3DNews Новости Software Приложения для Android Google создала ИИ-инструмент для устране… Самое интересное в обзорах 25.08.2022 [19:19], Руслан Авдеев Команда Google Research работает над новым инструментом устранения шумов на фотографиях, основанном на алгоритмах искусственного интеллекта. Ожидается, что новое решение позволит качественно реконструировать тёмные сцены, оставляя лишь минимальные артефакты, и оно будет намного эффективнее, чем существующие сегодня решения. Источник изображения: Rafael Leão/unsplash.com Элементы искусственного интеллекта при обработке фотографий применяется уже давно, особенно в смартфонах и программном обеспечении для обработки фото после съёмки. Представленная Google Research технология позволяет фотографам «видеть в темноте». Новый инструмент RawNeRF является частью проекта с открытым кодом MultiNeRF. Он будет особенно полезен тем, кто станет снимать тёмные сцены — это можно будет делать с минимальной потерей качества. Технология NeRF (Neural Radiance Fields) представляет собой синтезатор, способный сканировать многочисленные RAW-изображения и воздавать точный 3D-рендер. По данным Google, технология RawNeRF способна объединять снимки, сделанные с разных ракурсов, для устранения шума и реконструкции сцены. Может меняться экспозиция, отображение тонов и фокусировка. Для демонстрации возможностей RawNeRF используется сделанное на смартфон фото. Появление новой технологии в смартфонах и камерах может действительно поменять «правила игры» как в среде профессиональных фотографов, так и среди любителей со смартфонами. Как утверждает издание Techspot, пока на рынке отсутствуют инструменты устранения шумов, способны обеспечить сопоставимое качество изображения. Источник: Если вы заметили ошибку — выделите ее мышью и нажмите CTRL+ENTER. Материалы по теме Постоянный URL: https://3dnews.ru/1072945/noviy-iiinstrument-ustraneniya-shumov-razrabotanniy-google-pomenyaet-pravila-igri-pri-syomke-v-sumerkah Рубрики: Новости Software, Новости сети, программное обеспечение, ПО для мобильных устройств, Графические редакторы, 3D-графика, 3D-технологии, Приложения для Android, Искусственный интеллект, машинное обучение, нейросети, Теги: google, rawnerf, фотография, ии ии ← В прошлое В будущее → |
 Возможность качественного устранения шума на фото — одна из самых востребованных функций, поскольку даже лучшие сенсоры не могут снимать полностью без артефактов, особенно при недостатке освещения.
Возможность качественного устранения шума на фото — одна из самых востребованных функций, поскольку даже лучшие сенсоры не могут снимать полностью без артефактов, особенно при недостатке освещения.
Страница не найдена | Другой город
404 Error — page not found
We’re sorry, but the page you are looking for doesn’t exist.
You can go to the homepage
OUR LATEST POSTS
ФК «Акрон» из Тольятти выбил московский «Спартак» из Кубка России по футболу. Команда из Самарской области вышла в первый этап финала «Пути регионов» турнира.
«Акрон» забил два гола под конец первого тайма. На 41-й минуте отличился Андрес Понсе, спустя 4 минуты — Никита Салтыков. Во втором тайме «Спартак» отыграл один мяч.
Встреча в Жигулёвске завершилась со счетом 2:1 в пользу «Акрона».
Тольяттинский клуб вышел в финал Кубка России и сыграет с победителем матча «Краснодар» vs «Крылья Советов». Это будет первый этап «Пути регионов» Кубка России. Матч пройдёт 4 мая.
Если «Акрон» выиграет, то 17 мая во втором этапе «Пути регионов» сыграет с проигравшим в финале «Пути РПЛ» – «Уралом» или ЦСКА.
Если пройдёт дальше, то 11 июня — Суперфинал. В «Лужниках» сыграют победители «Пути РПЛ» и «Пути регионов».
Напомним, тольяттинский клуб «Акрон» выступает в ФНЛ. Сейчас он занимает 12 строчку в турнирной таблице.
