражающей взаимосвязь между устоявшимся обозначением типа матрицы, выраженного в 1/дюйм, и самим физическим размером диагонали матрицы в мм. Тем не менее, в грубом приближении принято считать, что диагональ сенсора равна двум третям его типоразмера.
|
Размеры в мм |
Тип матрицы |
|
4. |
1/3.2″ |
|
5.4х4.0 |
1/2.7″ |
|
5.8×4.3 |
1/2.5″ |
|
6.2×4.6 |
1/2.3″ |
|
7.2×5.3 |
1/1.8″ |
 5х3.4
5х3.4Вполне целесообразно задать вопрос, а на что же влияет размер матрицы? Прежде всего, сколь иронично это бы не звучало, размер матрицы цифровой камеры влияет на ее стоимость и вес.
Помимо этого, как мы уже отмечали ранее, размер сенсора влияет на качество полученных фотоснимков и видеороликов. Во-первых, от размера сенсора зависит количество цифрового шума, который передается на светочувствительные элементы матрицы вместе с основным сигналом.
Из-за цифрового шума полученные снимки получают неестественный вид, в связи с чем возникает такое ощущение, что сверху на снимок наложена маска из точек различного цвета и яркости.
Причинами возникновения шумов могут быть дефекты в структуре сенсора, токи утечки (заряд может пробивать изоляцию и переходить с одного пикселя на другой), нагрева матрицы (так называемый тепловой шум, когда при повышении температуры на 6-8 градусов шум увеличивается в 2 раза) и пр.
Конечно же, нужно понимать, что абсолютно бессмысленно рассматривать показатель шума отдельно – важно соотношение сигнал / шум.
Итак, на количество шумов главным образом влияет физический размер матрицы, а также размер пикселя. Чем больше физический размер сенсора цифровой камеры, тем больше его площадь и, соответственно тем больше света попадает на него. А, следовательно, полезный сигнал матрицы будет сильнее и, значит, мы получим лучшее соотношение сигнал / шум, что обеспечит более яркое и качественное изображение с более правильной и естественной цветопередачей.
Помимо этого, отметим, что слой изоляции, разделяющий пиксели друг от друга, будет толще для пикселей большого размера. Разумеется, что чем толще слой изоляции, тем меньше зарядов смогут пробить ее. Следовательно, токов утечки будет тоже меньше, что соответственно приведет и к уменьшению шумов.
В качестве примера предлагаем Вам представить матрицу определенного размера. Предположим, что на одной такой матрице 3000 пикселей (3 Мпикс), а на второй такой же матрице расположено 5000 (5 Мпикс). А теперь представьте толщину изоляции пикселей для первого и для второго случая!
Еще раз отметим, что чем меньше матрица, тем меньшее количество света на нее попадает. В таком случае Вы получаете слабый полезный сигнал, который приходится усиливать. А с усилением полезного сигнала естественно усиливаются и становятся более заметными шумы.
В заключение еще раз повторим, что чем больше физический размер матрицы, тем большее количество света на нее попадает, а значит, тем более качественно изображение Вы получите.
Автор статьи: Галина Цехмистро
Типы и размеры матриц камер видеонаблюдения
Светочувствительная матрица — важнейший элемент видеокамеры, который обеспечивает качество изображения на 90%. Представляет собой интегральную микросхему, состоящую из фотодиодов. Сенсор генерирует видеопоток, преобразуя проецируемое в него оптическое изображение в аналоговые электрические импульсы. В сетевых видеокамерах эти импульсы сразу преобразовываются в цифровой поток данных за счет наличия в системе АЦП, сразу обрабатывающего сигнал.
Сенсоры имеют ряд характеристик, важнейшие из которых — вид, разрешение и размер матрицы камеры видеонаблюдения. От этих параметров зависит быстродействие устройства, уровень его энергозатратности, а также конечное качество воспроизводимого камерой видео.
Типы матриц, которые используют в современных камерах видеонаблюдения
- CCD (ПЗС). Характеризуются лучшей светочувствительностью, обеспечивают хорошую цветопередачу и низкий уровень шума на изображении.
Это достигается за счет последовательного считывания зарядов в каждой ячейке сенсора. Однако принцип действия таких матриц слишком медленный и не удовлетворяет современное видеонаблюдение с большими разрешениями и высокой кадровой частотой. Кроме того, такие сенсоры энергозатратны, дороже в производстве и сложнее в эксплуатации. В современных цифровых камерах важно какая матрица используется. Поэтому, чтобы не тормозить процесс передачи видеопотока, технологию CCD практически не применяют;
- Live-MOS. Разработка компании Panasonic. Применяется для трансляций «живого» изображения за счет технологии, которая позволяет упрощенно организовать передачу сигналов управления и преобразование света в электрические импульсы. Для технологии характерно меньшее напряжение электропитания, перегрев и уровень шумовых помех;
- CMOS (КМОП). Главное достоинство — более низкое энергопотребление. Ячейки в сенсоре считываются в произвольном порядке, что позволяет избежать размытия изображения при съемке движущихся объектов.
 Камерой с типом матрицы CMOS гораздо проще управлять, поскольку большая часть электроники расположена на ячейке. Однако такая конструкция сенсора уменьшает светочувствительную площадь.
Камерой с типом матрицы CMOS гораздо проще управлять, поскольку большая часть электроники расположена на ячейке. Однако такая конструкция сенсора уменьшает светочувствительную площадь.
Для современного видеонаблюдения в соотношении быстродействия, энергопотребления и цены КМОП матрицы предпочтительнее. Поэтому крупнейшие производители камер сосредоточились на закупке или производстве собственных CMOS сенсоров. Например, компании Hikvision и Dahua разрабатывают собственные светочувствительные элементы, которые использует при производстве оборудования. В топовых видеокамерах Dahua DH-SD50430I-HC-S2 или HIKVISION DS-2CD2942F используются именно КМОП матрицы.
DH-SD50430I-HC-S2
Видеокамера HDCVI Скоростная купольная поворотная 4Мп разрешения
DS-2CD2942F
Панорамная купольная камера Fish Eye с высоким разрешением до 4Мп
ПЗС или КМОП матрица?Размеры матриц видеокамер наблюдения
Физические размеры матриц выражаются условной длиной, приведенной к диагонали видикона.
Видикон — родоначальник современной фото- и видеотехники. Его диаметр равнялся 1 условному дюйму при рабочей диагонали 16 мм. «Видиконовый дюйм» принят стандартом для определения типоразмера матрицы. Таким образом, если указано, что сенсор имеет размер 1/2”, это значит, что его диагональ равна 8 мм.
Современные видеокамеры чаще всего используют следующие типоразмеры: 1/2”; 1/3”; 1/4”; 1/6” и реже 1/10”.
На что влияет размер матрицы в камере?
От диагонали сенсора напрямую зависит качество изображения. Чем больше размер матрицы, тем крупнее у нее пиксели, следовательно, они улавливают большее количество света и расположены менее густо. Это позволяет уменьшить уровень помех, наводок и паразитных шумов. Кроме того, крупные сенсоры дают большие углы обзора для оптики с одинаковым фокусным расстоянием.
Какой размер матрицы лучше для видеокамеры
Это зависит от конкретных задач, стоящих перед видеонаблюдением. Важно помнить, что при выборе устройства характеристики нужно рассматривать комплексно. Например, хорошее разрешение при маленьком размере сенсора дадут плохое изображение. Кроме того, чем больше матрица, тем она дороже. Поэтому при выборе видеокамеры необходимо рассматривать вариант, в котором будут учитываться оптимальное соотношение трех показателей, удовлетворяющих потребности видеонаблюдения — это цена, разрешение и типоразмер.
Важно помнить, что при выборе устройства характеристики нужно рассматривать комплексно. Например, хорошее разрешение при маленьком размере сенсора дадут плохое изображение. Кроме того, чем больше матрица, тем она дороже. Поэтому при выборе видеокамеры необходимо рассматривать вариант, в котором будут учитываться оптимальное соотношение трех показателей, удовлетворяющих потребности видеонаблюдения — это цена, разрешение и типоразмер.
Типы и размеры матриц камер видеонаблюдения
Разберем характеристику первой попавшейся камеры.
| Матрица | 1/4″ Progressive Scan CMOS |
| Эффективных пикселей | 1Мп, 1280 х 720 |
Такую таблицу вы встретите на странице каждой камеры, меняются лишь значения, подставляемые к перечню характеристик. Как понять, что вам нужно и на какие данные стоит обратить внимание в первую очередь? Ведь матрица – это и есть та главная часть камеры, которая получает изображение, как фотопленка в старых фотоаппаратах.
Рассмотрим типы матриц. И начнем от обратного. Матрицы, не использующиеся Hikvision – CCD-матрицы.
По сравнению с технологией CMOS, которую применяет в своих камерах Hikvision, CCD-матрицы позволяют создавать высококачественное изображение. В процессе съемки возникает гораздо меньше шумов, а бороться с все же возникшими намного легче, чем в матрицах CMOS.
Еще одним важным показателем является их высокая эффективность. Например, коэффициент заполнения у матриц CCD приближается к 100%, а соотношение зарегистрированных матрицей фотонов к их общему числу – 95%. Если сравнивать с нашими глазами, то при расчёте в тех же единицах соотношение составит только 1%.
К недостаткам CCD-матриц можно отнести сложность процесса. Для фиксации изображения в камере необходимо дополнительное наличие целого перечня устройств. Это приводит к более высокому энергопотреблению, делает их дороже в производстве и “капризнее” в эксплуатации.
Теперь о CMOS-матрицах.
Главное достоинство CMOS-матриц – более низкое энергопотребление и возможность произвольного считывания ячеек, а это CCD-матрице недоступно, там считывание происходит одновременно. Благодаря произвольному считыванию в CMOS-матрицах нет размазывания изображения.
Еще одно достоинство – расположение значительной части электроники непосредственно на ячейке, благодаря этому появляются широкие возможности управления матрицей и изображением.
