Matlab, Simulink
Matlab, SimulinkMatlab, Simulink
Популярные товары
Руководство по тренингу навыков при терапии пограничного расстройства личности1 765 ₽Предметно-ориентированное проектирование (DDD): структуризация сложных программных систем3 515 ₽PHP: объекты, шаблоны и методики программирования, 5-е издание1 765 ₽
Смотреть всеПомощь
+7 928 117-10-37
Отдел продаж
Если у вас возникли вопросы при оформлении заказа, обратитесь по указанным контактам.
12/24/36/48
Название
- Название
- Цена
- Хиты продаж
- Оценка покупателей
- Дата добавления
- В наличии
 ..Автор(ы):Дьяконов В. П., Круглов В. В.Издательство:СОЛОН-ПрессСерия:Библиотека профессионалаГод издания:2020ISBN:978-5-91359-381-8
..Автор(ы):Дьяконов В. П., Круглов В. В.Издательство:СОЛОН-ПрессСерия:Библиотека профессионалаГод издания:2020ISBN:978-5-91359-381-8Скидка!
Matlab Simulink. Компьютерное моделирование экономики. Библиотека профессионалаВ книге представлена современная практическая технология компьютерного моделирования экономики в программных системах Matlab Simulink. Моделирование необходимо для понимания причинно-следственных связей в экономике…Автор(ы):И. Ф. ЦисарьИздательство:СОЛОН-ПрессСерия:Библиотека профессионалаГод издания:2012ISBN:978-5-91359-006-0Simulink. СамоучительСамоучитель по новейшим реализациям пакета визуального блочного имитационного моделирования Simulink 5/6/7 матричной системы MATLAB R2006/2007. Подробно описаны библиотека блоков Simulink, методика подготовки диаграмм моделей, их редактирование, настройка и запуск на исполнение…Автор(ы):В. П. ДьяконовИздательство:ДМК ПрессГод издания:2015ISBN:978-5-97060-280-5Кол-во страниц:782Компьютерный анализ четырехполюсников с помощью MATLABНастоящая работа является учебно-методическим пособием по компьютерному анализу четырехполюсников с применением высокоуровневого языка, интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB R2019a. ..Автор(ы):Фриск В.В., Ганин В.И., Алексенцев Ю.Т., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-383-2Компьютерный анализ четырехполюсников с помощью MATLABНастоящая работа является учебно-методическим пособием по компьютерному анализу четырехполюсников. При анализе или при проектировании электрических цепей возникает необходимость определить токи и напряжения не во всей цепи, а на ограниченном участке цепи…Автор(ы):Фриск В.В., Ганин В.И., Алексенцев Ю.Т., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-382-5Компьютерный спектральный анализ сигналов с помощью MATLABНастоящая работа является учебно-методическим пособием по компьютерному анализу сигналов с применением высокоуровневого языка, интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB R2019a…Автор(ы):Фриск В.В., Ганин В.И., СеменоваТ.Н., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-385-6Методы и алгоритмы анализа данных и их моделирование в MATLABРассматриваются модели, методы и алгоритмы анализа данных, используемые в современных системах обработки информации.
..Автор(ы):Фриск В.В., Ганин В.И., Алексенцев Ю.Т., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-383-2Компьютерный анализ четырехполюсников с помощью MATLABНастоящая работа является учебно-методическим пособием по компьютерному анализу четырехполюсников. При анализе или при проектировании электрических цепей возникает необходимость определить токи и напряжения не во всей цепи, а на ограниченном участке цепи…Автор(ы):Фриск В.В., Ганин В.И., Алексенцев Ю.Т., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-382-5Компьютерный спектральный анализ сигналов с помощью MATLABНастоящая работа является учебно-методическим пособием по компьютерному анализу сигналов с применением высокоуровневого языка, интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB R2019a…Автор(ы):Фриск В.В., Ганин В.И., СеменоваТ.Н., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:Учебно-методическое пособиеГод издания:2020ISBN:978-5-91359-385-6Методы и алгоритмы анализа данных и их моделирование в MATLABРассматриваются модели, методы и алгоритмы анализа данных, используемые в современных системах обработки информации. Приводятся основные понятия и определения общей теории информационных систем…Автор(ы):А. А. СиротаИздательство:БХВ-ПетербургСерия:Учебное пособиеГод издания:2016ISBN:978-5-9775-3778-0Методы разработки математических моделей и вычислительный эксперимент на базе пакета MATLAB. Курс лекцийКурс содержит 15 лекций плюс программное приложение. Тематика лекций разбита на две части. В первой части (лекции №1 — №9) изложены численные методы решения базовых уравнений математической физики в частных производных…Автор(ы):К. Э. ПлохотниковИздательство:СОЛОН-ПрессВид издания:Курс лекцийСерия:Библиотека студентаГод издания:2020
Приводятся основные понятия и определения общей теории информационных систем…Автор(ы):А. А. СиротаИздательство:БХВ-ПетербургСерия:Учебное пособиеГод издания:2016ISBN:978-5-9775-3778-0Методы разработки математических моделей и вычислительный эксперимент на базе пакета MATLAB. Курс лекцийКурс содержит 15 лекций плюс программное приложение. Тематика лекций разбита на две части. В первой части (лекции №1 — №9) изложены численные методы решения базовых уравнений математической физики в частных производных…Автор(ы):К. Э. ПлохотниковИздательство:СОЛОН-ПрессВид издания:Курс лекцийСерия:Библиотека студентаГод издания:2020Скидка!