Сейчас он занимает 12 строчку в турнирной таблице.
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
Компания «Транспорт будущего» приобрела активы в ОЭЗ «Тольятти» и приступает к строительству завода по производству беспилотных авиационных систем (БАС).
Для реализации проекта выкупили территорию площадью более 40 тыс. кв. метров. К строительным работам приступят уже в апреле 2023 года.
Модельный ряд компании представлен аэротакси и большим грузовым беспилотником взлетной массой до 700 кг.
Сами авиасистемы предназначены для доставки пассажиров и грузов в труднодоступные места, помощи при ликвидации чрезвычайных ситуаций, мониторинга и обработки сельскохозяйственных полей и др.
Компания планирует не только собирать БАС в Тольятти, но и производить все ключевые структурные элементы: винты, двигатели, драйверы, детали корпуса, авионику и др.
В следующем году в Тольятти планируют выпустить уже 3 тысячи беспилотников.
Фото: «Транспорт будущего»
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
На сайте городской думы опубликовали проект изменений в правила использования средств индивидуальной мобильности (СИМ), передвигающихся с помощью двигателя, — электросамокатов, электроскейтбордов, гироскутеров, сигвеев, моноколёс.
Для СИМ определена максимальная скорость передвижения — 25 км/ч. Предусмотрено, что перемещаться по тротуарам, велодорожкам и пешеходным дорожкам можно на транспорте весом не более 35 кг.
В документах указано, что СИМ запретят оставлять на остановках общественного транспорта и в пяти метрах от них, а также на проезжей части, газонах и цветниках, в арках зданий и около мемориальных сооружений.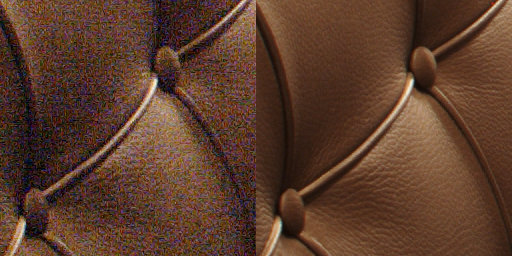
СИМ нельзя будет крепить к зеленым насаждениям, ограждениям и перилам, урнам, рекламным конструкциям, малым архитектурным формам, объектам туристической навигации, системам инженерно-технического обеспечения на фасадах домов и сооружений, опорам уличного освещения, дорожным знакам и другим элементам улично-дорожной сети, остановочным павильонам.
В документах также уточняется, что СИМ должны быть расположены так, чтобы они не мешали пользоваться наземными и подземными переходами, заходить в здания.
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
В Самаре планируют обустроить территорию в границах улиц Лесной, Северо-Восточной магистрали, Ново-Садовой, Постникова Оврага, Саперной, Липецкой, Автобусного проезда, Скляренко, Николая Панова, проспекта Масленникова.
Ранее здесь располагались заводы имени Масленникова, КИНАП и Силикатный завод.
Вдоль Волги планируется строительство набережной, что прописано в проекте планировки территории.
Как пояснили специалисты регионально правительства, появится общее рекреационное пространство площадью 27 га, соединенное с набережной у Ладьи.
Кроме того, проектом предусматривается строительство пешеходного бульвара от КРЦ «Звезда» до новой очереди набережной.
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
Об этом сообщает «Самарское речное пассажирское предприятие».
По каждому направлению суда ходят ежедневно из Самары:
в Ширяево — в 8:30. Прибытие в 11:00. Обратно — в 16:00;
Обратно — в 16:00;
в Шелехметь — в 8:15 и 16:00. Прибытие в 9:15 и 17:00. Обратно — в 9:30 и 17:15;
на Гаврилову Поляну — в 7:45. Прибытие в 10:00. Обратно — в 17:20.
Актуальную информацию перед поездкой можно уточнить здесь.
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
Во вторник, 18 апреля, на улице Галактионовской загорелись два деревянных дома №№ 241 (нежилой, двухэтажный) и 243 (жилой, одноэтажный).