При всех имеющихся достоинствах данной технологии, недостатков хватает. Главный – незначительный размер светочувствительного элемента в соотношении к общей площади пикселя. Одно из основных достоинств – расположения электроники на ячейке. Но из него вытекает еще один недостаток – значительная часть площади пикселя занята электроникой, а значит, уменьшена площадь светочувствительного элемента.
В то же время нельзя не отметить, что CMOS был модифицирован несколько лет назад, и для видеонаблюдения CMOS-матрицы действительно подходят лучше (благодаря чёткому изображению, низкому энергопотреблению и возможности уменьшать битрейт видео.
Что такое матрица? Кроп-фактор?
Прежде, чем купить фотоаппарат, вам необходимо ответить на ряд очень важных вопросов: сколько мегапикселей должна иметь матрица фотоаппарата, будет ли это полнокадровый фотоаппарат или камера с так называемой кропнутой матрицей, а также будет это зеркальный или беззеркальный фотоаппарат? Давайте разберемся с этими понятиями по порядку.
Матрица – это часть фотоаппарата, которая предназначена для регистрации света, проходящего через объектив. По сути, матрицы цифровых фотоаппаратов это аналог фотопленки в пленочных камерах. Матрица состоит из множества светочувствительных элементов – пикселей. Пиксели настолько маленькие и их так много, что для обозначения их количества используют приставку мега-, которая означает миллион. Чтобы понять, какое количество мегапикселей нужно именно вам, нужно определиться, для каких целей вы приобретаете камеру. Если вы планируете использовать ее в личных целях, для съемки бытовых сюжетов и в путешествиях, то вам вполне подойдут камеры с матрицами больше 10 мегапикселей. Если же планируется использовать камеру в коммерческих целях, то стоит задуматься над покупкой камеры с 20-мегапиксельной матрицей. Однако, стоит предостеречь вас от погони за огромными значениями этого параметра. Дело в том, что физический размер матрицы с ростом числа мегапикселей не изменяется, а, следовательно, физический размер самого пикселя будет уменьшаться. Матрицы с 30 и более мегапикселями очень требовательны к качеству применяемой оптики, а также, как правило, они сильнее нагреваются и на изображении появляется цифровой шум, ухудшающий качество.
Если же планируется использовать камеру в коммерческих целях, то стоит задуматься над покупкой камеры с 20-мегапиксельной матрицей. Однако, стоит предостеречь вас от погони за огромными значениями этого параметра. Дело в том, что физический размер матрицы с ростом числа мегапикселей не изменяется, а, следовательно, физический размер самого пикселя будет уменьшаться. Матрицы с 30 и более мегапикселями очень требовательны к качеству применяемой оптики, а также, как правило, они сильнее нагреваются и на изображении появляется цифровой шум, ухудшающий качество.
Теперь давайте разберемся с понятием кропа. Само это слово происходит от английского crop – «обрезать», и в среде фотографов служит для обозначения матриц (и камер с такими матрицами), размер которых меньше, чем размер полнокадровых матриц, которые по площади соответствуют пленочному кадру. Степень уменьшения кроп-матрицы выражается с помощью кроп-фактора. Например, матрица с кроп-фактором 1,5 в полтора раза меньше полнокадровой матрицы. Из вышесказанного можно сделать один важный вывод: если вы планируете покупку камеры с 20- и более мегапиксельной матрицей, то предпочтение лучше отдать полнокадровым камерам, т.к. физический размер пикселя на них будет больше. Но какую камеру выбрать, если речь идет о бытовом использовании? Увы, здесь нет однозначного ответа. Кропнутые камеры меньше и легче своих полнокадровых собратьев, да и стоят они иногда в разы дешевле, однако выбор оптики для них заметно уже, да и само ее качество ниже. Важно также понимать, что производители фототехники просто не станут создавать кропнутую камеру, которая технически близка к полнокадровой – в таком случае их маркетологи просто не смогут убедить людей платить большие деньги за полный кадр. Тем не менее, уровень развития технологий на сегодняшний день так высок, что возможности доступных кропнутых камер даже превышают запросы бытового использования, и в этом случае нет смысла переплачивать значительные деньги за профессиональную технику. Единственным исключением может являться ситуация, когда у вас уже есть хороший набор оптики от пленочного фотоаппарата.
Из вышесказанного можно сделать один важный вывод: если вы планируете покупку камеры с 20- и более мегапиксельной матрицей, то предпочтение лучше отдать полнокадровым камерам, т.к. физический размер пикселя на них будет больше. Но какую камеру выбрать, если речь идет о бытовом использовании? Увы, здесь нет однозначного ответа. Кропнутые камеры меньше и легче своих полнокадровых собратьев, да и стоят они иногда в разы дешевле, однако выбор оптики для них заметно уже, да и само ее качество ниже. Важно также понимать, что производители фототехники просто не станут создавать кропнутую камеру, которая технически близка к полнокадровой – в таком случае их маркетологи просто не смогут убедить людей платить большие деньги за полный кадр. Тем не менее, уровень развития технологий на сегодняшний день так высок, что возможности доступных кропнутых камер даже превышают запросы бытового использования, и в этом случае нет смысла переплачивать значительные деньги за профессиональную технику. Единственным исключением может являться ситуация, когда у вас уже есть хороший набор оптики от пленочного фотоаппарата. Тогда имеет смысл переплатить за полнокадровую камеру, чтобы иметь возможность использовать более высококачественные объективы.
Тогда имеет смысл переплатить за полнокадровую камеру, чтобы иметь возможность использовать более высококачественные объективы.
В завершении темы кропнутых и полнокадровых матриц хотелось бы внести ясность и в еще один вопрос. На просторах Интернета часто можно слышать мнение о том, что ГРИП (Глубина Резко Изображенного Пространства) отличается в зависимости от размера матрицы, а у полного кадра существует некий особый рисунок, присущий только этим камерам. Дело в том, что все эти утверждения не имеют ничего общего с техникой и здравым смыслом. ГРИП зависит только от трех параметров – от диафрагмы, фокусного расстояния и от расстояния до объекта съемки. Размер матрицы не оказывает на него никакого влияния. Качество изображения, также как и рисунок, зависят в основном от используемой оптики. Один и тот же объектив на обоих типах матриц даст одинаковое качество изображения. Важно только помнить, что при использовании полнокадрового объектива на кропнутой матрице в поле ее зрения будет попадать лишь часть формируемого объективом изображения. Многие ошибочно называют это увеличением, но это не так. Просто мы фиксируем лишь часть от полной картинки. Чтобы понять какую именно, нужно вновь обратиться к кроп-фактору. Например, если взять полнокадровый объектив с фокусным расстоянием 100 мм и сделать кадр на кроп-матрице с фактором 1,5, то изображение будет таким, как если бы на полнокадровую матрицу сняли кадр на фокусном 150 мм.
В последнее время рынок фототехники все уверенней завоевывают беззеркальные камеры. В чем их плюсы и минусы по сравнению с традиционными зеркалками? Основной плюс кроется в самой конструкции – в них отсутствует громоздкое зеркало и поднимающая его система, которые служат в зеркальных фотоаппаратах для передачи изображения из объектива в оптический видоискатель. За счет этого достигается меньший вес и размеры камеры. К плюсам таких камер относится и электронный видоискатель, который значительно облегчает настройку камеры (особенно для новичков) и использование мануальной оптики. Но есть и минусы – все тот же видоискатель является мощным потребителем электроэнергии и, естественно, приводит к более быстрой разрядке аккумуляторов, которые, к слову, в угоду уменьшения веса и размера и без того уступают аккумуляторам зеркалок. Еще одним минусом оптического видоискателя является его подтормаживание при съемке быстродвижущихся объектов. Поэтому, если вы хотите снимать репортажи, спорт или дикую природу, то, однозначно, ваш выбор это зеркальные камеры с оптическим видоискателем.
Но есть и минусы – все тот же видоискатель является мощным потребителем электроэнергии и, естественно, приводит к более быстрой разрядке аккумуляторов, которые, к слову, в угоду уменьшения веса и размера и без того уступают аккумуляторам зеркалок. Еще одним минусом оптического видоискателя является его подтормаживание при съемке быстродвижущихся объектов. Поэтому, если вы хотите снимать репортажи, спорт или дикую природу, то, однозначно, ваш выбор это зеркальные камеры с оптическим видоискателем.
Ознакомьтесь с обзором матриц, формирующих фотоизображение. Часть 1
Владимир Нескоромный
Главный редактор сайта alphapro.sony.ru
В потребительской технике всегда торжествует компромисс, о котором мы совершенно не задумываемся. Например, наше представление о передаче трехмерного пространства на плоской, двумерной фотографии, как правило, сводится к фокусному расстоянию объектива. Широкоугольник охватывает много объектов, телеобъектив — мало, кроме того, он уменьшает эффект пространственной перспективы. Но как, к примеру? 16-мм объектив, являясь широкоугольным для полнокадровой зеркалки, превращается в телевик для компактной камеры?
Но как, к примеру? 16-мм объектив, являясь широкоугольным для полнокадровой зеркалки, превращается в телевик для компактной камеры?
В поисках нормального объектива
Следует понимать, что характеристики объектива определяются не только (и не столько) его фокусным расстоянием, сколько размером светочувствительного элемента. В зависимости от эпохи, аналоговой или цифровой, это — кадр пленки или матрицы. Именно отношение фокусного расстояния объектива к диагонали кадрового окна и служит мерой нормальности объектива для фотоаппарата, с которым он используется. Если этот показатель значительно меньше единицы, объектив является широкоугольным, если больше — длиннофокусным, близок к единице — нормальный. Напомним, что для кадра 24х36 мм с диагональю 43,3 мм нормальными являются объективы с фокусным расстоянием f=40-60 мм; для среднего формата 6-см пленки граница нормальности f=70 мм; для полукадра 18х24 мм — f=30 мм.
Как формат определяет конечное качество изображения
Размер кадра пленки или матрицы определяет не только «перспективные» особенности получаемого изображения. В фотоиндустрии именно размер кадра, или формат, является компромиссным выбором, который необходим для выполнения различных требований.
