Матрица камеры видеонаблюдения: принцип работы, параметры выбора
О чем идет речь? Матрица камеры – главный элемент изображения в этом сложном устройстве. Преобразует свет, попадающий на светочувствительные кристаллы в цифровой видеопоток. Может отличаться размерами, разрешением, технологией изготовления.
Как выбрать матрицу? В подавляющем большинстве случаев в современных камерах устанавливаются CMOS-матрицы. Они «быстрее», дешевле и больше подходят для специфики видеонаблюдения. О других важных параметрах выбора читайте в нашем материале.
Оглавление:
- Принцип работы матрицы камеры видеонаблюдения
- Производители матриц
- Типы матриц камер видеонаблюдения
- Размер матрицы
- Светочувствительность матрицы
- 5 параметров выбора матрицы камеры видеонаблюдения
Принцип работы матрицы камеры видеонаблюдения
Матрица камеры (светочувствительный сенсор) — это интегральная схема из фотодиодов, представляющая собой важнейшую деталь устройства видеонаблюдения. Главная функция этой детали заключается в том, что она преобразовывает оптическое изображение в аналоговый электрический сигнал или поток цифровой информации.
Главная функция этой детали заключается в том, что она преобразовывает оптическое изображение в аналоговый электрический сигнал или поток цифровой информации.
Качество изображения определяется матрицей устройства. Дело в том, что процессор (ещё один элемент камеры) лишь оцифровывает полученное изображение. Поэтому, если качество поступившей в него информации оказалось низким, то и конечный результат будет соответствующим.
На данный момент можно найти большое количество одинаковых по техническим параметрам камер с различными видами матриц. Следовательно, при использовании, на первый взгляд, двух однотипных устройств вы получите совершенно разное качество картинки. При этом стоимость таких камер, как правило, выше. Разница в цене нередко доходит до 35 %.
Производители матриц
Широкое распространение получили такие производители как: ON Semiconductor Corporation, Omnivision Technologies Inc., Samsung Electronics и Sony Corporation. Эти комплектующие применяются для изготовления большинства современных видеокамер и камер премиум класса.
10 шагов, которые помогут выбрать добросовестного подрядчика
Поможет сохранить бюджет и уложиться в сроки проекта
pdf 3,7mb
Уже скачали 11 507
Однако есть и другие фирмы, которые поставляют более дешевую продукцию. Яркий пример – SOI (Silicon Optronics, Inc.), не так давно вышедшая на рынок, но уже конкурирующая с крупными брендами. Данная схема используется многими производителями камер.
Таким образом, при выборе устройства нужно учитывать параметры матрицы, особенно если дело касается моделей со схожими характеристиками, но разной стоимостью. Популярные и надежные фирмы отличаются от неизвестных производителей именно по этому пункту. Чем лучше матрица, тем выше качество изображения. Кроме того, от неё зависит цвет и насыщенность итоговой картинки.
Типы матриц камер видеонаблюдения
В состав матрицы входят светочувствительные элементы, которые называют пикселями. Их размещают на полупроводниковой пластине. Каждый пиксель образует минимальный фрагмент изображения. Это достигается за счёт преобразования энергии светового потока в электрический заряд. После этого сигнал считывается. Используемая технология производства напрямую влияет на качество такой обработки. Есть два основных вида матриц камер:
Их размещают на полупроводниковой пластине. Каждый пиксель образует минимальный фрагмент изображения. Это достигается за счёт преобразования энергии светового потока в электрический заряд. После этого сигнал считывается. Используемая технология производства напрямую влияет на качество такой обработки. Есть два основных вида матриц камер:
CCD (ПЗС) схемы
Такими схемами оснащаются аналоговые видеокамеры. Работают они следующим образом: сигнал последовательно движется по ячейкам и конвертируется в электрический ток за пределами кристалла.
В результате все элементарные площадки используются при считывании светового потока, что обуславливает высокую чувствительность таких схем. На полупроводнике нет никаких активных элементов, поэтому камеры на базе CCD-матриц имеют низкий уровень собственных шумов.