Площадь пожара составляет 300 кв. м.
Как сообщили в ГУ МЧС России по Самарской области, на месте работает 65 человек, 17 единиц техники. В том числе от МЧС — 54 человека и 13 единиц техники.
Погибших и пострадавших нет.
По словам очевидцев, движение по улице Галактионовской перекрыто в границах улиц Маяковского и Полевой.
Напомним, фасады этих домов приводили в порядок перед ЧМ-2018. Вот как они выглядели четыре года назад.
Вот как они выглядели четыре года назад.
Фото и видео от очевидцев и ГУ МЧС России по Самарской области
Фото домов до пожара: Елена Вагнер
Следите за нашими публикациями в Telegram на канале «Другой город» и ВКонтакте
App Store: Шумоподавление фото
Описание
С помощью этого приложения вы можете удалить шум с ваших фотографий, не теряя деталей и не получая слишком много размытия! Качественное удаление шума сделает это приложение обязательным инструментом. Загрузите сейчас, это БЕСПЛАТНО без покупок в приложении!
≈ ОСОБЕННОСТИ ≈
Простота в использовании! Это приложение делает большую часть магии автоматически. Нет необходимости в утомительных корректировках и трудоемких усилиях. Обеспечьте шумоизоляцию ваших фотографий за считанные секунды!
Настройка уровня шумоподавления и резкости. Используйте ползунки для быстрой настройки параметров, чтобы получить идеальное изображение.
Используйте ползунки для быстрой настройки параметров, чтобы получить идеальное изображение.
Быстрый предварительный просмотр шумоподавляющих и исходных фотографий, чтобы оценить качество процесса удаления шума.
≈ ПОДДЕРЖКА ≈
Нам всегда интересно ваше мнение! Отправьте нам электронное письмо и свяжитесь с нами.
Версия 1.0
Компания Apple обновила это приложение, и теперь на нем отображается значок приложения Apple Watch.
Рейтинги и обзоры
16 оценок
Буквально никакой разницы
Я неоднократно проверял разницу в приложении, и она не отличалась
Идеальный
Другие обзоры просто сбиты с толку, потому что кнопка «показать оригинал» не работает, а их зрение недостаточно хорошо, чтобы увидеть разницу при перемещении полосы.
Это приложение работало идеально и кажется единственным доступным приложением для удаления зерна. Хотя бы для поиска «шумоподавление».
Хорошее приложение
Не обращайте внимания на плохие отзывы, они не знают, что делают
Разработчик, Flamethrower, не предоставил Apple подробностей о своей политике конфиденциальности и обработке данных.
Сведения не предоставлены
Разработчик должен будет предоставить сведения о конфиденциальности при отправке следующего обновления приложения.
Информация
- Продавец
- Огнемет плк
- Размер
- 12,9 МБ
- Категория
- Фото и видео
- Возрастной рейтинг
- 4+
- Авторское право
- © ПЛК огнемета
- Цена
- Бесплатно
- Тех.
 поддержка
поддержка
Еще от этого разработчика
Вам также может понравиться
Шум изображения — разработка изображений
Содержание
- Введение
- Проблема с шумом
- Типы шума
- Временной шум (случайный шум)
- Пространственный шум (структурный шум или неоднородный шум)
- Цветовой шум в сравнении с интенсивным шумом
- Источники шума
- Фотонный шум
- Шум чтения
- Улучшение шума
- Как измерить шум?
- ISO 15739 СНР
- Измерение шума с использованием шаблона мертвых листьев
- Стандарты шума (которые мы используем)
- ISO 15739 Визуальный шум
- EMVA 1288 Неоднородности
- Заключение
- Ссылки
Введение
Шум на изображении — это наличие артефактов, не связанных с исходным содержимым сцены. Вообще говоря, шум — это статистическая вариация измерения, создаваемая случайным процессом. В изображении шум появляется как артефакт на изображении, который выглядит как зернистая структура, покрывающая изображение.