Моделирование и визуализация средствами Matlab физики наноструктурВ книге рассматриваются методы научной визуализации и особенности математического моделирования в нанотехнологиях. Наличие множества практических примеров применения MATLAB в этой области и эстетическая привлекательность позволяют использовать книгу как учебно-методическое пособие…Автор(ы):Матюшкин И.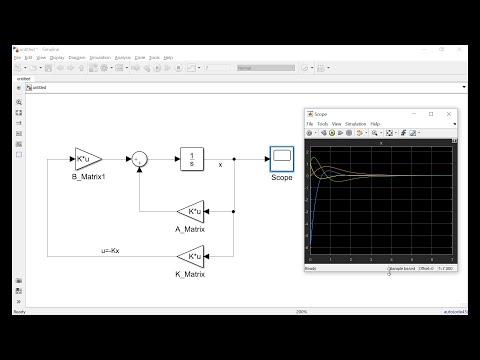 В.Издательство:ТехносфераСерия:Мир программированияГод издания:2011ISBN:978-5-94836-286-1Моделирование электротехнических устройств в Matlab, SimPowerSystems и Simulink. 2-е изд.В книге содержится описание прикладной программы Simulink и библиотеки блоков SimPowerSystems, предназначенной для моделирования электротехнических устройств и систем…Автор(ы):Черных И.В.Издательство:ДМК ПрессСерия:ПроектированиеГод издания:2014ISBN:978-5-97060-080-1, 978-5-94074-736-9Применение пакета MATLAB и SIMULINK для анализа электрических цепей Том 1 (практикум)Настоящий практикум является, по сути, сборником лабораторных работ по компьютерному анализу электрических цепей с применением интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB…Автор(ы):Фриск В.В., Ганин В.И., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:ПрактикумСерия:Библиотека студентаГод издания:2020Применение пакета MATLAB и SIMULINK для анализа электрических цепей Том 2 (практикум)Настоящий практикум является, по сути, сборником лабораторных работ по компьютерному анализу электрических цепей с применением интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB.
В.Издательство:ТехносфераСерия:Мир программированияГод издания:2011ISBN:978-5-94836-286-1Моделирование электротехнических устройств в Matlab, SimPowerSystems и Simulink. 2-е изд.В книге содержится описание прикладной программы Simulink и библиотеки блоков SimPowerSystems, предназначенной для моделирования электротехнических устройств и систем…Автор(ы):Черных И.В.Издательство:ДМК ПрессСерия:ПроектированиеГод издания:2014ISBN:978-5-97060-080-1, 978-5-94074-736-9Применение пакета MATLAB и SIMULINK для анализа электрических цепей Том 1 (практикум)Настоящий практикум является, по сути, сборником лабораторных работ по компьютерному анализу электрических цепей с применением интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB…Автор(ы):Фриск В.В., Ганин В.И., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:ПрактикумСерия:Библиотека студентаГод издания:2020Применение пакета MATLAB и SIMULINK для анализа электрических цепей Том 2 (практикум)Настоящий практикум является, по сути, сборником лабораторных работ по компьютерному анализу электрических цепей с применением интерактивной среды для программирования, численных расчетов и визуализации результатов MATLAB.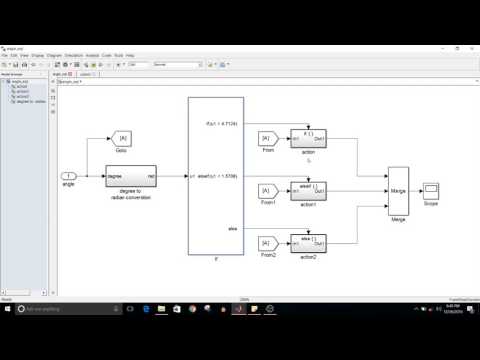 ..Автор(ы):Фриск В.В., Ганин В.И., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:ПрактикумСерия:Библиотека студентаГод издания:2020
..Автор(ы):Фриск В.В., Ганин В.И., Степанова А.Г.Издательство:СОЛОН-ПрессВид издания:ПрактикумСерия:Библиотека студентаГод издания:2020Избранное0
Сравнение0
Просмотренные0
Мы используем файлы cookie, чтобы сайт был лучше для вас.