Данная технология стала настоящим открытием для производителей камер видеонаблюдения. Благодаря цветной картинке изображение получалось более информативным и детализированным, чем в случае с черно-белыми вариантами. Однако первые модели не могли похвастаться высокой чувствительностью. Из-за этого они были менее эффективны при установке в местах с плохим освещением. Низкая цветопередача приводила к отображению «шума» на итоговой картинке
Однако первые модели не могли похвастаться высокой чувствительностью. Из-за этого они были менее эффективны при установке в местах с плохим освещением. Низкая цветопередача приводила к отображению «шума» на итоговой картинке
Чтобы нивелировать данный недостаток производители внедрили технологию «день/ночь». Почти все современные камеры от крупных брендов обладают такой функцией. Однако далеко не каждое устройство способно выдавать качественное изображение при плохом освещении, даже с помощью «день/ночь».
Бытовало мнение, что CCD схемы гораздо лучше CMOS-матриц по всем пунктам. Но на данный момент это совсем не так. Модели на базе CMOS сейчас находятся на одном уровне с CCD устройствами. Почти все современные камеры видеонаблюдения оснащаются такими схемами.
CMOS (КМОП) матрицы камеры
Данный подход дает возможность выполнять преобразование сигнала в электрический заряд на самом пикселе. Следовательно, обработка осуществляется сразу с нужного элемента. Благодаря этому устройство почти сразу образовывает цифровой сигнал.
Практика показала, что CMOS-матрицы являются оптимальным вариантом для цифровых (ip) камер видеонаблюдения.
Но принцип работы таких схем обуславливает необходимость установки на каждый пиксель различных электронных деталей (транзисторы, конденсаторы, резисторы). Это снижает полезную площадь, что приводит к потере чувствительности матрицы камеры.
Однако современные технологии производства позволили расширить светочувствительную зону на 30 % (APS технологии) и даже на 70 % (ACS).
Размер матрицы
Значение этого показателя отражает размер диагонали матрицы в дюймах. Записывается в виде дроби (1/3″, 1/2″, 1/4″ и так далее).
Многие думают, что габариты матрицы напрямую влияют на качество изображения и угол обзора. Но это ошибочное мнение, так как параметры итоговой картинки зависят от размеров отдельной ячейки или пикселя (чем крупнее, тем лучше). Так что будьте внимательны. Следует обращать внимание на размер матрицы камеры видеонаблюдения вместе с количеством пикселей.
Допустим, вы выбираете между двумя камерами, в одной из которых стоит матрица 1/3″, а в другой — 1/4″, при этом они никак не отличаются по количеству пикселей. Первый вариант обеспечит более высокое качество картинки. Но если пикселей больше, то придётся высчитывать приблизительный размер отдельного элемента (пикселя).
Исходя из нижеприведенной таблицы, становится очевидным, что размер пикселя на матрице камеры 1/4″ может быть более крупным, в сравнении с матрицей 1/3″. Следовательно, такая картинка будет лучше.
Размер матрицы | Количество пикселей (млн) | Размер ячейки (мкм) |
1/6 | 0.8 | 2,30 |
1/3 | 3,1 | 2,35 |
1/3,4 | 2,2 | 2,30 |
1/3,6 | 2,1 | 2,40 |
1/3,4 | 2,23 | 2,45 |
1/4 | 1,55 | 2,50 |
1 / 4,7 | 1,07 | 2,50 |
1/4 | 1,33 | 2,70 |
1/4 | 1,2 | 2,80 |
1/6 | 0,54 | 2,84 |
1 / 3,6 | 1,33 | 3,00 |
1/3,8 | 1,02 | 3,30 |
1/4 | 0,8 | 3,50 |
1/4 | 0,45 | 4,60 |
Светочувствительность матрицы
Этот параметр, который иногда называют чувствительностью матрицы, говорит о потенциале функционирования устройства при разной освещенности.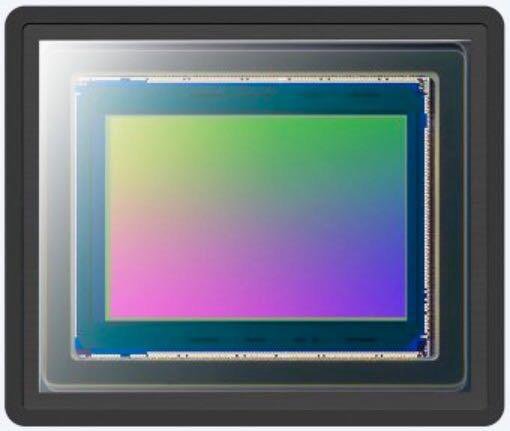 Чем меньшее количество световой энергии требуется для отображения приемлемой картинки, тем больше и чувствительность.
Чем меньшее количество световой энергии требуется для отображения приемлемой картинки, тем больше и чувствительность.