В фотоиндустрии именно размер кадра, или формат, является компромиссным выбором, который необходим для выполнения различных требований.
Во-первых, размер кадра определяет габариты самой камеры — большая или компактная. Во-вторых, размер кадра важен для достижения необходимой светочувствительности и детализации изображения. В-третьих, он косвенно определяет возможность и степень управления глубиной резкости. Например, в художественной портретной фотографии мы обычно стремимся к уменьшению глубины резкости. В пейзажной и технической, наоборот, к ее увеличению. В зависимости от того, какому требованию разработчики отдают предпочтение, реализуется то или иное решение.
Фотограф может снимать на форматные пленки и сканирующие задники с размерами в десятки сантиметров, когда камера достигает метровых габаритов. А сотрудник спецслужбы — использовать для выполнения задания миниатюрную камеру-пуговицу в запонке. Но каждый их них получает необходимый результат и совершенно не переживает из-за своих габаритов фототехники.
Характеристики объектива определяются не только его фокусным расстоянием, сколько размером светочувствительного элемента. Именно отношение фокусного расстояния объектива к диагонали кадрового окна и служит мерой нормальности объектива для фотоаппарата, с которым он используется. Если этот показатель значительно меньше единицы, объектив является широкоугольным, если больше — длиннофокусным, близок к единице — нормальный.
О минусах миниатюризации
Удобство использования камеры определяется возможностью ее транспортирования и выполнения съемочных настроек с помощью кнопок, дисков, тачпэдов и сенсорного экрана. Аппарат с 10-сантиметровыми габаритами кажется наиболее эргономичным, и кадр форматом в несколько сантиметров как раз ему подходит. Но если понадобится сделать компактный телезум-объектив, чтобы носить камеру в кармане, то кадр придется уменьшить. Однако тут же возникает масса проблем. При значительном уменьшении размера кадра станет весьма затруднительно реализовать сложную механику управления, юстировку оптики, сохранить достаточную светочувствительность и разрешение. На практике с этим сталкиваются обладатели недорогих смартфонов. Стремление к миниатюризации приводит к повышенным шумам, завалам резкости и контраста по полю кадра из-за неточной юстировки оптики.
На практике с этим сталкиваются обладатели недорогих смартфонов. Стремление к миниатюризации приводит к повышенным шумам, завалам резкости и контраста по полю кадра из-за неточной юстировки оптики.
Эпоха полного кадра
Следующее требование — обеспечение требуемого разрешения и светочувствительности. Изображение элемента снимаемого объекта регистрируется ячейкой сенсора или светочувствительным кристаллом пленки. Чем они (ячейка и кристалл) больше, тем больше светового потока смогут захватить. Соответственно, вполне закономерное желание — использовать светочувствительные элементы покрупнее. Однако возникает другая задача — разрешение, количество пикселей или кристаллов.
Чтобы увеличить разрешение, нужно увеличить размеры матрицы или кадра пленки. С пленкой проще — просто перейти на больший формат, например, 6х9 см или 4х5 дюймов.
А вот увеличивать размеры матрицы слишком дорого. Только к настоящему времени доступная цельная матрица доросла до полного кадра 24х36 мм. А ведь в свое время компании-производители даже сращивали две недорогие маленькие матрицы в одну большую. Например, такое решение было реализовано в камере Minolta RD-3000, выпущенной в 1999 году. В ней две матрицы по 1,5 Мпикс. с помощью призмы формировали изображение с финальным разрешением 2,7 Мпикс.
А ведь в свое время компании-производители даже сращивали две недорогие маленькие матрицы в одну большую. Например, такое решение было реализовано в камере Minolta RD-3000, выпущенной в 1999 году. В ней две матрицы по 1,5 Мпикс. с помощью призмы формировали изображение с финальным разрешением 2,7 Мпикс.
Ограничения в гонке мегапикселей
Чтобы повысить разрешение, приходится уменьшать размер регистрирующего элемента сенсора при сохранении формата матрицы. К сожалению, и для пленки, и для матрицы существует физический предел уменьшения размера отдельного элемента. А значит, что и у разрешения тоже есть свой предел. Речь идет о дифракционном рассеянии света, обусловленное ограниченностью размера объектива. Оно накладывает ограничение на минимальный шаг между светочувствительными элементами матрицы.
Например, чтобы раскрыть потенциал по разрешению объектива с диафрагмой f/2, достаточно использовать матрицу с минимальной дистанцией между светочувствительными элементами около одного микрона.
Использовать матрицу с шагом меньше 3 микрон с оптикой со светосилой f/5.6 не имеет смысла, поскольку пятно дифракционного рассеяния растет пропорционально диафрагменному числу.
В случае с пленочной фотографией ограничением на разрешение является структура фотоэмульсии. Хотя размер светочувствительного кристалла современных пленок и близок к одному микрону, но их распределение в слое эмульсии толщиной в несколько микрометров ограничивает разрешающую способность обычной фотопленки примерно 10 микронами (100 линий/мм).
Маленькие шаги на пути к гигантскому разрешению
А что происходит в цифровой фотографии, где матрица с шагом в один микрон уже стала реальностью? Попробуем оценить желаемую мегапиксельность полнокадровой матрицы 24х36 мм с шагом ячеек в один микрон применительно к объективу со светосилой f/2.
Тысяча элементов на миллиметр в пересчете на общее разрешение матрицы составят 24000х36000 или почти 900 Мпикс.! К сожалению, современная электроника не способна поддерживать такую матрицу, а именно, эффективно считывать и сохранять получаемый гигантский объем информации. Про массовый выпуск таких матриц мы даже не говорим.
Про массовый выпуск таких матриц мы даже не говорим.
В настоящее время в системных камерах Sony устанавливают полнокадровые матрицы с разрешением 42,4 Мпикс. и шагом 4,5 микрона (ILCE-7RM2). Имеет ли смысл дальнейшее повышение разрешения? С точки зрения потребителя, несомненно. Однако с инженерных позиций, при современном уровне развития технологий вряд ли будет оправданным стремление к повышению разрешения до дифракционного предела. Неидеальность оптики (аберрации и ошибки юстировки, фокусировки) устанавливает свои, более грубые, чем дифракционный предел, ограничения на увеличение разрешения.
В тоже время компания Sony наращивает линейку объективов серии G Master, которые способны поддерживать матрицы с разрешением в 100 Мпикс. Неужели нас ждет очередная сенсация?
Ну, а маленькие матрицы с шагом, близким к одному микрону, успешно используются в цифровых компактах и смартфонах.
Полнокадровая матрица в камере Sony A7R II. Разрешение 42,4 Мпикс.
О плюсах и минусах глубины резкости
Наконец, третья характеристика фотоизображения — глубина резкости. Для начала вспомним, что такое гиперфокальное расстояние. Мы видим резкими объекты не точно на дистанции наводки на резкость, а в некотором диапазоне около нее. И можно выбрать дистанцию наводки объектива так, что при установленной диафрагме все объекты от точки наводки на резкость и до бесконечности будут казаться резкими. Эта дистанция и есть гиперфокальное расстояние. Как правило, оно пропорционально квадрату фокусного расстояния и обратно пропорционально диафрагменному числу.
Для начала вспомним, что такое гиперфокальное расстояние. Мы видим резкими объекты не точно на дистанции наводки на резкость, а в некотором диапазоне около нее. И можно выбрать дистанцию наводки объектива так, что при установленной диафрагме все объекты от точки наводки на резкость и до бесконечности будут казаться резкими. Эта дистанция и есть гиперфокальное расстояние. Как правило, оно пропорционально квадрату фокусного расстояния и обратно пропорционально диафрагменному числу.
Если сравнивать результат, получаемый двумя камерами — с маленькой и большой матрицей, то окажется, что при равных условиях (угол охвата пространства и размер конечной картинки) гиперфокальное расстояние для камеры с меньшим фокусным расстоянием и небольшой матрицей будет меньше. Иными словами, при той же диафрагме на снимке компактной камеры зона резкости будет находиться ближе и будет шире, чем у камеры с большой матрицей. Это означает, что диафрагма f/2 компакта, на самом деле, вовсе не дает портретного эффекта с малой глубиной резкости, а работает как f/8-11 зеркалки или беззеркалки.
Для портретов это, может быть, и не очень здорово, а для предметной и макросъемки, наоборот, просто замечательно. Ведь за увеличение глубины резкости не нужно платить диафрагмированием объектива, длинной выдержкой, повышением светочувствительности и, в конце концов, чистотой картинки (шумами) и резкостью.
Заключение
На фоторынке сейчас можно встретить самые различные предложения. Однако чтобы хорошо ориентироваться в них, следует знать основные параметры фототехники и понимать важность каждого их низ применительно к своим задачам. Собственно, мы их изучили. Теперь можно переходить к выбору конкретной камеры, и этой теме посвящен следующий материал.
Продолжение материала (часть 2) читать здесь.
таблица. Физический размер матрицы фотоаппарата
Практически каждый современный человек сталкивался с непростой ситуацией по выбору цифрового фотоаппарата. Как его выбрать, чтобы получить качественные снимки? От чего зависит физическое качество снимка? Попытаемся, не углубляясь в тонкости, ответить на эти вопросы.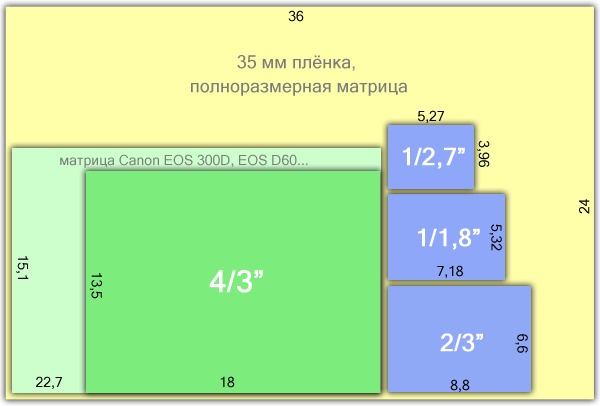 Художественную ценность фотографии в данной статье рассматривать не будем.