Вообще говоря, шум — это статистическая вариация измерения, создаваемая случайным процессом. В изображении шум появляется как артефакт на изображении, который выглядит как зернистая структура, покрывающая изображение.
Шум может иметь различные формы и проявления на изображении и в большинстве случаев является нежелательным или мешающим артефактом, снижающим субъективное качество изображения.
Изображение 1: пример того, как шум может сильно повлиять на качество изображения.Проблема с шумом
Шум является побочным продуктом нерегулярных колебаний сигнала, сопровождающих передаваемый сигнал. Здесь важно понимать, что эти колебания не являются частью сигнала и вместо этого скрывают намеченную цель.
Таким образом, одной из самых важных задач в визуализации является поиск решения для создания сильного сигнала с минимальным количеством шума рядом с ним. К сожалению, поиск решения часто оказывается серьезной проблемой при визуализации, особенно в условиях слабого освещения, когда сигнал уже слабый. При работе с шумом изображения первым шагом является определение типа шума, с которым вы сталкиваетесь.
При работе с шумом изображения первым шагом является определение типа шума, с которым вы сталкиваетесь.
Типы шума
В цифровых изображениях мы сталкиваемся с различными типами шума. К сожалению, термины и определения немного отличаются в разных стандартах и публикациях, что затрудняет согласование одного или двух решений. В этой статье мы стараемся охватить наиболее широко используемые определения и решения.
Изображение 2: Временной шум (слева) и пространственный шум (справа).Временной шум (случайный шум)
Временной шум почти всегда полностью случайный и является результатом изменений в генерации цифрового значения из одного пикселя путем преобразования поступающих фотонов в электроны. Кроме того, количество фотонов, попадающих в один пиксель во время экспозиции, будет разным. Эта процедура известна как фотонный дробовой шум.
Если мы наблюдаем один и тот же пиксель на изображении, снятом несколько раз, мы увидим, что этот пиксель колеблется между различными изображениями, как показано на изображении 2. Даже если сцена изображения не меняется, мы все равно увидим изменение в цифровое значение, которое мы получаем от этого конкретного пикселя.
Даже если сцена изображения не меняется, мы все равно увидим изменение в цифровое значение, которое мы получаем от этого конкретного пикселя.
Пространственный шум (структурный шум или неоднородный шум)
Изменения в отдельных пикселях обычно вызывают пространственный шум и поэтому не являются случайными. Этот тип шума часто называют «неоднородностью», поскольку сам термин «шум» подразумевает случайный процесс. В стандарте EMVA1288 используется термин «неравномерность», а в стандарте ISO 15739 используется термин «шум с фиксированной структурой».
Пиксели, расположенные рядом друг с другом на датчике, будут отображать различия в своих цифровых значениях, даже если объекты равны. В результате каждый пиксель будет демонстрировать немного отличающееся поведение, что приводит к слегка контрастирующим цифровым значениям.
Имейте в виду, что различия между пикселями также могут быть вызваны временным шумом. Различные формы пространственного шума можно наблюдать только при минимизации временного шума. Этот процесс обычно выполняется путем усреднения сотен изображений, чтобы свести к минимуму случайную составляющую. Оставшееся (усредненное) изображение покажет только пространственный шум.
Этот процесс обычно выполняется путем усреднения сотен изображений, чтобы свести к минимуму случайную составляющую. Оставшееся (усредненное) изображение покажет только пространственный шум.
Одной из форм пространственного шума является неравномерность отклика пикселей (PRNU), небольшое изменение чувствительности каждого пикселя. Dark Signal Non-Uniformity (DSNU) — это еще одна форма, которая имеет небольшую дисперсию между пикселями в их сигнале, или, проще говоря, генерируемом сигнале в отсутствие света.
Изображение 3: Усреднение изображений для уменьшения присутствия шума.Цветовой шум в сравнении с интенсивным шумом
В предыдущем разделе мы проанализировали поведение только отдельных пикселей и их соседей от монохромных сенсоров. Эти датчики будут показывать шум только как изменение интенсивности. Однако датчики цвета будут отображать как шум интенсивности, так и шум цвета.