Вестник Иркутского государственного технического университета
2018 / Том 22, №6 (137) 2018 [ ИНФОРМАТИКА, ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА И УПРАВЛЕНИЕ ]
ЦЕЛЬ. Работа посвящена созданию гибкого и универсального математического и программного обеспечения решения задач надежности с использованием структурной схемы надежности на основе Simulink. МЕТОДЫ. На основе известных методов анализа структурных схем надежности разработаны общие методические подходы и принципы построения программного обеспечения в виде отдельного дополнения (Toolbox) к Simulink. Разработаны алгоритмы и программы расчета характеристик надежности отдельных элементов технической системы и системы в целом. Алгоритмы и программы являются унифицированными, сгруппированы по назначению, предназначены для формирования математических моделей сложных систем. РЕЗУЛЬТАТЫ. В статье представлены некоторые примеры разработанных унифицированных блоков, которые позволяют получить полное представление о разработанном программном обеспечении и методологических принципах его применения. На примере простой структурной схемы надежности из пяти элементов демонстрируются возможности Toolbox по моделированию сложных структурных схем надежности. ВЫВОДЫ. Предлагаемое программное обеспечение позволяет разрабатывать математические модели структурных схем надежности любой сложности, выполнять вычислительный эксперимент по анализу их характеристик и оценку эффективности мероприятий по повышению надежности систем. Программное обеспечение позволяет достаточно просто модифицировать математические модели, организовывать программный интерфейс, обрабатывать результаты моделирования. Программное обеспечение является исключительно эффективным средством для использования в профессиональном образовании благодаря наглядности и информативности математического моделирования в задачах надежности.
РЕЗУЛЬТАТЫ. В статье представлены некоторые примеры разработанных унифицированных блоков, которые позволяют получить полное представление о разработанном программном обеспечении и методологических принципах его применения. На примере простой структурной схемы надежности из пяти элементов демонстрируются возможности Toolbox по моделированию сложных структурных схем надежности. ВЫВОДЫ. Предлагаемое программное обеспечение позволяет разрабатывать математические модели структурных схем надежности любой сложности, выполнять вычислительный эксперимент по анализу их характеристик и оценку эффективности мероприятий по повышению надежности систем. Программное обеспечение позволяет достаточно просто модифицировать математические модели, организовывать программный интерфейс, обрабатывать результаты моделирования. Программное обеспечение является исключительно эффективным средством для использования в профессиональном образовании благодаря наглядности и информативности математического моделирования в задачах надежности.
Ключевые слова:
SIMULINK,MATLAB,методы расчета параметров надежности,структурные схемы надежности,надежность технических систем,надежность машин,SIMULINK,MATLAB,methods for calculating reliability parameters,structural reliability schemes,reliability of technical systems,reliability of machines
Авторы:
- Кривель Сергей Михайлович
Библиографический список:
- Пятков А.Г. Методы анализа надежности космических аппаратов // Актуальные проблемы авиации и космонавтики. 2015. Т. 1. № 11. С. 500-502.
- Мищенко О.В., Апанасов А.А. Выбор методов анализа надежности для технических средств аэронавигационной системы // Научный Вестник Московского государственного технического университета гражданской авиации. 2013. № 189. С. 55-60.
- Можаев А.С. Аннотация программного средства «АРБИТР» (ПК АСМ СЗМА) // Научно-технический сборник «Вопросы атомной науки и техники. Сер.: Физика ядерных реакторов. М.: РНЦ «Курчатовский институт», 2008.
 Вып. 2. С. 105-116.
Вып. 2. С. 105-116. - Альгин В.Б., Вербицкий А.В., Мишута Д.В., Сиренко С.В. Расчет реальной надежности машин. Методики, программные средства, примеры // Механика машин, механизмов и материалов. 2011. № 2 (15). С. 11-17.
- Строгонов А.В., Жаднов В.К., Полесский С.М. Обзор программных комплексов по расчету надежности сложных технических систем // Компоненты и технологии. 2007. № 5. С. 183-190.
- Белова В.В. Возможности применения современных программных комплексов моделирования надежности систем для решения задач оценки надежности изделий ракетно-космической техники на этапе электрических испытаний // Космонавтика и ракетостроение. 2013. № 1 (70). С. 118-122.
- Федухин А.В., Пасько В.П. Моделирование надежности систем средствами пакета программ RELIABmod // Математические машины и системы. 2011. Т. 1. № 1. С. 176-182.
- Зеленцов В.А., Потрясаев С.А., Соколов Б.В. Сервис-ориентированный распределенный программный комплекс для оценивания и многокритериального анализа показателей надежности и живучести бортовой аппаратуры малых космических аппаратов: российский и белорусский сегменты // Вестник Самарского университета.
 Аэрокосмическая техника, технологии и машиностроение. 2017. Т. 16. № 4. С. 118-129.
Аэрокосмическая техника, технологии и машиностроение. 2017. Т. 16. № 4. С. 118-129. - Кирьянчиков В.А., Москвина Л.К. Методика и программное средство оценки надежности вычислительных систем с помощью структурных схем надежности // Известия СПбГТЭУ. 2017. № 8. С. 29-37.