Художественную ценность фотографии в данной статье рассматривать не будем.
Определяющие характеристики цифровой камеры – это количество мегапикселов и размер матрицы фотоаппарата
Что такое пиксел и матрицы? Матрица (синоним – сенсор) – это прямоугольный плоский элемент, заменивший фотоплёнку в старой фотокамере и преобразующий в электрические сигналы изображение, которое попало в неё через объектив. Эту информацию процессор аппарата после оцифровки записывает на карту памяти в виде файла. На матрице расположены пикселы — базовые элементы или точки (микроскопические фотоэлементы-транзисторы), из которых формируется цифровое изображение. Мегапиксел – миллион пикселов. Большинство покупателей ориентируются именно на этот параметр. Производителю цифрового аппарата намного дешевле установить в своё устройство новую матрицу с увеличенным количеством мегапикселов и запустить его в производство, нежели переработать практически всё устройство камеры и обеспечить его большой матрицей. Поэтому в магазине продавец заостряет внимание покупателя именно на параметре, отражающем число мегапикселов, и скромно замалчивает размер матрицы фотоаппарата.
Поэтому в магазине продавец заостряет внимание покупателя именно на параметре, отражающем число мегапикселов, и скромно замалчивает размер матрицы фотоаппарата.
Какие размеры матриц в фотоаппаратах различной стоимости?
Чем больше размеры пиксела и (как следствие) матрицы, тем качественнее снимок. Большой размер пиксела лучше воспринимает свет и точнее определяет цвет. Чем меньше размеры пиксела и матрицы, тем больше помех (шумов) на снимке. Поэтому много мегапикселов вовсе не означает, что качество снимка будет отличное. Размер матрицы – вот определяющий качество снимка и стоимость аппарата параметр. На нижеследующем снимке видна матрица зеркальной камеры. Очистка её производится с помощью специальной программы, которая установлена в фотоаппарате. Прикасаться к матрице руками и любыми предметами абсолютно недопустимо. Это прямой путь к выходу её из строя.
Какие размеры матриц фотоаппаратов бывают, в каких камерах они установлены?
Ответ на этот вопрос ниже.
Размеры матриц фотоаппаратов: таблица
Формат или дюймы диагонали | Физический размер, мм | Пример устройства |
| FF (FullFrame), полный кадр | 36 × 24 | Дорогие профессиональные фотокамеры. Canon, Nikon, Sony, Leica |
| APS-C | 23,5 × 15,6 | Зеркалки широкого ценового диапазона Nikon, Canon, Sony |
| APS-C | 22,3 × 14,9 | Зеркалки широкого ценового диапазона Canon, Sony, продвинутые беззеркалки |
| 4/3″ или Micro 4/3 | 17,3 × 13,0 | Беззеркалки широкого ценового диапазона Panasonic, Olympus |
| 1″ | 12,8 × 9,6 | Беззеркалки Nikon, Samsung и продвинутые компактные фотоаппараты |
| 1/2,3″ | 6,16 × 4,62 | Подавляющее большинство мыльниц |
| 1/3″ | 4,69 × 3,52 | Фотокамеры смартфонов |
Рекомендации по выбору фотокамеры
Если вы выбираете из нескольких устройств фотоаппарат по количеству мегапикселов, то окончательный вывод разумно делать после того, как выясните, матрицы какого размера в них установлены..jpg) Выбор стоит сделать в пользу той фотокамеры, в которой установлена матрица самого большого размера.
Выбор стоит сделать в пользу той фотокамеры, в которой установлена матрица самого большого размера.
Если вы хотите снимать на камеру с большой матрицей, придётся мириться с её большими размерами и весом. Проанализировав рынок фотоаппаратов, становится понятно, что не существует пока небольших и дешёвых полнокадровых камер. А массовая мобильная фототехника сильно ограничена небольшим размером матрицы.
Если вы не предполагаете заниматься фотографией профессионально, то и не стоит тратиться на дорогой фотоаппарат с большим сенсором. Обычные цифровые дешёвые фотоаппараты (современные мыльницы) справятся с этой задачей ненамного хуже навороченных зеркалок и порадуют вас приличными снимками.
Не стоит забывать, что камеры в современных смартфонах также имеют неплохие параметры, которых вполне достаточно для оперативного создания хорошего снимка.
В заключение заметим, что на получение качественного снимка влияет много факторов. Самый важный из них – профессионализм фотографа. И расхожее мнение о том, что крутая камера – залог прекрасных снимков, так же далеко от истины, как и то, что дорогая кисть у художника – гарантия создания шедевров. Фотоаппаратура – всего лишь инструмент. Фотографирует человек, а не камера. Тем не менее в арсеналах у знаменитых фотохудожников трудно найти дешёвую мыльницу. Выбор за вами.
И расхожее мнение о том, что крутая камера – залог прекрасных снимков, так же далеко от истины, как и то, что дорогая кисть у художника – гарантия создания шедевров. Фотоаппаратура – всего лишь инструмент. Фотографирует человек, а не камера. Тем не менее в арсеналах у знаменитых фотохудожников трудно найти дешёвую мыльницу. Выбор за вами.
Размер матрицы — обзор
Мы используем одну (или в нижнем индексе) жирную заглавную букву для обозначения матрицы (например, A , B , C 1 , C 2 ) в отличие от строчных полужирных букв, используемых для обозначения векторов. Заглавные буквы I и O обычно зарезервированы для специальных типов матриц, обсуждаемых позже.
Размер матрицы всегда указывается первым числом строк.Например, матрица 3 × 4 всегда имеет три строки и четыре столбца, а не четыре строки и три столбца.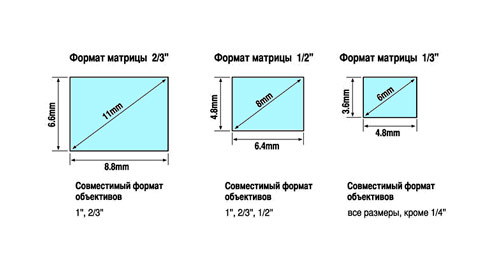
Матрица m × n может рассматриваться как набор векторов-строк m , каждый из которых имеет координаты n , или как набор векторов-столбцов n , каждый имеющий координаты м . Матрица с одной строкой (или столбцом) по существу эквивалентна вектору с координатами в виде строки (или столбца).
Мы часто пишем a ij для представления записи в строке i и j -м столбце матрицы A . Например, в предыдущей матрице , , , , , 23, — это запись -5 во второй строке и третьем столбце. Типичная матрица 3 × 4 C имеет элементы, обозначенные как
C = [c11c12c13c14c21c22c23c24c31c32c33c34].
ℳ mn представляет собой набор всех матриц с записями действительных чисел, имеющими m строк и n столбцов. Например, ℳ 34 — это набор всех матриц, имеющих три строки и четыре столбца. Типичная матрица в ℳ 34 имеет форму предшествующей матрицы C .
Например, ℳ 34 — это набор всех матриц, имеющих три строки и четыре столбца. Типичная матрица в ℳ 34 имеет форму предшествующей матрицы C .
главная диагональ элементов матрицы A — это a 11 , a 22 , a 33 ,…, те, которые лежат на диагональной линии рисуются вправо, начиная с верхнего левого угла матрицы.
(PDF) Влияние размера матрицы на качество изображения КТ сверхвысокого разрешения легкого
качества(P <0,001), прозрачность мелких сосудов (P = 0,014), твердые узелки
( P = 0,002), непрозрачность матового стекла (P = 0,008), эмфизема
(P = 0,008; рис. 4), внутрилобулярная ретикуляция (P = 0,014) и расчесывание глаз Hon-
(P = 0,002 ; Рис 5). Результаты матрицы 2048 × 2048,
и 1024 × 1024 были значительно лучше, чем оценка
матрицы 512 × 512 (P <. 01), за исключением шума и полосы
01), за исключением шума и полосы
артефакта. Матрица 512 × 512 имела меньший визуальный шум, чем матрица
1024 × 1024 (P <0,001), а матрица 1024 × 1024
имела меньший визуальный шум, чем матрица 2048 × 2048 (P <0,001;
Рис. 4 и 5). За исключением шума, не было элемента, для которого матрица
512 × 512 или 1024 × 1024 работала лучше
, чем матрица 2048 × 2048. Что касается артефактов полос,
баллов для трех размеров матриц были почти равны и не сильно различались.
Анализ объективного изображения
Значения SD составили 6,32 ± 0,43 HU для матрицы 512 × 512,
22,42 ± 1,95 HU для матрицы 1024 × 1024 и
33,72 ± 3,38 HU для матрицы 2048 × 2048. Матрица 512 × 512
имела меньший объективный шум, чем матрица 1024 × 1024
(P <0,001), а матрица 1024 × 1024 имела меньший объективный шум
, чем матрица 2048 × 2048 (P <0,001).
ОБСУЖДЕНИЕ
Сообщалось о некоторых исследованиях качества изображения U-HRCT с использованием размера матрицы
1024 × 1024 (7), но насколько нам известно
, данное исследование было первым для оценки
оценить качество матрицы 2048 × 2048, полученной с помощью
U-HRCT.
В этом исследовании максимальное пространственное разрешение U-HRCT
составляло 0,14 мм, что было меньше, чем разрешение до
, о котором сообщалось для традиционной КТ (3,4). При оценке фантома щели FOV размером 320 мм
размер матрицы
2048 × 2048 поддерживал пространственное разрешение, тогда как размеры матрицы 512 × 512,
,и 1024 × 1024 ухудшали пространственное разрешение. При субъективном анализе размеры матрицы 2048 × 2048 и
1024 × 1024 показали лучшие результаты, чем изображение 512 × 512
, за исключением шума и артефактов в виде полос.Более того, изображение
2048 × 2048 работало лучше, чем изображение 1024 × 1024
с точки зрения общего качества изображения, четкости мелких сосудов
и некоторых других результатов. С другой стороны, в
как субъективном, так и объективном анализах шум был значительно меньше —
— значительно меньше, порядка 512 × 512, 1024 × 1024 и
2048 × 2048 изображений.