Цветовой шум создается и усиливается во время генерации информации о цвете. По сути, один пиксель фиксирует только информацию о цвете для определенной полосы светового спектра (например, красного, зеленого или синего). Этот процесс действителен почти для всех типов датчиков.
По сути, один пиксель фиксирует только информацию о цвете для определенной полосы светового спектра (например, красного, зеленого или синего). Этот процесс действителен почти для всех типов датчиков.
Цветовой шум связан с процессом, известным как демозаика. По сути, отсутствующая информация о цвете интерполируется из соседнего пикселя, чтобы обеспечить получение красного, зеленого и синего в каждом пикселе. В результате шум отдельного пикселя будет влиять на цветовую информацию соседнего пикселя. В процессе интерполяции шум в этих пикселях будет размазываться.
Типичным сценарием цветового шума при изображении является сильный шум в синем канале и низкий уровень шума в зеленом и красном каналах. Интенсивный шум в синем канале также будет влиять на другие каналы из-за демозаики.
Важно отметить, что человек-наблюдатель гораздо более чувствителен к шуму интенсивности, чем к шуму цвета. Тем не менее, интенсивный цветовой шум все еще может мешать общему качеству изображения.
Источники шума
На изображении существует множество различных источников шума. Для упрощения мы можем различать два основных источника шума: фотонный шум и шум чтения.
Фотонный шум
Фотонный шум относится к шуму самого света. Если представить свет как поток фотонов, то мы увидим, что этот поток не является совершенно постоянным во времени. Для сравнения представьте прибор, измеряющий дождь на небольшой поверхности. Если у нас идет сильный дождь, мы можем точно указать число, которое является средним значением для поверхности за временной интервал. Тем не менее, очень слабый дождь покажет только несколько капель за временной интервал и быстро изменится для различных измерений.
Та же идея, что и в примере с дождем, применима и к фотонному шуму. Отношение сигнал-шум (SNR) равно квадратному корню сигнала фотонного шума. Проще говоря, чем больше у нас фотонов, тем лучше SNR, и наоборот.
Изображение 4: Чем больше у нас сигнала, тем лучше SNR. 1
1 Шум считывания
Шум считывания представляет собой совокупность нескольких типов источников шума в процессе считывания датчика. Во многих случаях шум постоянен, поэтому чем ниже уровень сигнала, тем хуже ОСШ. Точно так же, чем меньше количество фотонов, тем ниже SNR.
Когда мы строим отношение SNR к количеству фотонов на пиксель за экспозицию, мы можем разделить SNR на две области:
Ограничение шума считывания: Происходит, когда шум считывания настолько интенсивен, что SNR значительно ниже меньше, чем самое низкое отношение сигнал/шум, возникающее из фотонного дробового шума.
Ограничение фотонного дробового шума: Происходит, когда измеренное отношение сигнал/шум немного ниже самого высокого отношения сигнал-шум, которого можно достичь с фотонным дробовым шумом.
Улучшение шума
Идеальная камера (без шума считывания и шума квантования) не свободна от шума, но все же будет показывать фотонный дробовой шум. Однако имейте в виду, что чем меньше количество фотонов на пиксель за экспозицию, тем хуже ОСШ.
Однако имейте в виду, что чем меньше количество фотонов на пиксель за экспозицию, тем хуже ОСШ.
Чтобы улучшить шум на уровне сенсора, нужно уменьшить шум считывания и увеличить количество фотонов на пиксель за экспозицию. Большие пиксели будут собирать больше фотонов, а более длительное время экспозиции захватывает больше фотонов. Максимальная продолжительность выдержки зависит от приложения, поскольку оно также приводит к размытию изображения в движении. Таким образом, возможности для уменьшения шума ограничены, но во многих случаях обработка сигнала уменьшит шум от сигнала с помощью алгоритмов улучшения изображения и уменьшения шума.