- Савицкий Р.С. Автоматизация расчетов надежности структурных схем резервирования // Решетневские чтения. 2012. Т. 2. № 16. С. 638-639.
- Тюрин С.Ф., Громов О.А., Каменских А.Н. Программный комплекс исследования методов повышения надежности // Вестник ИЖГТУ им. М.Т. Калашникова. 2012. № 2. С. 153-156.
- Курицына В.В., Куринын Д.Н. Инструментальные средства Matlab Simulink в задачах экспертной оценки технологических систем по параметрам качества изготовления изделий точного машиностроения // Труды ГосНИТИ. 2016. Т. 124. № 1. С. 105-111.
- Пряничникова В.В., Кадыров Р.Р. Разработка программы по диагностике и расчету надежности автоматизированных систем // Вестник молодого ученого Уфимского государственного нефтяного технического университета.
 2016. № 1. С. 47-53.
2016. № 1. С. 47-53. - Нго Зюи До. Программное обеспечение для вычисления показателей надежности сложного оборудования // Известия Байкальского государственного университета. 2016. Т. 26. № 2. С. 322-325.
- Дьяконов В.П. Simulink: Самоучитель. М.: ДМК-Пресс, 2013. 784 с.
- Гультяев А. Визуальное моделирование в среде MATLAB: учебный курс. СПб: Питер, 2000. 432 с.
- Надежность и эффективность в технике: справочник: в 10 т. Проектный анализ надежности / под ред. В.И. Патрушева, А.И. Рембизы. М.: Машиностроение, 1988. Т. 5. 316 с.
Файлы:
- 6-Кривель.pdf (скачать | просмотреть) — скачано 79 раз
MATLAB-SIMULINK TUTORIAL для ECHE 550
Это учебник можно найти в Интернете по адресу:
http://opus.che.sc.edu/~gatzke/courses/tutorial.htm
1. От начала Меню в правом нижнем углу, запустите MATLAB.
2. Вы должны получить
следующее окно PC Matlab:
Вы должны получить
следующее окно PC Matlab:
3.
По команде
в командном окне введите следующую команду:
>> Simulink
4. Из файла меню выберите New, затем Model
5. В окне Simulink Library Browser щелкните (или дважды щелкните) на Источники.
6. Снизу из списка блоков выберите «Шаг» и перетащите шаг в пустую область. окно симуляции.
7. В окне Simulink Library Browser щелкните (или дважды щелкните) на Раковины.
8. Выберите область блок и перетащите его в безымянный Simulink окно симуляции.
9.
Выберите стрелку
выходит из блока Step и соединяется со стрелкой, идущей в прицел
блокировать.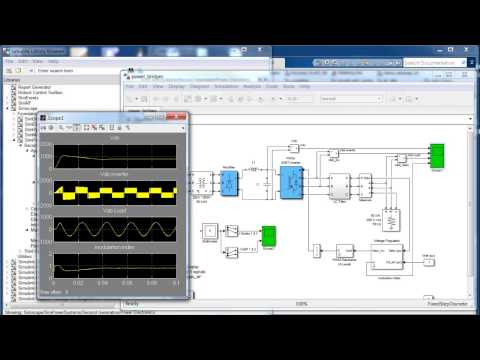
10. Дважды щелкните блок Scope, чтобы открыть область видимости window:
в окне симуляции нажмите кнопку воспроизведения (вверху, вторая справа). Обратите внимание, что вы также можете выбрать Симуляция->Начать с помощью меню окна симуляции. Вы должны увидеть следующее в своей области окно:
12. В безымянном окне моделирования дважды щелкните ступенчатый блок. Изменить конечное значение до 10 и снова запустите симуляцию. Ваш прицел должен выглядеть так:
13. Нажмите кнопку бинокля, и оси изменить масштаб:
14. В окне моделирования без названия дважды щелкните значок блок шага и измените время шага на 15, затем запустите симуляцию. Ваш объем должен выглядеть так:
15. Вы недостаточно далеко запустили моделирование
время. В безымянном окне симуляции
выберите в меню «Моделирование» «Параметры моделирования». Измените время остановки на 20.
Вы недостаточно далеко запустили моделирование
время. В безымянном окне симуляции
выберите в меню «Моделирование» «Параметры моделирования». Измените время остановки на 20.
16. Запустите симуляцию, нажмите кнопку бинокля, и ваш область видимости должна выглядеть так:
17. Чтобы заблокировать значение этой оси (чтобы не нажимать кнопку бинокль каждый раз, нажимайте кнопку справа от кнопки бинокля.
18. Теперь вы должны сохранить симуляцию без названия. В меню «Файл» в безымянном окно симуляции, выберите Сохранить. Ты может сохранить ваш файл на диске Z (H:), чтобы он будет доступен с любого из инженерных ПК.