Максимальное пространственное разрешение КТ-сканера зависит от таких факторов, как размер фокуса рентгеновской трубки, размер
элементов детектора и геометрическое расположение компонентов, чтобы назовите несколько.Размер матрицы влияет на пространственное разрешение
восстановленного изображения, но изменение размера матрицы
не сделало пространственное разрешение восстановленного изображения
лучше, чем максимальное пространственное разрешение сканера CT
. Когда размер 1 пикселя превышает максимальное пространственное разрешение
, пространственное разрешение восстановленного изображения
зависит от размера матрицы. Размеры 1 пикселя в матрицах
, 512 × 512, 1024 × 1024 и 2048 × 2048 с FOV реконструкции 320–
мм равны 0.625 мм, 0,313 мм и
0,156 мм соответственно; они были больше, чем максимальное пространственное разрешение 0,14-
мм сканера U-HRCT.
Следовательно, на пространственное разрешение влияет размер матрицы
в восстановленном 320-миллиметровом изображении поля зрения
U-HRCT.
При оценке трупного легкого с полем обзора 320 мм было обнаружено
значительных различий между изображениями 2048 × 2048 и
1024 × 1024 с точки зрения общего качества изображения, четкости
мелких сосудов, твердых узелков, матового стекла. помутнение, эмфизема, внутрилобулярная ретикуляция
и соты.Поскольку 11
ТАБЛИЦА 2. Сравнение оценок субъективного анализа между размерами матриц
N
Оценка (среднее ± стандартное отклонение) PValue
2048 1024 512 2048 vs 1024 2048 vs 512 1024 vs 512
Общее качество изображения 33 2,8 ± 0,4 2,0 ± 0,0 1,0 ± 0,0 <0,001 * <. 001 * <. 001 *
Шум 33 1,0 ± 0,0 2,0 ± 0,0 3,0 ± 0,0 <0,001 * <. 001 * <. 001 *
Артефакт полосы 33 2,0 ± 0,2 2,0 ± 0,2 2,0 ± 0,2 1 1 1
Ясность малого сосуда 29 2,2 ± 0.4 2,0 ± 0,0 1,0 ± 0,0 .014 * <. 001 * <. 001 *
Ясность мелких бронхов 29 2,1 ± 0,4 2,0 ± 0,0 1,0 ± 0,0 0,046 <0,001 * <. 001 *
Твердый узелок 26 2,4 ± 0,5 2,0 ± 0,0 1,0 ± 0,0 . 002 * <. 001 * <. 001 *
002 * <. 001 * <. 001 *
Слабый узелок 11 2,4 ± 0,5 2,0 ± 0,0 1,0 ± 0,0 0,046 0,002 * .001 *
Непрозрачность матового стекла 25 2,3 ± 0,5 2,0 ± 0,0 1,0 ± 0,0 0,008 * 0,002 * 0,001 *
Консолидация 11 2,2 ± 0,4 2,0 ± 0,0 1,0 ± 0,0 .157 0,002 * 0,001 *
Эмфизема 12 2,6 ± 0,5 2,0 ± 0,0 1,0 ± 0,0 .008 * .002 *.001 *
Утолщение межлобулярной перегородки 15 2,3 ± 0,5 1,9 ± 0,3 1,1 ± 0,2 0,059 0,001 * <0,001 *
Утолщение бронхо-сосудистого пучка 12 2,0 ± 0,0 2,0 ± 0,0 1,0 ± 0,0 1 0,001 * 0,001 *
Внутридольковая ретикуляция 12 2,5 ± 0,5 2,0 ± 0,0 1,0 ± 0,0 .014 * .002 * .001 *
Бронхоэктатическая болезнь 9 2,0 ± 0,0 1,9 ± 0,3 1,0 ± 0,0 .317 0,003 * 0,005 *
Соты 11 2,9 ± 0,3 2,0 ± 0,0 1,0 ± 0,0 .002 * .001 * .001 *
КТ, компьютерная томография; N — количество оцениваемых участков для каждого вывода КТ; SD, стандартное отклонение.
* Значительно отличается в знаковом ранговом тесте Вилкоксона с поправкой Бонферрони, примененной для множественных сравнений.
Academic Radiology, Vol 25, No 7, July 2018 ВЛИЯНИЕ РАЗМЕРА МАТРИЦЫ НА ЛЕГКОЕ U-HRCT
873
c — Умножение матрицы: небольшая разница в размере матрицы, большая разница во времени
Вы определенно получаете то, что я называю кэшем , резонансным . Это похоже на псевдоним , но не совсем то же самое. Позволь мне объяснить.
Кеши — это аппаратные структуры данных, которые извлекают одну часть адреса и используют ее в качестве индекса в таблице, в отличие от массива в программном обеспечении. (Фактически, мы аппаратно называем их массивами.) Массив кеша содержит строки кэша данных и теги — иногда одна такая запись на каждый индекс в массиве (прямое отображение), иногда несколько таких (N-сторонняя ассоциативность набора). Вторая часть адреса извлекается и сравнивается с тегом, хранящимся в массиве. Вместе индекс и тег однозначно идентифицируют адрес памяти строки кэша.Наконец, остальные биты адреса определяют, какие байты в строке кэша адресованы, а также размер доступа.
Обычно индекс и тег представляют собой простые битовые поля. Таким образом, адрес памяти выглядит как
... Тег ... | ... Указатель ... | Offset_within_Cache_Line
(Иногда индекс и тег являются хешами, например, несколько XOR других битов в биты среднего диапазона, которые являются индексом. Гораздо реже, иногда индекс и реже тег — это такие вещи, как взятие адреса строки кэша по модулю простое число.Эти более сложные вычисления индекса — это попытки решить проблему резонанса, которую я объясняю здесь. Все страдают той или иной формой резонанса, но, как вы обнаружили, простейшие схемы извлечения битового поля страдают резонансом с общими шаблонами доступа.)
Итак, типичные значения … есть много разных моделей «Opteron Dual Core», и я не вижу здесь ничего, что указывало бы на то, какая из них у вас есть. Выбирая одно наугад, последнее руководство, которое я вижу на веб-сайте AMD, Bios and Kernel Developer’s Guide (BKDG) для AMD Family 15h Models 00h-0Fh, 12 марта 2012 г.
(Семейство 15h = семейство Bulldozer, новейшие высокопроизводительные процессоры — в BKDG упоминается двухъядерный процессор, хотя я не знаю номер продукта, который вы точно описываете. Но, в любом случае, одна и та же идея резонанса применима ко всем процессорам , просто такие параметры, как размер кеша и ассоциативность, могут немного отличаться.)
Со стр.33:
Процессор AMD семейства 15h содержит 16-килобайтный 4-сторонний прогнозируемый L1 кэш данных с двумя 128-битными портами. Это кэш со сквозной записью, который поддерживает до двух 128-байтовых нагрузок за цикл.8 = 256 строк кэша в кеше.
(Исправление: изначально я неправильно рассчитал это как 128. что я исправил все зависимости.)4-сторонняя ассоциативная => 256/4 = 64 индекса в массиве кеша. Я (Intel) называю эти «наборы».
, то есть вы можете рассматривать кеш как массив из 32 записей или наборов, каждая запись содержит 4 строки кеша и их теги.
(Это сложнее, но это нормально).
(Кстати, термины «набор» и «путь» имеют разные определения.)
есть 6 бит индекса, биты 6-11 в простейшей схеме.
Это означает, что любые строки кэша, которые имеют точно такие же значения в битах индекса, биты 6-11, будут отображаться в один и тот же набор кеша.
Теперь посмотрим на свою программу.
C [размер * i + j] + = A [размер * i + k] * B [размер * k + j];Цикл k — это самый внутренний цикл. Базовый тип — двойной, 8 байт. Если размерность = 2048, то есть 2К, то последовательные элементы
B [размер * k + j], к которым обращается цикл, будут разделены на 2048 * 8 = 16 Кбайт.Все они будут отображаться в один и тот же набор кеша L1 — все они будут иметь один и тот же индекс в кеше. Это означает, что вместо 256 строк кэша, доступных для использования, будет только 4 — «четырехсторонняя ассоциативность» кеша.Т.е. вы, вероятно, будете получать пропуски кеша каждые 4 итерации этого цикла.
Нехорошо.
(На самом деле, все немного сложнее. Но вышесказанное является хорошим первым пониманием. Адреса записей B, упомянутых выше, являются виртуальными адресами.Так что физические адреса могут немного отличаться. Более того, Bulldozer имеет способ кеширования с предсказанием, вероятно, использующий биты виртуальных адресов, чтобы не ждать преобразования виртуального адреса в физический. Но, в любом случае: ваш код имеет «резонанс» 16К. Кэш данных L1 имеет резонанс 16К. Не хорошо.)]
Если вы немного измените размер, например до 2048 + 1, то адреса массива B будут распределены по всем наборам кеша. И вы получите значительно меньше промахов в кеш-памяти.
Это довольно распространенная оптимизация для заполнения ваших массивов, например изменить 2048 на 2049, чтобы избежать этого резонанса. Но «блокировка кеша — еще более важная оптимизация. Http://suif.stanford.edu/papers/lam-asplos91.pdf
Помимо резонанса строки кэша, здесь происходят и другие вещи.
Например, кэш L1 имеет 16 банков, каждый по 16 байт. При размере = 2048 последовательные обращения к B во внутреннем цикле всегда будут происходить в одном и том же банке. Таким образом, они не могут работать параллельно — и если доступ A попадет в тот же банк, вы проиграете.
Глядя на это, не думаю, что это так же велико, как резонанс кеша.
И, да, возможно, есть алиасинг. Например. Буферы STLF (Store To Load Forwarding) могут сравнивать только с использованием небольшого битового поля и получать ложные совпадения.