Как измерить шум?
ISO 15739 SNR
Стандарт ISO 15739 описывает процедуру измерения и составления отчета об SNR камеры. 2 В этом методе используется тестовая мишень на основе ISO 14524, поэтому тестируемая камера может воспроизвести тестовую мишень в контролируемых условиях. 3 См. примеры целей ниже:
Изображение 5: Тестовая таблица OECF TE269 для измерения шума.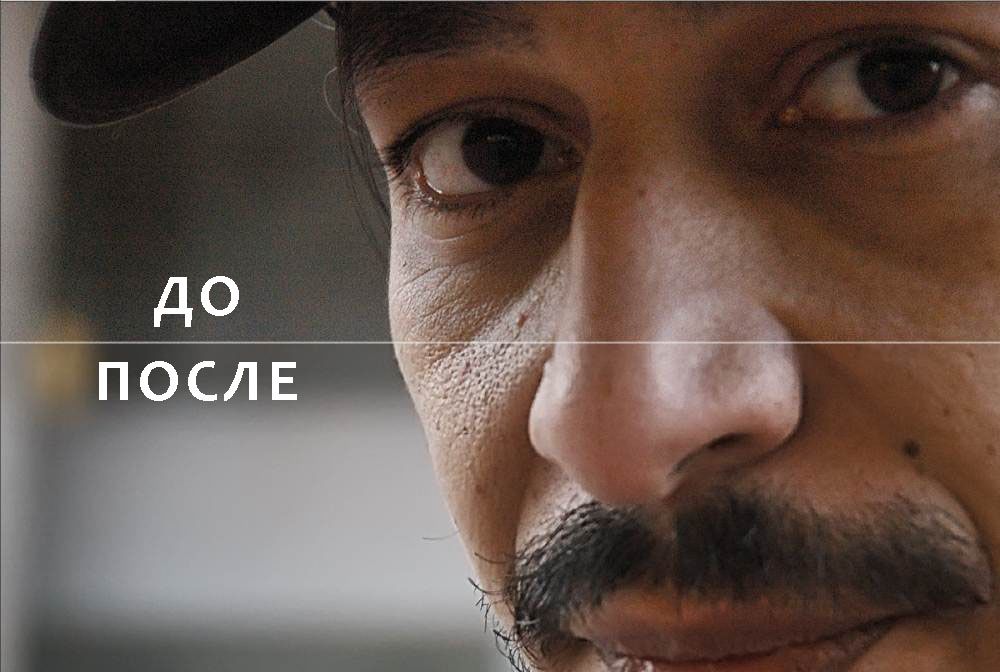 Изображение 6: Тестовая таблица TE270X для измерения шума.
Изображение 6: Тестовая таблица TE270X для измерения шума.SNR рассчитывается для каждого фрагмента тестовой мишени и представляет собой функцию отношения SNR к яркости. Чтобы сообщить одно число, следуйте нумерованному подходу.
- Извлечение L_ref из OECF
- Рассчитать L_SNR
- Интерполировать и сообщить SNR для L_SNR
Эталонная яркость (L_ref) — это самая низкая яркость, которая приводит к цифровому значению 245 в одном из трех каналов. Значение 245 допустимо для 8-битных изображений sRGB.