Обратите на это внимание при выборе камеры. Для любой схемы применимо одно простое правило: чем лучше освещена зона наблюдения, тем качественнее будет картинка. Единица измерения освещенности — люкс (ЛК, Lux, люкс). Однако здесь есть один нюанс: в технических характеристиках устройства указывается наименьший уровень освещенности, при котором камера будет отображать картинку. Следовательно, это ещё не означает, что изображение будет высококачественным.
При этом, как уже ранее упоминалось, почти все современные видеокамеры обладают функцией «день / ночь» и ИК-подсветкой. Благодаря этому в условиях плохой освещенности устройство будет функционировать в чёрно-белом режиме.
Стандартная ИК-подсветка может осуществлять видеофиксацию даже в абсолютной темноте. Дальность такой съемки нередко достигает 20-25 метров. Есть камеры с усовершенствованной подсветкой, которые выдают изображение на расстоянии 60-100 метров при отсутствующем освещении.
Из всего вышесказанного следует, что показатель светочувствительности имеет большое значение только для устройств, в которых не предусмотрена функция ИК-подсветки. Но такие камеры на данный момент встречаются очень редко. Без режима подсветки производятся лишь специальные миниатюрные цилиндрические или корпусные устройства.
Есть несколько стандартных вариантов светочувствительности: «Безлунная ночь» (0,01 Lux), «Лунная ночь» (0,05 Lux), «Сумерки и хорошо освещенная автомагистраль ночью» (10 Lux), «Дневное, естественное освещение на улице в солнечную погоду» (5000-100000 Lux).
Нельзя не отметить технологии производства, которые позволяют повысить чувствительность матрицы и уменьшить световые потери при съёмке. Обычно с этой целью светочувствительная деталь устанавливается рядом с микролинзой, улавливающей свет. Эти способы производства получили название «Exmor» и «Starlight».
Данные матрицы камер видеонаблюдения позволяют выполнять цветную съёмку даже при освещенности в 0,01 Lux, а при 0,0001-0,001 Lux они могут отображать менее качественное, но все же приемлемое изображение. Однако стоимость таких устройств, конечно же, выше. «Exmor» и «Starlight» нередко применяются в процессе изготовления роботизированных камер.
Однако стоимость таких устройств, конечно же, выше. «Exmor» и «Starlight» нередко применяются в процессе изготовления роботизированных камер.
К примеру, устройств, выполняющих видеофиксацию на крупных территориях, или для системы «Умный город». Если же камера будет устанавливаться на стандартной территории, то улучшение освещения станет более экономным вариантом, нежели покупка продвинутого устройства.
5 параметров выбора матрицы камеры видеонаблюдения
При выборе не нужно ориентироваться лишь на дорогие и популярные бренды. Самое главное обратить внимание на несколько основных характеристик матриц камер:
- Развертка. Это тип передачи сигнала. Хорошие видеокамеры выпускаются только с прогрессивной развёрткой.
- Разрешение матрицы камеры. Данный параметр определяет число пикселей на размер схемы. Если схема обладает высоким разрешением, то картинка будет детализированной и информативной.
- Формат. Крупногабаритная матрица сможет улавливать больше света.
 Следовательно, такое устройство сможет осуществлять видеофиксацию даже при плохом освещении.
Следовательно, такое устройство сможет осуществлять видеофиксацию даже при плохом освещении. - Соотношение сторон кадра и матрицы. Самый часто встречающийся и при этом удобный показатель — 16:9.
- «Коридорная» съемка. Данная функция применяется для съемки узких территорий. В этом случае объектив камеры можно повернуть на 90 градусов.
Итак, какая же матрица камеры лучше? Для ответа на этот вопрос нужно определиться с целями установки устройства и теми условиями, в которых оно будет применяться. Кроме того, параметры камер следует оценивать в совокупности, а не по отдельности. Стоимость — ещё один немаловажный критерий выбора. Учитывая все эти нюансы, вы сможете приобрести оптимальный вариант.
Типы и размеры матриц камер видеонаблюдения
Светочувствительная матрица — важнейший элемент видеокамеры, который обеспечивает качество изображения на 90%. Представляет собой интегральную микросхему, состоящую из фотодиодов. Сенсор генерирует видеопоток, преобразуя проецируемое в него оптическое изображение в аналоговые электрические импульсы. В сетевых видеокамерах эти импульсы сразу преобразовываются в цифровой поток данных за счет наличия в системе АЦП, сразу обрабатывающего сигнал.