19. Теперь мы немного изменим симуляцию. Выберите соединение между ступенчатым блоком и область действия в окне моделирования и нажмите «Удалить»:
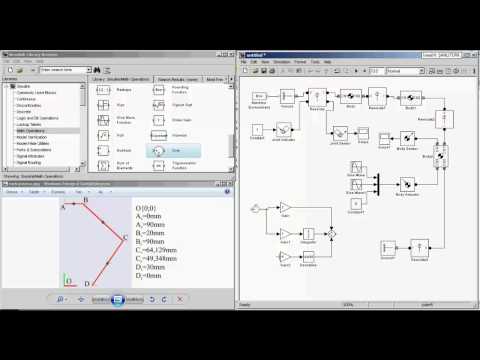
20. В библиотеке Simulink
Window, щелкните Math и выберите блок Gain:
В библиотеке Simulink
Window, щелкните Math и выберите блок Gain:
21. Перетащите Gain в окно симуляции и подключите моделирование следующим образом:
22. Дважды щелкните блок усиления в моделировании. окно и измените значение усиления от 1 до 20. Запустите симуляцию, затем нажмите бинокль Кнопка в окне прицела:
23. Нам нужно пометить нашу симуляцию. Вы можете дважды щелкнуть на фоне вашей симуляции ввести текст:
24. Вы также можете редактировать текст для каждого блока, чтобы симуляция более наглядная.
25. Мы хотели бы посмотреть на входной сигнал и
выходной сигнал. Нажмите на блок Scope
в вашей симуляции, затем выберите копирование (Edit Menu-> Copy или Control-C или Copy
кнопка). Нажмите «Вставить» (меню «Правка» ->
Вставить или Control-V или кнопку Вставить).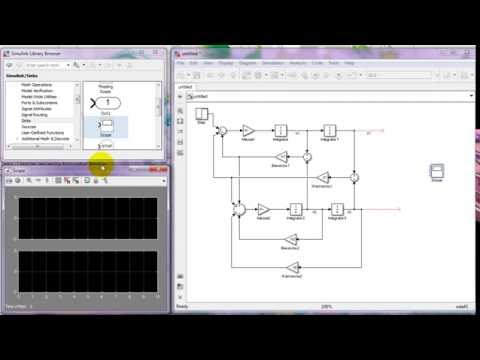
26. В новой области выберите стрелку ввода и перетащите линия для подключения к сигналу между шагом и усилением. Когда вы правильно выстроены, перекрестие переключается с одинарного на двойное, затем отпускает мышь.
27. Теперь откройте обе области, запустите симуляцию и нажмите кнопку бинокулярные кнопки на каждом прицеле:
оси в одном прицеле. Выберите выход окно прицела и нажмите вторую кнопку слева, кнопку Параметры. Измените количество осей с 1 на 2 и нажмите ok:
29. Удалите область ввода, затем измените симуляцию. чтобы входной сигнал и выходной сигнал подавались в осциллограф:
30. Запустите моделирование.
31. Измените имя в блоке области действия в окне Simulink, чтобы однозначно идентифицировать себя.
32. Создайте новую пустую симуляцию. Вам понадобится
а. шаг (от Источники)
б. сфера (от Раковины)
c. сумма блока (из Математика)
д. блок усиления (из математики)
e. перевод функциональный блок (от непрерывного)
f. блок мультиплексирования (из маршрутизации сигнала). Окно моделирования должно выглядеть так:
33. Дважды щелкните блок Sum и измените значение от |++ до |+- .
34. Теперь вы создадите свой первый отзыв. система контроля. Передаточная функция представляет собой простую линейную динамическую систему, связывающую вход процесса u(t) с выходом процесса y(t). Блок усиления представляет собой простой контроллер. Шаг – это изменение ysp(t). Суммарный блок вычисляет ошибку между ysp(t) и y(t). Соединять ваши блоки следующим образом:
35. Запустите симуляцию и посмотрите на ответ. Вы должны увидеть ответ, который начинается с
нуля и начинает постепенно изменяться в сторону 0,5 в момент времени t=1,0.
Запустите симуляцию и посмотрите на ответ. Вы должны увидеть ответ, который начинается с
нуля и начинает постепенно изменяться в сторону 0,5 в момент времени t=1,0.
36. Теперь измените блок области видимости, чтобы принять два входных сигналы. Соедините свои блоки в следующим образом:
37. Измените имя блока прицела, чтобы идентифицировать себя, когда вы распечатываете его.
38. Выберите в окне симуляции Format -> Wide Нескалярные линии. Также выберите Формат -> Показать ширину портов. Simulink может принимать векторные значения для некоторых блоков. Ваш окно симуляции должно выглядеть так:
39. Запустите симуляцию и распечатайте свой ответ для сдачи. Верхний график показывает уставку и измерение процесса на одном графике. Нижний график показывает ход ввода рассчитывается простой системой управления.