(На самом деле, если подумать, резонанс в кэше похож на наложение, связанный с использованием битовых полей. Резонанс возникает из-за того, что несколько строк кэша сопоставляют один и тот же набор, а не распространяются по всему миру. адресные биты.)
В целом моя рекомендация по тюнингу:
Попробуйте заблокировать кеш без дальнейшего анализа. Я говорю это, потому что блокировать кеш легко, и очень вероятно, что это все, что вам нужно сделать.
После этого используйте VTune или OProf. Или Cachegrind. Или …
А еще лучше использовать хорошо настроенную библиотечную подпрограмму для матричного умножения.
haskell — Могут ли хорошие системы типов различать матрицы в разных базах?
Это очень хороший вопрос.Я не думаю, что вы можете закодировать понятие основы в большинстве систем типов, потому что, по сути, все, что делает средство проверки типов, должно иметь возможность завершать работу, и выносить суждения о том, равны ли два действительных вектора, слишком сложно. Например, у вас может быть (2 v_1) + (2 v_2) или 2 (v_1 + v_2). Есть некоторые языки, которые используют зависимых типов [википедия], но они относительно академичны.
Я думаю, что большая часть вашей боли при отладке будет облегчена, если вы просто закодируете основы, в которых ваша матрица работает вместе с матрицей.Например,
newtype Matrix = Matrix {transform :: [[Double]], srcbasis :: [Двойной], dstbasis :: [Двойной]}, а затем, когда вы M из базиса a от до b с N , проверьте, что N находится в диапазоне от b до c , и верните матрицу с базисом a от до c .
ПРИМЕЧАНИЕ — похоже, что у большинства здесь есть программирование, а не математика, поэтому я дам здесь краткое объяснение.2 (двумерные вещественные числа), то стандартный способ кодирования этого в матрице гласит, что стандартный базовый вектор e_1 , записанный «[1, 0]», отправляется в комбинацию e_1 и e_2, а именно [ 1 / sqrt (2), 1 / sqrt (2)]. Дело в том, что вы можете закодировать одно и то же вращение, указав, куда идут разные векторы, например, вы можете указать, куда вы отправляете [1,1] и [1, -1] вместо e_1 = [1,0] и e_2 = [0,1], и это будет иметь другое матричное представление.
Редактировать 1
Если у вас есть конечный набор баз, с которыми вы работаете, вы можете это сделать…
{- # LANGUAGE EmptyDataDecls # -} данные BasisA данные BasisB данные BasisC newtype Matrix a b = Matrix {коэффициенты :: [[Double]]} multiply :: Matrix a b -> Matrix b c -> Matrix a c multiply (Matrix a_coeff) (Matrix b_coeff) = (Matrix multiplied) :: Matrix a c где multiplied = undefined - здесь ваш алгоритмЗатем в ghci (интерактивном интерпретаторе Haskell)
* Матрица> let m = Матрица [[1, 2], [3, 4]] :: Матрица BasisA BasisB * Матрица> m `умножить` m <интерактивный>: 1:13: Не удалось сопоставить ожидаемый тип BasisB против предполагаемого типа `BasisA ' * Матрица> let m2 = Матрица [[1, 2], [3, 4]] :: Матрица BasisB BasisC * Матрица> m `умножить` m2 - работает после того, как вы закончите определение шоу и алгоритм умножениявложений: матрица смысла.
Автор: Адам Шваб | by Petuum, Inc.
Адам Шваб
Как мы можем смоделировать , означающее слова? Когда мы думаем о глаголе «бегать», он вызывает чувство напряжения или, возможно, изображение марафона. Можем ли мы представить слово как узел на графике или смоделировать его как изображение? На протяжении веков вопрос о том, как моделировать значение, оставался философам, а в последние сто лет — психологам и лингвистам. За последние двадцать лет этот вопрос стал критически важным для мира искусственного интеллекта и информатики.
В этом контексте мы можем эмпирически исследовать значения слов. Концепция матрицы внедрения оказалась полезной как для понимания лингвистики, так и для решения реальных проблем в области обработки естественного языка.
Возьмите три похожие фразы:
- … когда рабочий ушел…
- … когда ушел рыбак…
- … когда собака ушла…
А теперь представьте, что мы не знаем, что Значит « рабочий », « рыбак», и « собака» .
На самом деле мы не знаем ни одного слова, но легко можем сказать, что фразы идентичны, за исключением одного слова. Поскольку контексты идентичны, мы можем экстраполировать, что существует некоторое сходство между « рабочий», «рыбак», и « собака» . Применяя эту идею ко всему корпусу, мы могли определить отношения между словами. Затем мы подходим к вопросу о том, как лучше всего представить эти отношения в общем виде.
Концепция матрицы вложения — это попытка решить эту проблему представления отношений.Для начала мы выбираем размерность значения — это может быть несколько произвольно. Скажем, мы решили, что все значения могут отображаться в некотором абстрактном трехмерном пространстве. Концептуально это будет означать, что все слова будут существовать как особые точки в трехмерном пространстве, и любое слово может быть однозначно определено своим положением в этом пространстве, описываемым тремя числами (x, y, z). Но на самом деле значение слишком сложно, чтобы уместиться в трех измерениях.
Обычно мы используем что-то вроде 300 измерений, и все слова соответствуют какой-то точке в этом 300D гиперпространстве и определяются 300 числами.Мы называем 300 чисел, которые идентифицируют данное слово, с вложением для этого слова.
Теперь отношения между словами можно представить, сравнивая вложения слов. Например, «рабочий» сопоставляется с W , который является вектором длиной 300, а «рыбак» сопоставляется с F , который представляет собой другой вектор длиной 300. Связь между двумя словами можно описать как их различие: W – F . Обратите внимание, что это не коммутативно (x – y! = Y – x), но отношения слов друг к другу также не коммутативны.Отношения между « человека» и « человека» не такие, как наоборот. Направление отношений на самом деле содержит в себе смысл — что можно сделать с « человека», , чтобы превратить его в « человека»?
Матрица вложения — это список всех слов и соответствующих им вложений.
Следует помнить о нескольких вещах:
- Думать в высших измерениях сложно. Не увлекайтесь размерами.Та же концепция работает (хотя и не так хорошо) в трех измерениях.
- В реальном мире каждое измерение имеет очевидный физический смысл — как оси XYZ нашего трехмерного мира. В пространстве вложения мы обычно не определяем оси — большую часть времени мы даже не знаем, что представляет собой конкретная ось в нашем гиперпространстве вложения. Вместо этого мы используем другие инструменты для расшифровки полезности из матрицы.
- Обратите внимание, что в приведенной выше матрице внедрения каждая строка соответствует слову, а каждый столбец соответствует измерению (оси).Обычно мы храним это в плотном формате, где у нас есть список слов и идентификаторов строк, которые сопоставляются с соответствующей строкой матрицы. В приведенном выше примере у нас был бы следующий список в дополнение к матрице:
{привет: 0, там: 1, техас: 2, мир: 3,…}
- Мы, очевидно, не можем имеют бесконечные строки в этой матрице, поэтому они обычно обрезаются, скажем, на 50 000 — это должны быть 50 000 наиболее распространенных слов.
Если мы когда-либо видим слово только в одном контексте, трудно определить его значение (например,g., трудно выучить некоторые слова, которые у нас нет причин часто употреблять). Любое слово в наборе данных, которого нет в нашем списке, получает тег «UNK», что означает, что мы не увидим его достаточно раз, чтобы быть полезным. UNK-слова настолько редки, что мы обычно можем их игнорировать.
- Матрицы вложения очень большие! Если у нас есть 50 000 слов и 300 измерений, это означает, что у нас есть 50 000 x 300 отдельных чисел. Если эти числа являются числами с плавающей запятой (4 байта), нам потребуется 50 000 x 300 x 4 байта — 60 МБ для одной матрицы!
Если бы мы могли сгенерировать эти 50 000 x 300 чисел, то теоретически у нас был бы «словарь» всех 50 000 слов, закодированных в числах.Это было бы очень полезно для разработки моделей машинного обучения, поскольку им больше не приходилось иметь дело с беспорядочными строками.
Как и для любой другой обучающей задачи, вам нужен какой-то набор данных для обучения внедрению.
Сложность заключается в том, что, в отличие от большинства функций затрат на глубокое обучение, у нас нет «реальных» вложений для расчета полезной потери (ошибки). Таким образом, у нас нет лучшего выхода, чем тренироваться для какой-то другой цели, которую мы можем протестировать и, надеюсь, создать вложения в качестве побочных продуктов — параметров — на этом пути.
Одна из методологий заключается в разработке модели, позволяющей угадывать контекст слова из самого слова. Это полезно, потому что позволяет нам всегда проверять, правильно ли угадала модель, в то время как проверить правильность внедрения невозможно.
Матрица внедрения инициализируется случайным образом и задается в качестве параметров этой модели определения контекста. Стоимость можно рассчитать, посмотрев, насколько точно модель угадала встраивание контекста, после чего всю модель можно обучить с помощью градиентного спуска.Это модель «непрерывного набора слов», предложенная Миколовым и др. В 2013 году.
После обучения матрицы внедрения на основе набора данных было бы неплохо изучить вложения, чтобы увидеть, имеют ли они смысл.
На самом деле нет никаких гарантий, потому что в процессе обучения может пойти не так много вещей:
- Набор данных может быть недостаточно общим (возможно, вложения нескольких слов хороши, но не все 50 000).
- Возможно, набора данных недостаточно для обучения встраиваний.В этом случае любой метод обучения запомнит набор данных, создав вложения мусора.
- Мы могли выбрать неправильную размерность для наших вложений.
- Возможно, у выбранной нами модели обучения есть недостаток, заключающийся в том, что она не сходится должным образом.
- Один из наших гиперпараметров (параметры, которые являются частью модели, но не обучены моделью, которую мы задали перед процессом обучения) может привести к тому, что он не сойдется должным образом.