В сетевых видеокамерах эти импульсы сразу преобразовываются в цифровой поток данных за счет наличия в системе АЦП, сразу обрабатывающего сигнал.
Сенсоры имеют ряд характеристик, важнейшие из которых — вид, разрешение и размер матрицы камеры видеонаблюдения. От этих параметров зависит быстродействие устройства, уровень его энергозатратности, а также конечное качество воспроизводимого камерой видео.
- CCD (ПЗС). Характеризуются лучшей светочувствительностью, обеспечивают хорошую цветопередачу и низкий уровень шума на изображении. Это достигается за счет последовательного считывания зарядов в каждой ячейке сенсора. Однако принцип действия таких матриц слишком медленный и не удовлетворяет современное видеонаблюдение с большими разрешениями и высокой кадровой частотой. Кроме того, такие сенсоры энергозатратны, дороже в производстве и сложнее в эксплуатации. В современных цифровых камерах важно какая матрица используется. Поэтому, чтобы не тормозить процесс передачи видеопотока, технологию CCD практически не применяют;
- Live-MOS.
 Разработка компании Panasonic. Применяется для трансляций «живого» изображения за счет технологии, которая позволяет упрощенно организовать передачу сигналов управления и преобразование света в электрические импульсы. Для технологии характерно меньшее напряжение электропитания, перегрев и уровень шумовых помех;
Разработка компании Panasonic. Применяется для трансляций «живого» изображения за счет технологии, которая позволяет упрощенно организовать передачу сигналов управления и преобразование света в электрические импульсы. Для технологии характерно меньшее напряжение электропитания, перегрев и уровень шумовых помех; - CMOS (КМОП). Главное достоинство — более низкое энергопотребление. Ячейки в сенсоре считываются в произвольном порядке, что позволяет избежать размытия изображения при съемке движущихся объектов. Камерой с типом матрицы CMOS гораздо проще управлять, поскольку большая часть электроники расположена на ячейке. Однако такая конструкция сенсора уменьшает светочувствительную площадь.
Для современного видеонаблюдения в соотношении быстродействия, энергопотребления и цены КМОП матрицы предпочтительнее. Поэтому крупнейшие производители камер сосредоточились на закупке или производстве собственных CMOS сенсоров. Например, компании Hikvision и Dahua разрабатывают собственные светочувствительные элементы, которые использует при производстве оборудования.
ПЗС или КМОП матрица?
Размеры матриц видеокамер наблюдения
Физические размеры матриц выражаются условной длиной, приведенной к диагонали видикона.
Современные видеокамеры чаще всего используют следующие типоразмеры: 1/2”; 1/3”; 1/4”; 1/6” и реже 1/10”.
Какой размер матрицы лучше для видеокамеры
Это зависит от конкретных задач, стоящих перед видеонаблюдением. Важно помнить, что при выборе устройства характеристики нужно рассматривать комплексно. Например, хорошее разрешение при маленьком размере сенсора дадут плохое изображение. Кроме того, чем больше матрица, тем она дороже. Поэтому при выборе видеокамеры необходимо рассматривать вариант, в котором будут учитываться оптимальное соотношение трех показателей, удовлетворяющих потребности видеонаблюдения — это цена, разрешение и типоразмер.
Хотите первыми узнавать о наших акциях и специальных предложениях? Подпишитесь на наши новости:
Что такое внутренние и внешние параметры камеры в компьютерном зрении? | by Aqeel Anwar
Photo by ShareGrid on UnsplashПодробное объяснение внутренних и внешних параметров камеры с помощью визуализаций
Изображения являются одними из наиболее часто используемых данных в последних моделях глубокого обучения. Камеры — это датчики, используемые для захвата изображений. Они берут точки мира и проецируют их на двумерную плоскость, которую мы видим как изображения. В этой статье мы рассмотрим полную трансформацию, которая происходит в этом процессе.
Это преобразование обычно делится на две части: Внешняя и Внутренняя. Внешние параметры камеры зависят от ее расположения и ориентации и не имеют ничего общего с ее внутренними параметрами, такими как фокусное расстояние, поле зрения и т. д. С другой стороны, внутренние параметры камеры зависят от того, как она захватывает изображения. Такие параметры, как фокусное расстояние, апертура, поле зрения, разрешение и т. д., определяют внутреннюю матрицу модели камеры.
Такие параметры, как фокусное расстояние, апертура, поле зрения, разрешение и т. д., определяют внутреннюю матрицу модели камеры.