40. Теперь добавьте блок часов из Sources и To
Блок рабочей зоны от раковин. Нажмите на
блок To Workspace и измените шаг расчета на 0,1, выберите формат сохранения
как массив и измените имя переменной на t.
41. Скопируйте/вставьте блок To Workspace три раза и измените имена переменных на y ysp и ты.
42. Соедините блоки следующим образом:
43. Запустите симуляцию. В окне Matlab введите whos. Вам следует см. что-то вроде:
>> whos
Имя Размер Байты Класс
t 101×1 808 двойной массив
tout 103×1 824 двойной массив
u 101×1 808 двойной массив
1y 81012x двойной массив0004исп 101×1 808 двойной массив
Всего 507 элементов, используя 4056 байт
>>
44. Введите edit в matlab моделирование. Окно редактора должно появляться.
45. Введите следующие команды. ‘)
ylabel(‘y value’)
title(‘Plot МОЕ ИМЯ’)
оси([0 10 0 1.2])
subplot(2,1,2)
plot(t,u)
ylabel(‘u value’)
xlabel(‘YouTime’)
4 4 4 скопируйте / вставьте эти команды в командную строку Matlab, чтобы построить график. Вы также можете выделить команды, а затем вправо
щелкните, чтобы оценить их в окне Matlab.
Вы также можете выделить команды, а затем вправо
щелкните, чтобы оценить их в окне Matlab.
47. Обратите внимание, что вы можете сохранить эти команды в файл. Сохраните эти команды построения графика в файл: makeplots.m на диске Z (H:). Вы можете повторно использовать эти команды позже, чтобы сделать новые графики, точно так же, как вы можете повторно использовать симуляцию для сделать новые системы управления. Распечатайте свой График для выключения.
49. Выберите Подключить сетевой диск
50. В поле Папка введите следующее: \\129.252.25.35\pcm и нажмите клавишу возврата. Это монтирует сетевую папку на ваш локальный ПК, предоставляя вам доступ к файлы PCM Matlab. Должно появиться следующее окно:
51. Обратите внимание на букву диска. В этом случае диск отображается как E:
52. Закройте окно и запустите MATLAB.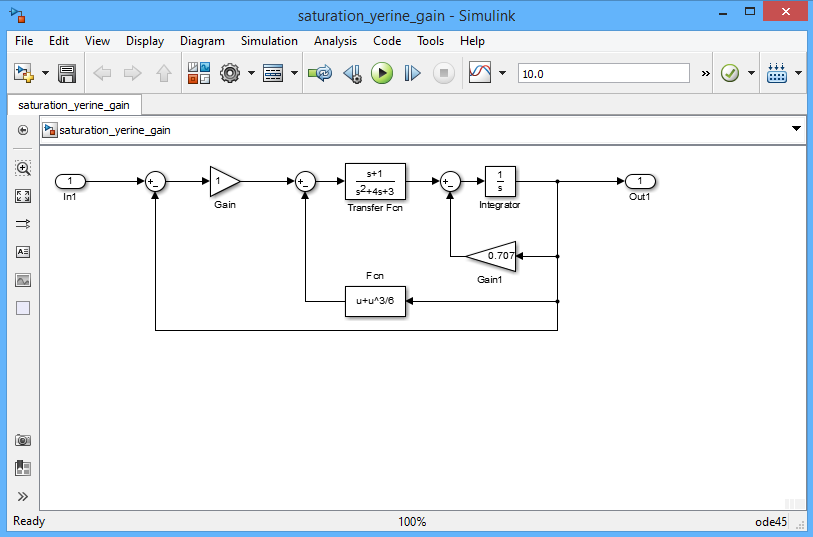
53. Вы должны получить следующий компьютер Matlab окно:
54. В командной строке в командном окне введите
следующее:
>> компакт-диск e:
(e: буква сопоставленного диска.)
55. В командной строке в командном окне введите
следующее для запуска модулей управления технологическим процессом:
>> главное меню
56. С помощью кнопок главного меню экран, нажмите кнопку печи:
57. В меню печи выберите Печь, чтобы запустить имитация открытого цикла:
Окно и окно имитации печи. Попробуйте быстро переключаться между двумя окнами с помощью процесса Кнопка «Монитор» в окне печи и кнопка «Окно моделирования» в Окно монитора процесса печи.
59. Чтобы начать моделирование, в окне печи нажмите
кнопка воспроизведения вверху, вторая справа:
Чтобы начать моделирование, в окне печи нажмите
кнопка воспроизведения вверху, вторая справа:
60. Кроме того, вы можете выбрать меню вариант запуска. Альтернативно, вы можете нажать Control-t, чтобы начать симуляцию.
61. Должна начаться имитация обогреваемая трубчатая печь:
Кнопка «Скорость потока» в левом нижнем углу симуляции.
63. Измените значение с 1,21 на 1,31 и нажмите ОК, затем быстро дважды щелкните кнопку Process Monitor в левом верхнем углу. угол окна топки. Вам следует увидеть динамическое изменение в измерениях процесса.