Таким образом, определенно необходимо оценить модель, но оценить вложения не так просто, как оценить другие задачи машинного обучения, потому что модель изучает вложения только как побочный продукт угадывания какой-то другой задачи ( например, значение слова в зависимости от контекста).
Мы могли бы проверить, насколько хорошо модель угадывает контекстные слова, но само по себе это не так уж и полезно.
Можно использовать несколько других методов:
- Для встраивания данного слова мы можем проверить слова , ближайшие к этому слову. Если мы думаем о словах как о точках в пространстве, то для любых двух слов существует расстояние между ними. Если наша матрица внедрения была успешно обучена, синонимы должны появиться ближе друг к другу.
- Соотношения слов:
« King» означает « Queen» как « Man» означает X
Когда у нас есть вложения, мы можем преобразовать указанное выше отношение в уравнение:
King – Queen ~ Man – X
- В семантическом наборе данных, который имеет много подобных отношений, если вложения обучены правильно, X выше должно быть тем, что мы ожидаем: « Woman .”
- Наконец, существуют другие модели машинного обучения, которые предназначены для использования встраиваемых слов в качестве входных данных.
Если наши вложения кажутся правильными, мы могли бы использовать их в качестве входных данных для другой модели, которая тренирует что-то еще, например, анализ настроений.
Возможность правильного обучения матриц внедрения является необходимым условием для большинства моделей машинного обучения НЛП, но работа с матрицами внедрения вызывает некоторые инженерные проблемы. Матрицы довольно большие, и они не следуют тем же предположениям, для которых были разработаны тензорные структуры.В моделях обработки изображений параметры обычно являются плотными (вся матрица обучается и обновляется на каждом шаге), однако при обучении с встраиваемыми матрицами мы обычно обучаем только строки (слова), относящиеся к текущему контекстному окну в наборе обучающих данных. Подавляющее большинство матрицы не изменяется на данном этапе обучения.
В случае с одним узлом, поскольку нам все еще нужно хранить всю матрицу, это не имеет большого значения, но при распространении модели обучения это имеет серьезные последствия.
Как правило, при глубоком обучении мы распределяем модели по кластеру, используя параллелизм данных — метод, при котором каждый рабочий узел в кластере работает с одной и той же моделью, но с разными данными. Затем они координируют обновления, которые будут вносить в параметры — минимальную информацию, необходимую для совместной работы. При работе с плотными параметрами такая координация просто означает, что каждый воркер копирует свои параметры друг другу. Однако разреженные матрицы, такие как матрица внедрения, можно сделать намного более эффективными, если они передают только измененные строки.Большинство параметров копировать не нужно.
Итак, как мы можем эффективно передавать определенные строки матрицы по сети? Следующие практические правила основаны на нашем исследовании:
- При копировании данных всегда эффективнее делать это массово, а не по одному. Например, если у нас есть 100 строк для передачи, лучше выполнить одну передачу со всеми объединенными, чем выполнять 100 отдельных передач.
Это также верно для передачи памяти и графического процессора.
- При объединении вы должны делать это на месте (без использования нового буфера), чтобы сэкономить накладные расходы ОЗУ.
- После объединения строк необходимо указать, откуда пришли исходные строки. Это можно сделать двумя способами: с помощью массива индексов или растрового изображения. Оптимальный способ зависит от процента строк, которые необходимо скопировать, и оба способа могут быть сжаты.
- На самом деле некоторые строки отображаются чаще, чем другие: независимо от языка, слова подчиняются zipfian-распределению, а не равномерному распределению. Это имеет значение, если вы намереваетесь разделить свое общение (разделить матрицу встраивания на несколько разделов).Например, если матрица внедрения отсортирована в порядке от наиболее часто употребляемых слов до наименее часто встречающихся и мы хотим разбить эту матрицу на четыре раздела, первый раздел будет обновляться гораздо чаще, чем последний. В идеале мы бы рандомизировали строки матрицы, чтобы разделение матрицы на разделы не приводило к тому, что одни разделы обновлялись чаще, чем другие.
Проектирование систем для машинного обучения всегда связано с компромиссом. Чем мощнее фреймворк, тем сложнее его использовать.Матрица внедрения могла бы вписаться в стандартную форму тензора, как и любой другой параметр глубокого обучения, но если бы мы относились к ней как к любому другому параметру, мы бы потеряли возможность использовать преимущества ее разреженности (тот факт, что ее не нужно обновлять все вместе).
Если мы передаем только минимальную измененную информацию — строки матрицы внедрения, которые были обновлены для данного шага — мы можем распределить всю работу, передавая меньше информации. Это эффективно увеличивает эффективность распараллеливания задачи в целом.
Матрицы внедрения — не единственные параметры особого случая в машинном обучении — разреженность может проявляться во многих формах. В общем, параметры можно разделить на три категории: хранятся и передаются редко (аналогично хэш-картам), хранятся плотно и редко передаются (встраиваемые матрицы) или хранятся и передаются плотно (традиционные тензоры). При разработке систем для решения больших семейств алгоритмов машинного обучения необходимо поддерживать все три семейства.
Цифровая рентгеновская визуализация [плотность, размер матрицы, битовая глубина, динамический диапазон, частота дискретизации] • Принципы работы радиологии
Рассмотрены основные концепции цифровых детекторов рентгеновского излучения, включая важные концепции. Цифровые детекторы разделены на небольшие отдельные компоненты, называемые элементами детектора (ДЭС), а размер отдельных ДЭС называется шагом пикселя. В то время как размер матрицы — это количество ДЭС в каждом направлении на детекторе. Диапазон сигнала, в котором детектор может точно отображать измеренные рентгеновские лучи, — это динамический диапазон.Битовая глубина — это количество отдельных компьютерных битов, используемых при сохранении значения для каждого DEL.
Здесь мы обсуждаем терминологию, относящуюся к размеру каждого элемента детектора, так что когда вы будете использовать такие определения, как шаг детектора или доля заполнения, вы будете хорошо понимать значение.
Детекторные элементы
Как и цифровая фотография, рентгеновские изображения формируются с помощью цифровых элементов (ДЭЛ). Когда изображение сохраняется после его получения или когда оно отображается на мониторе, отдельные элементы называются элементами изображения (пикселями).
Для ясности мы используем другую терминологию для описания физических детекторных элементов (DEL).
Шаг детектора определяется как расстояние от конца до конца в пределах DEL. Следовательно, меньший размер DEL приведет к меньшему шагу.
Кроме того, в каждой DEL есть область, которая может обнаруживать рентгеновские лучи, и неактивная область (например, электроника каждой DEL). Область, в которой могут взаимодействовать рентгеновские лучи, называется активной областью.Область, которая не может обнаруживать рентгеновские лучи, называется неактивной областью.
Отношение активной области DEL к полному размеру каждого DEL называется «фракцией заполнения».
Таким образом, степень заполнения детектора будет числом от 0 до 1. Чем больше степень заполнения, тем больше рентгеновских лучей будет захвачено в измерениях. Таким образом, более высокая фракция заполнения будет более эффективной по дозе. В общем, по мере того, как размер каждого DEL становится меньше, задача состоит в том, чтобы гарантировать, что доля заполнения остается высокой, поскольку для каждого DEL имеется соответствующая электроника.
Rad Take-Home Point : Цифровой детектор рентгеновского излучения можно разделить на детекторные элементы (DEL), и каждый элемент имеет долю заполнения, которая указывает геометрическую эффективность детектора для сбора рентгеновского сигнала.
Размер матрицы
Матрица детектора состоит из множества отдельных ДЭС. Размер матрицы — двумерное число. Если размер матрицы 1024 x 1024, это означает, что матрица имеет более одного миллиона DEL.
Существуют также медицинские плоскопанельные детекторы с матрицами 4288 × 4288.
Мы можем поместить эти числа в контекст, который мы можем сравнить с цифровыми камерами, где размер матрицы обычно указывается в мегапикселях. Детектор 1024 × 1024 равен 1 мегапикселю. Мегапиксель определяется как 2 20 , что немного больше 1 миллиона. Детектор размером 4288 × 4288 эквивалентен датчику 17,5 мегапикселей по количеству пикселей.
Rad Take-home Point : Размер матрицы цифрового детектора рентгеновского излучения показывает, сколько элементов во всем детекторе.
Частота дискретизации
Еще одна важная характеристика цифрового плоскопанельного детектора — частота дискретизации детектора. Это еще один способ выразить размер каждого Del.
Частота дискретизации обратно пропорциональна шагу пикселя.
Если DEL больше (т. Е. Имеют больший шаг), то частота дискретизации будет меньше. Если DEL меньше, то частота дискретизации будет выше.
Rad Take-home Point : частота дискретизации обратно пропорциональна высоте тона каждой Del.
Пример расчетов
Давайте рассмотрим пример, чтобы понять, как рассчитываются эти параметры.
Если представить, что размер нашего детектора составляет 50 см x 50 см, а размер матрицы — 1000 x 1000. Итак, размер пикселя, согласно формуле, будет:
Итак, частота дискретизации будет рассчитана следующим образом:
Мы также можем рассчитать коэффициент заполнения для примера. Если размер DEL составляет 1 мм x 1 мм, а размер активной области равен 0.5 мм x 0,5 мм, какая будет активная область?
Это будет считаться детектором с низкой долей заполнения, поскольку только одна четверть площади детектора является активной и регистрирует рентгеновские лучи.
Rad Take-home Point : Как и в случае с цифровой фотографией, существует несколько основных параметров, которые характеризуют цифровой детектор рентгеновского излучения на высоком уровне.
Обзор
В большинстве рентгеновских систем в США используются цифровые детекторы рентгеновского излучения (плоскопанельные детекторы с прямым или прямым преобразованием) или так называемая компьютерная радиография, в которой также используются цифровые считывающие устройства.
Поскольку вы являетесь технологом-радиологом или студентом и используете или скоро будете использовать эти системы много раз в день, вы, вероятно, заинтересуетесь важными концепциями о том, как формируется цифровое изображение.