Если у нас есть L_ref, то мы можем легко рассчитать L_SNR как:
L SNR = 0,13 x L ref
Откуда берутся 0,13 или 13%? Идея состоит в том, чтобы рассчитать на 18% серой карте, но управление экспозицией камеры не будет подвергать 18% отражения 18% от максимального цифрового значения, поскольку это требует некоторого «запаса» для светлых участков изображения. ISO предполагает запас по высоте 140%, в результате чего получается 13%.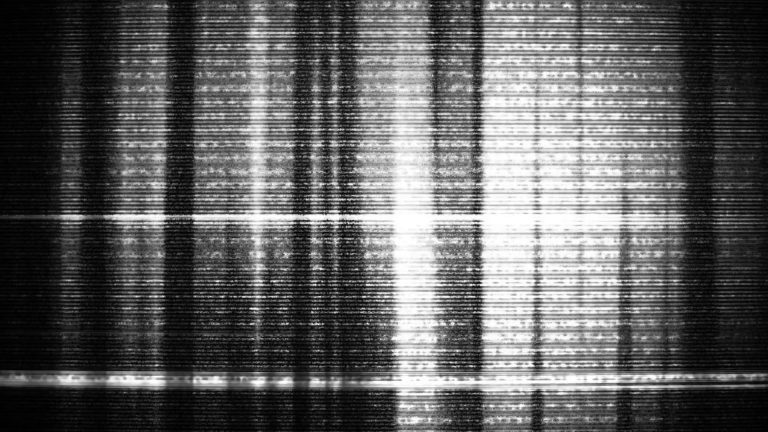
По существу, когда известно L_SNR, соответствующее значение SNR интерполируется из кривой SNR.
Измерение шума с помощью шаблона мертвых листьев
Другим вариантом измерения шума является использование шаблона мертвых листьев4. Этот паттерн состоит из случайного паттерна кругов разного диаметра и цвета, что дает нам неоднородный паттерн. Измерение шума с использованием неоднородного шаблона обеспечит лучшие результаты реальных характеристик шума и, в конечном итоге, приведет к лучшей корреляции взаимодействия с пользователем.
Изображение 7: Пример тестовой таблицы мертвых листьев.Стандарты шума (которые мы используем)
ISO 15739 Визуальный шум
Хотя значение SNR является хорошо зарекомендовавшим себя показателем для описания производительности сенсора, это не лучший выбор, если вы хотите выразить, сколько шума может видеть человек-наблюдатель.
ISO 15739 использует показатель, называемый визуальным шумом, который гораздо лучше коррелирует с человеческим восприятием шума, чем SNR.
Значение визуального шума понять просто: чем выше значение, тем больше шума увидит наблюдатель. Основное различие между SNR и VN заключается в том, что VN взвешивает шум в соответствии с видимостью. Шум, который не виден, не будет учитываться при измерении шума.
Откуда мы знаем, какой шум может/не может видеть человек-наблюдатель?
Мы можем смоделировать реакцию зрительной системы человека на пространственные частоты. По сути, функция контрастной чувствительности (CSF) и предположение об условиях просмотра позволяют нам рассчитать важность различных частей спектра шума. На изображении ниже изображение 1x будет иметь большую часть своего «шума» в области высоких пространственных частот и низкий отклик в CSF. Изображение 4x имеет большую часть своего «шума» на более низких пространственных частотах, и его легко наблюдать в соответствии с CSF. Таким образом, изображение 4x получает гораздо более высокое значение VN, чем 1x.
Изображение 8: шум 1x, 2x и 4x. Шум 4x имеет гораздо более высокое значение визуального шума, чем другие.
Шум 4x имеет гораздо более высокое значение визуального шума, чем другие.EMVA 1288 Неоднородность
EMVA (Европейская ассоциация машинного зрения) 1288 была создана, чтобы помочь покупателю выбрать лучшую камеру или датчик, отвечающий их требованиям. 5 Стандарт описывает надлежащую настройку тестирования, процедуру тестирования, алгоритмы и отчеты для тщательного тестирования шума в системе камер.
Тест с использованием этих рекомендаций даст следующие значения шума: неравномерность темнового сигнала (DSNU), соотношение сигнал/шум (SNR), неравномерность отклика пикселей (PRNU), темновой шум и темновой ток.
Заключение
Шум является побочным продуктом нерегулярных флуктуаций сигнала, которые сопровождают передаваемый сигнал, но эти флуктуации не являются частью сигнала и вместо этого затеняют намеченную цель. В результате одной из важнейших задач визуализации является поиск решения для создания сильного сигнала с минимальным количеством шума рядом с ним.