64. Попробуйте внести другие небольшие изменения в параметры и изучить изменения в размерах печи.
65. Распечатайте копию Process Monitor вместе с
имя на нем, которое показывает по крайней мере один динамический переходный процесс в системе печи. 66. Закройте все окна PCM.
66. Закройте все окна PCM.
67. По команде Matlab
подсказка, тип:
>> dee
Появится следующее окно.
68. Дважды щелкните файл deedemo1. Это загружает Ван дер
Демонстрация уравнения Пола.
Ван дер Поль
уравнение представляет собой нелинейное ОДУ второго порядка вида:
Как и все ОДУ более высокого порядка, его можно разложить
в систему ОДУ первого порядка. Когда m велико (~ 1000),
система становится жесткой, поэтому это уравнение становится хорошей системой для проверки
жесткие решающие возможности интегратора.
69. Дважды щелкните значок vdp.
блокировать. Это приводит к дифференциалу
окно редактора уравнений:
70. Для правильного изучения этой системы необходимо
изменить некоторые свойства по умолчанию.
Демонстрация выполнила большую часть работы по разложению второго порядка.
систему на две системы первого порядка, но m было неявно оставлено
как 1. Чтобы добавить регулируемое m, умножьте первый член в первом dx/dt=
уравнение по мю. Кроме того, интересующий выход (y) на самом деле равен x, а не dx/dt, поэтому измените выходное уравнение в y= на x(2). Проверьте свои
поработайте с рисунком ниже, чтобы убедиться, что он правильный. Нажмите Готово, когда закончите.
Кроме того, интересующий выход (y) на самом деле равен x, а не dx/dt, поэтому измените выходное уравнение в y= на x(2). Проверьте свои
поработайте с рисунком ниже, чтобы убедиться, что он правильный. Нажмите Готово, когда закончите.
71. В командном окне введите:
>> мю = 1;
Это сообщает редактору дифференциальных уравнений, какое значение использовать для mu.
72. Также необходимо изменить некоторые значения по умолчанию
графические свойства. Выберите область
окно, которое было открыто при открытии демо:
Нажмите кнопку Параметры. (К
справа от принтера.) Это вызывает
Окно параметров:
Выберите вкладку История данных и снимите флажок Ограничить точки данных последними:. Нажмите «ОК», когда закончите.
73. Теперь из меню Simulation листа deedemo1,
выберите параметр Параметры моделирования.
Измените время остановки на 20. Нажмите
Хорошо, когда вы закончите.
74. Снова в меню Simulation выберите Start. Вы должны увидеть решение, нанесенное на
сфера. Этот нежесткий случай завершает
быстро.
Вы должны увидеть решение, нанесенное на
сфера. Этот нежесткий случай завершает
быстро.
75. Теперь пришло время проверить систему, когда
уравнения жесткие. В команде
окно, тип:
>> мю = 1000;
В окне параметров области выберите вкладку Общие и установите TimeRange на 3000.
Нажмите «ОК», когда закончите.
В окне deedemo1 выберите окно Simulation и Simulation
Параметры. Измените время остановки на 3000.
76. Запустите симуляцию еще раз, используя меню симуляции.
и вариант «Пуск». Вы увидите
объем прогрессирует очень медленно. Если вы сделаете
не хотите ждать, вы можете остановить симуляцию до ее завершения. (Убедитесь, что вы работаете как минимум до t = 1000.)
77. Низкая производительность возникла из-за того, что решатель Simulinks по умолчанию не обрабатывает жесткие системы.
очень хорошо. Если вы знаете, что работаете
с жесткой системой вы можете изменить решатель Matlabs
к тому, который предназначен для обработки этого. В
меню Simulation выберите пункт Simulation Parameters. В разделе «Параметры решателя» измените ode45 на
ода23с. Нажмите «ОК», когда вы
законченный.
В
меню Simulation выберите пункт Simulation Parameters. В разделе «Параметры решателя» измените ode45 на
ода23с. Нажмите «ОК», когда вы
законченный.
78. Запустите симуляцию еще раз (Моделирование ->
Начинать). Вы должны увидеть в области
что он завершает симуляцию почти мгновенно.
79. Как вы только что видели, дифференциальное уравнение Редактор — это простой способ добавить системы ОДУ к рабочему листу Simulink. Позволяет легко изменять различные параметры системы и наблюдать как меняется выход. Не стесняйтесь поэкспериментируйте с системой Ван дер Поля или любым другим редактором дифференциальных уравнений. демо.
Simulink Tutorial Series — 10 » TheCloudStrap
Simulink Tutorial Series — 10В этой статье я собираюсь объяснить вам, как спроектировать функцию ограничения в Simulink.
Я буду строить модели Simulink для функции ограничения шаг за шагом.
Matlab/Simulink — ведущее программное обеспечение для разработки моделей в аэрокосмической, автомобильной промышленности и т. д.
д.