Эти внешние и внешние параметры являются матрицами преобразования, которые преобразуют точки из одной системы координат в другую. Чтобы понять эти преобразования, нам сначала нужно понять, какие системы координат используются при построении изображений.
Image By AuthorОбычно используемые системы координат в Computer Vision:
- Мировая система координат (3D)
- Система координат камеры (3D)
- Система координат изображения (2D)
- Система координат пикселей (2D)
Внешняя матрица представляет собой матрицу преобразования из мировой системы координат в систему координат камеры, а внутренняя матрица является матрицей преобразования который преобразует точки из системы координат камеры в пиксельную систему координат.
Мировая система координат (3D):
[Xw, Yw, Zw]: Это трехмерная базовая декартова система координат с произвольным началом. Например, определенный угол комнаты. Точку в этой системе координат можно обозначить как Pw = (Xw, Yw, Zw).
Изображение АвторСистема координат объекта/камеры (3D):
[Xc, Yc, Zc]: Это система координат, которая измеряется относительно начала координат/ориентации объекта/камеры. Ось Z системы координат камеры обычно направлена наружу или внутрь объектива камеры (главная ось камеры), как показано на изображении выше (ось Z направлена внутрь объектива камеры). Можно перейти от мировой системы координат к системе координат объекта (и наоборот) с помощью операций вращения и перемещения.
Image By Author Матрица преобразования 4×4, которая преобразует точки из мировой системы координат в систему координат камеры, известна как внешняя матрица камеры . Внешняя матрица камеры изменяется, если изменяется физическое расположение/ориентация камеры (например, камера на движущемся автомобиле).
Система координат изображения (2D) [Модель пинхола]:
[Xi, Yi]: 2D система координат, в которой 3D точки в системе координат камеры спроецированы на 2D плоскость (обычно перпендикулярную ось z системы координат камеры — показана желтой плоскостью на рисунках ниже) камеры с моделью обскуры.
Image By Author Лучи проходят через центр отверстия камеры и проецируются на 2D-плоскость на другом конце. 2D-плоскость — это то, что камера захватывает в виде изображений. Это преобразование с потерями, что означает, что проецирование точек из системы координат камеры на 2D-плоскость не может быть обращено (информация о глубине теряется. Следовательно, глядя на изображение, снятое камерой, мы не можем определить фактическую глубину). из точек). Координаты X и Y точек проецируются на 2D-плоскость. 2D-плоскость находится в f (фокусное расстояние) расстояние от камеры. Проекции Xi, Yi можно найти по закону подобных треугольников (луч, входящий и выходящий из центра камеры, имеет одинаковый угол с осью x и y, альфа и бета соответственно).
Следовательно, в матричной форме у нас есть следующая матрица преобразования из системы координат камеры в систему координат изображения.
Изображение АвторЭто преобразование (от камеры к системе координат изображения) является первой частью внутренняя матрица камеры .
Пиксельная система координат (2D):
[u, v]: Представляет целочисленные значения путем дискретизации точек в системе координат изображения. Пиксельные координаты изображения — это дискретные значения в диапазоне, который можно получить, разделив координаты изображения на ширину и высоту пикселя (параметры камеры — единицы измерения: метр/пиксель).
Image By AuthorСистема координат пикселей имеет начало в левом верхнем углу, поэтому наряду с дискретизацией требуется оператор перевода (c_x, c_y).
Изображение Автора Полное преобразование из системы координат изображения в пиксельную систему координат может быть показано в матричной форме, как показано ниже. Ось X и Y не 90 градусов. В этом случае необходимо выполнить еще одно преобразование для перехода от прямоугольной плоскости к наклонной плоскости (перед выполнением преобразования из изображения в пиксельную систему координат). Если угол между осями x и y равен тета, то преобразование, которое переводит точки из идеальной прямоугольной плоскости в наклонную плоскость, можно найти, как показано ниже.0005 Изображение Автор
Ось X и Y не 90 градусов. В этом случае необходимо выполнить еще одно преобразование для перехода от прямоугольной плоскости к наклонной плоскости (перед выполнением преобразования из изображения в пиксельную систему координат). Если угол между осями x и y равен тета, то преобразование, которое переводит точки из идеальной прямоугольной плоскости в наклонную плоскость, можно найти, как показано ниже.0005 Изображение Автор
Эти две матрицы преобразования, то есть преобразование из прямоугольной системы координат изображения в систему координат перекошенного изображения и из системы координат перекошенного изображения в пиксельную систему координат, образуют вторую часть внутренней матрицы камеры .