Физика, лежащая в основе различных типов детекторов, будет рассмотрена в другом посте, но здесь мы сосредоточимся на общих чертах всех цифровых рентгеновских систем.
R a d Точка отсчета : Рентгеновские лучи взаимодействуют с детектором, создавая аналоговый сигнал, который затем преобразуется в цифровой сигнал (число для каждого элемента детектора) в детекторе.
Битовая глубина
Мы начнем с примера наиболее распространенного детектора рентгеновского излучения в клинической практике. В детекторе непрямого рентгеновского излучения, когда рентгеновские лучи попадают в детектор, они преобразуются в фотоны видимого света. Эти световые фотоны измеряются фотодиодом, который преобразует их в электроны.
В этом случае количество электронов является аналоговым сигналом, и он оцифровывается по мере прохождения электронов через цепи, и каждому элементу детектора присваивается единый номер.
Цифровая схема преобразует энергию, вложенную в детектор, в дискретизированное (то есть оцифрованное) число. На рисунке вы можете увидеть влияние количества бинов на оцифровку. Слева истинная энергия. Справа представлены оцифрованные версии сигнала с разной битовой глубиной.
Когда сигнал оцифрован, каждый бит будет установлен на 0 или 1. Он установлен на 1, если истинный сигнал выше уровня и установлен на 0, если истинный сигнал ниже уровня.
Количество уровней оцифровки напрямую зависит от того, сколько бит имеет детектор в схеме аналого-цифрового преобразования: количество уровней = 2 N , где N — битовая глубина.
Итак, если мы используем 4-битное преобразование энергии в цифровой сигнал, точность будет намного меньше, чем в случае 8-битного или 16-битного преобразования. В общем, чем больше у вас уровней (т.е. чем выше битовая глубина), тем точнее будет изображение.
Rad Take-Home Point : Во всех цифровых детекторах рентгеновского излучения аналоговый сигнал преобразуется в цифровой, и преобразование становится более точным при использовании более высокой битовой глубины.
Динамический диапазон
Динамический диапазон также является частью процесса оцифровки и связан с битовой глубиной. Динамический диапазон — это диапазон, в котором сигнал будет правильно оцифрован. Например, для сигналов, которые выше, чем верхний предел динамического диапазона, считываемый сигнал будет насыщенным, поскольку он не может обрабатывать высокие уровни сигнала.
Как обсуждалось в предыдущем разделе, существует желание уменьшить размер каждого бина оцифровки. Этого можно добиться, добавив больше ячеек, как описано выше. Длина каждого бункера также может быть уменьшена за счет уменьшения поддерживаемого диапазона. Этот диапазон поддерживаемых уровней сигнала называется динамическим диапазоном системы. Высота каждого бина оцифровки проста: высота цифрового бина = динамический диапазон / (количество бинов -1).
На этом рисунке вы можете увидеть проблемы, которые могут возникнуть, и почему необходимо тщательно выбирать динамический диапазон и битовую глубину.На рисунке динамический диапазон изменен, а битовая глубина остается постоянной.
Если динамический диапазон системы слишком мал, тогда сигналы с очень высоким уровнем сигнала будут насыщены, и истинное значение не будет записано, а будет использоваться только самое высокое значение, с которым система может записывать.
С другой стороны, если динамический диапазон слишком велик, при преобразовании будут потеряны биты, которые никогда не используются, и каждый бит будет охватывать больший диапазон сигнала.Поскольку желательно, чтобы каждый бит охватывал меньший диапазон сигнала, чрезмерно большой динамический диапазон также не является оптимальным.
В оптимальном случае динамический диапазон системы будет охватывать почти все уровни сигнала, которые ожидаются в системе, так что насыщения не произойдет, но он не будет настолько большим, чтобы возникли значительные ошибки оцифровки. Когда динамический диапазон выбран надлежащим образом, это «хорошо отобранная» область на рисунке.
На клинических изображениях, если детектор не имеет достаточно большого динамического диапазона, значения в областях очень высокого сигнала, таких как легкие, будут насыщенными, и структурные различия в легочной ткани будут потеряны.
Rad Take-home Point : Диапазон всех значений, которые правильно оцифрованы, известен как динамический диапазон детектора, и динамический диапазон должен быть выбран соответствующим образом, чтобы уменьшить размер каждой ячейки выборки, но без насыщения.
Пространственное разрешение, размер пикселя и масштаб
Для некоторых инструментов дистанционного зондирования расстояние между отображаемой целью и платформой играет большую роль в определении детализации получаемой информации и общей площади, отображаемой датчиком.Датчики на борту платформ, удаленные от своих целей, обычно видят большую площадь, но не могут предоставить подробные сведения. Сравните то, что астронавт на борту космического челнока видит на Земле, с тем, что вы видите с самолета. Астронавт мог одним взглядом увидеть всю вашу провинцию или страну, но не мог различить отдельные дома. Пролетая над городом или поселком, вы сможете увидеть отдельные здания и автомобили, но вы будете видеть гораздо меньшую площадь, чем космонавт. Аналогичная разница между изображениями со спутника и аэрофотоснимками.
Детализация, различимая на изображении, зависит от пространственного разрешения датчика и относится к размеру наименьшего возможного объекта, который может быть обнаружен. Пространственное разрешение пассивных датчиков (мы рассмотрим особый случай активных микроволновых датчиков позже) зависит в первую очередь от их мгновенного поля зрения (IFOV) . IFOV представляет собой угловой конус видимости датчика (A) и определяет область на поверхности Земли, которая «видна» с заданной высоты в определенный момент времени (B).Размер просматриваемой области определяется умножением IFOV на расстояние от земли до датчика (C). Эта область на земле называется ячейкой с разрешением и определяет максимальное пространственное разрешение датчика. Для обнаружения однородного объекта его размер, как правило, должен быть равен или больше ячейки разрешения. Если объект меньше этого размера, он может быть не обнаружен, поскольку будет записана средняя яркость всех функций в этой ячейке разрешения.Однако иногда могут быть обнаружены более мелкие детали, если их отражательная способность преобладает в пределах суставной ячейки разрешения, позволяя обнаруживать субпиксельные ячейки или ячейки разрешения.
Как мы упоминали в главе 1, большинство изображений дистанционного зондирования состоят из матрицы элементов изображения, или пикселей , которые являются наименьшими единицами изображения. Пиксели изображения обычно имеют квадратную форму и представляют собой определенную область изображения. Важно различать размер пикселя и пространственное разрешение — они не взаимозаменяемы.Если датчик имеет пространственное разрешение 20 метров и изображение с этого датчика отображается с полным разрешением, каждый пиксель представляет собой площадь 20 м x 20 м на земле. В этом случае размер пикселя и разрешение одинаковы. Однако можно отображать изображение с размером пикселя, отличным от разрешения. На многих плакатах со спутниковыми изображениями Земли пиксели усреднены для представления более крупных областей, хотя исходное пространственное разрешение датчика, собравшего изображения, остается прежним.
Считается, что изображения, на которых видны только крупные элементы, имеют грубое или низкое разрешение . На изображениях с высоким или высоким разрешением можно обнаружить небольшие объекты. Например, военные датчики предназначены для просмотра как можно большего количества деталей и, следовательно, имеют очень высокое разрешение. Коммерческие спутники предоставляют изображения с разрешением от нескольких метров до нескольких километров. Вообще говоря, чем выше разрешение, тем меньше видна общая площадь земли.
Отношение расстояния на изображении или карте к фактическому расстоянию до земли называется масштабом. Если бы у вас была карта в масштабе 1: 100 000, объект длиной 1 см на карте фактически был бы объектом длиной 100 000 см (1 км) на земле. Карты или изображения с малым «соотношением карты к поверхности земли» называются малым масштабом (например, 1: 100 000), а карты с большим соотношением (например, 1: 5 000) называются крупномасштабными.
Знаете ли вы?
Если IFOV для всех пикселей сканера остается постоянным (что часто бывает), то площадь земли, представленная пикселями в надире, будет иметь больший масштаб, чем те пиксели, которые находятся вне надира.Это означает, что пространственное разрешение будет варьироваться от центра изображения до края полосы обзора.
Викторина
1. Посмотрите на детали, видимые на каждом из этих двух изображений. Какое из двух изображений имеет меньший масштаб? Какие подсказки вы использовали, чтобы это определить? Скорее всего, платформой для получения изображения меньшего масштаба был спутник или самолет?
Ответ …2. Если вы хотите контролировать общее состояние всего растительного покрова в провинциях канадских прерий в течение нескольких месяцев, какой тип платформы и характеристик датчиков (пространственное, спектральное и временное разрешение) лучше всего подходят для этого и почему?
Ответ есть…Whiz quiz — ответ
Ответ 1: Изображение слева со спутника, а изображение справа — фотография, сделанная с самолета. Область, покрытая изображением справа, также покрыта изображением слева, но это может быть трудно определить, поскольку масштабы двух изображений сильно различаются. Мы можем идентифицировать относительно небольшие объекты (например, отдельные здания) на изображении справа, которые не различимы на изображении слева.На левом изображении можно определить только общие элементы, такие как узоры улиц, водные пути и мосты. Поскольку на изображении справа элементы кажутся крупнее, а конкретное измерение (например, 1 см) на изображении представляет меньшее истинное расстояние на земле, это изображение имеет больший масштаб. Это аэрофотоснимок здания парламента в Оттаве, Канада. Левое изображение — это спутниковый снимок города Оттава.
Ответ 2: Спутниковый датчик с большой зоной покрытия и довольно грубым пространственным разрешением отлично подойдет для мониторинга общего состояния здоровья растительности над Альбертой, Саскачеваном и Манитобой.Большое пространство с востока на запад лучше всего будет покрывать датчик с широкой полосой обзора и широким охватом. Это также означало бы, что пространственное разрешение датчика было бы довольно грубым. Однако мелкие детали действительно не нужны для мониторинга широкого класса, включая весь растительный покров. При широком охвате территории период повторного посещения будет короче, что повысит возможность повторного охвата, необходимого для отслеживания изменений.