Существует несколько других онлайн-ресурсов, где вы можете получить теоретические знания о Matlab/Simulink. На самом деле у Matlab есть очень хорошая документация для каждого из своих продуктов. Но не так много ресурсов для объяснения теории вместе с хорошими рабочими примерами. Это будет серия статей. это 10 -я -я статья в этой серии.
В каждой статье этой серии учебных пособий по Simulink я добавляю реальные рабочие примеры и показываю, как создавать модели для конкретной задачи.
Постановка задачиВот постановка задачи –
Разработайте функцию ограничения в Simulink так, чтобы –
1. Выход был равен входному значению, когда входное значение находится между низким и высоким значениями
2. Выход устанавливается на Низкое значение, когда вход ниже Низкого
3. Выходное значение устанавливается на Высокое, когда входное значение выше Высокого
Примечание. Это также популярный вопрос интервью для Matlab/Simulink.
Это также популярный вопрос интервью для Matlab/Simulink.
Я полагаю, вы уже ознакомились с моими предыдущими статьями.
В одной из этих статей я объяснил блок задержки в библиотеке Simulink. Понимание блока задержки имеет решающее значение для реализации обратного счетчика в Simulink.
Разработайте функцию ограничения в Simulink
Для разработки функции предела мне нужны следующие блоки библиотеки:
- Блок переключателей
- Блок реляционных операторов
- Блок констант
- Блок отображения
Если вы прочитали мои предыдущие сообщения, вы уже знаете, как найдите эти блоки в браузере библиотеки Simulink.
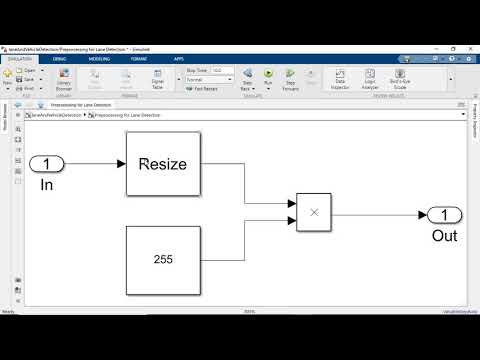
Теперь я просто возьму эти блоки из браузера библиотеки Simulink и положу их в пустую модель/холст Simulink.
Я соединю их соответствующим образом, чтобы реализовать функцию Limit. Как вы можете видеть ниже, я использовал блоки реляционных операторов. Один из них — проверить, превышает ли входное значение значение High.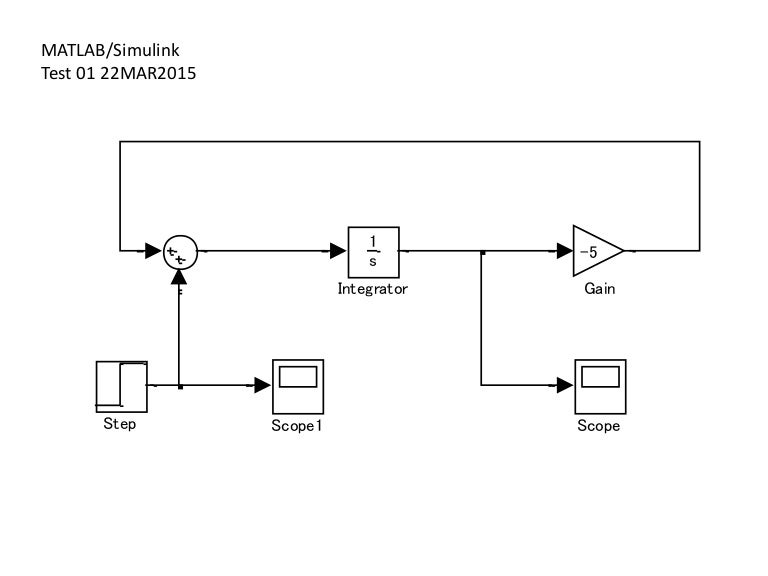 Другой используется для проверки того, меньше ли входное значение нижнего значения. Выход реляционных блоков служит управляющим входом для соответствующих блоков переключения.
Другой используется для проверки того, меньше ли входное значение нижнего значения. Выход реляционных блоков служит управляющим входом для соответствующих блоков переключения.
Если выход блока реляционного оператора имеет значение True, блок switch передаст первый вход как выход. Если оно равно False, блок переключателей будет передавать третий вход как выход.
Второй вход блока переключателей действует как вход управления.
Вывод модели
Теперь я запущу модель, нажав зеленую кнопку воспроизведения.
Как вы можете видеть ниже, вывод ограничен диапазоном – <20 до 80>. Входной вектор = [10 20 30 40 50 60 70 80 90].
Верхнее значение равно 80, а нижнее значение равно 20. Таким образом, если входное значение выше или равно высокому значению, будет выведено высокое значение. Если входное значение меньше или равно нижнему значению, будет выведено низкое значение.
В этом случае, если вы видите, что первый вход, т. е. 10, меньше нижнего значения, т.