Объединение трех матриц преобразования дает внешнюю матрицу камеры, как показано ниже0012 3D-3D проекция. Вращение, масштабирование, перемещение
 д.)
д.)Преобразует точки из мировой системы координат в систему координат камеры. Зависит от положения и ориентации камеры.
Внутренняя матрица камеры (камера-изображение, изображение-пиксель):Преобразует точки из системы координат камеры в пиксельную систему координат. Зависит от свойств камеры (таких как фокусное расстояние, размеры в пикселях, разрешение и т.д.)
image — Python — OpenCV: caulibateCamera возвращает матрицу камеры, но это бессмысленно
Я пытаюсь избавиться от барреля и других искажающих эффектов в изображения для применения конкретно к координатам. Я использую openCV с шахматной доской, мне удалось получить точные углы, однако, когда я применяю эти углы, я обнаруживаю, что они не возвращают то, что я ожидаю.
изображение: исходное изображение: калибровкаImage.bmp
импорт cv2
импортировать numpy как np
img = cv2.imread('CalibrationImage.bmp')
углы = массив([[[136.58304, 412.18762]],
[[200.73372, 424.21613]],
[[263.41006, 431.9114]],
[[334. , 437. ]],
[[405. , 436. ]],
[[470.78467, 428.75998]],
[[530.23724, 420.48328]],
[[152.61916, 358.20523]],
[[210.78505, 368.59222]],
[[270,52335, 371,8065]],
[[335,67096, 373,8901 ]],
[[400.88788, 373.57782]],
[[462.57724, 371.10867]],
[[517.49524, 366.26855]],
[[168.55394, 310.78973]],
[[228. , 321. ]],
[[277.43225, 319.48358]],
[[336,7225, 320,90256]],
[[396.0194, 321.13016]],
[[452.47888, 320.15744]],
[[503.7933 , 318.09518]],
[[183.49014, 270.53726]],
[[231,8806, 273,96835]],
[[283,5549, 275,63623]],
[[337.41528, 276.47876]],
[[391.28375, 276.99832]],
[[442. 8828 , 277.16376]],
[[490,67108, 276,5398 ]],
[[196.86388, 236.63716]],
[[241,56177, 238,3809]],
[[288,93515, 239,1635]],
[[337,9244, 239,63228]],
[[386.90695, 240.31389]],
[[434.21832, 241.17548]],
[[478.62744, 241.05113]],
[[208.81688, 208.1463]],
[[250.11485, 208.97067]],
[[293,5653, 208,92986]],
[[338.2928, 209.22559]],
[[382.94626, 209.92468]],
[[426.362, 211.03403]],
[[467.76523, 210.82764]],
[[219.20187, 184.123]],
[[257.52582, 184.09167]],
[[297,4925, 183,80571]],
[[338,5172 , 183,91574]],
[[379.46725, 184.64926]],
[[419.45697, 185.74242]],
[[457.93872, 185.08537]],
[[228.31578, 163.70671]],
[[263.87802, 163.11162]],
[[300,8062, 162,71281]],
[[338,686 , 162,79945]],
[[376.43716, 163.36848]],
[[413.39032, 164.23444]],
[[449.21677, 163.16547]]], dtype=float32)
ш, ч = 7, 8
objp = np.
8828 , 277.16376]],
[[490,67108, 276,5398 ]],
[[196.86388, 236.63716]],
[[241,56177, 238,3809]],
[[288,93515, 239,1635]],
[[337,9244, 239,63228]],
[[386.90695, 240.31389]],
[[434.21832, 241.17548]],
[[478.62744, 241.05113]],
[[208.81688, 208.1463]],
[[250.11485, 208.97067]],
[[293,5653, 208,92986]],
[[338.2928, 209.22559]],
[[382.94626, 209.92468]],
[[426.362, 211.03403]],
[[467.76523, 210.82764]],
[[219.20187, 184.123]],
[[257.52582, 184.09167]],
[[297,4925, 183,80571]],
[[338,5172 , 183,91574]],
[[379.46725, 184.64926]],
[[419.45697, 185.74242]],
[[457.93872, 185.08537]],
[[228.31578, 163.70671]],
[[263.87802, 163.11162]],
[[300,8062, 162,71281]],
[[338,686 , 162,79945]],
[[376.43716, 163.36848]],
[[413.39032, 164.23444]],
[[449.21677, 163.16547]]], dtype=float32)
ш, ч = 7, 8
objp = np.