Как понять размер матрицы фотоаппарата и почему это важно
Размер матрицы камеры может помочь вам предсказать качество изображения еще до того, как камера выйдет из коробки.
Датчик камеры – это часть камеры, которая фактически фиксирует изображение. Она играет большую роль в том, как выглядит полученное изображение.
Но что означает размер сенсора камеры? И почему он имеет значение?
В этом руководстве для начинающих вы поймете, когда вам нужен сенсор камеры большего размера, а когда нет.
Размер датчика камеры играет большую роль в качестве изображения. Изображение Александра Эндрюса.Размеры сенсоров фотокамер: объяснение
Датчик камеры подобен одной экспозиции пленки. Ее можно использовать снова и снова. Как фотопленка бывает разных размеров, так и цифровые камеры имеют разные размеры сенсора.
В цифровой камере сенсор подобен солнечной батарее, которая собирает свет для создания изображения. Более крупная матрица фотоаппарата собирает больше света, создавая в целом более качественное изображение.
Размеры матриц фотокамер стандартизированы. Это позволяет легко сравнивать размер матрицы в одной камере с размером матрицы в другой.
Есть некоторые различия, например, Canon APS-C меньше. Но эти различия достаточно незначительны, чтобы не оказывать заметного влияния на конечное изображение.
За исключением дорогих цифровых камер среднего формата, стандартные размеры матриц фотоаппаратов следующие:
- Полный кадр: Сенсор полнокадровый основан на размере 35-мм пленки, размером примерно 36 на 24 мм. Полнокадровые сенсоры используются в цифровых зеркальных и беззеркальных камерах профессионального уровня. Некоторые очень дорогие компактные камеры также оснащены ими.
- APS-C: Матрица APS-C уменьшает полнокадровое изображение примерно в 1,5 раза и имеет размеры 22 на 15 мм. Датчик такого размера используется в большинстве начального уровня и зеркальных фотокамер среднего уровня. Некоторые беззеркальные камеры, такие как Fujifilm, а иногда и компактные камеры высокого класса также имеют его.
- Micro Four Thirds: Сенсорная камера Micro Four Thirds появилась вместе с началом выпуска беззеркальных камер. Это было сделано для того, чтобы найти золотую середину между размером камеры и качеством изображения. Матрица Micro Four Thirds имеет 2-кратный кроп по сравнению с полнокадровой матрицей, ее размеры составляют 17,3 на 13 мм. В беззеркальных камерах Olympu используется сенсор Micro Four Thirds. Как и большинство беззеркальных камер Panasonic.
- Один дюйм: Разработанная для компактных камер, однодюймовая матрица имеет размеры примерно 13,2 на 8,8 мм, с уменьшением в 2,7 раза по сравнению с полнокадровой. Однодюймовый сенсор можно встретить в компактных камерах высокого класса. Она обеспечивает большее качество, чем компактная камера, но не такое высокое, как зеркальная камера или беззеркальная камера.
- Размеры сенсоров компактных камер и смартфонов: Датчики в типичных компактных камерах и смартфонах имеют больше различий.
 Все они малы по сравнению с размером полнокадрового сенсора. Сенсор размером 1/2,3 дюйма – один из самых популярных размеров, наряду с такими размерами, как 1/1,7 дюйма.
Все они малы по сравнению с размером полнокадрового сенсора. Сенсор размером 1/2,3 дюйма – один из самых популярных размеров, наряду с такими размерами, как 1/1,7 дюйма.
Камеры с матрицей меньше полнокадровой имеют так называемый кроп-фактор. Поскольку матрица камеры меньше, изображение получается кроп-фактором.
Полнокадровые матрицы обеспечивают самое высокое качество. Но есть несколько преимуществ в выборе камеры с меньшей матрицей.
Так в чем же плюсы и минусы большого сенсора по сравнению с маленьким?
Плюсы и минусы большого размера сенсора фотокамеры
Большие сенсоры камер имеют лучшее качество изображения
Размер матрицы фотокамеры – один из важнейших показателей качества изображения. Другие влияющие факторы – количество мегапикселей, конструкция матрицы камеры и процессор камеры.
Большие матрицы камер позволяют получать изображения с большей освещенностью, меньшим уровнем шума, большей детализацией и большим количеством красивого размытия фона, и это лишь некоторые моменты.
При сравнении двух камер, если у одной из них матрица больше, то качество изображения будет лучше.
Большие датчики камер собирают больше света
Одна из причин, по которой большие матрицы фотокамер означают лучшее изображение, связана со светом. Чем больше площадь поверхности матрицы, тем больше света она может собрать за один снимок.
По этой причине большие матрицы фотокамер отлично подходят для съемки при слабом освещении. Большая матрица камеры может собрать больше света даже при одинаковой выдержке и апертуре.
Поэтому они, как правило, лучше справляются с любым типом съемки, где освещение ограничено. Например, съемка ночного пейзажа или фотографирование театральной постановки, концерта или темного танцпола.
Большие сенсоры камер лучше справляются с высоким числом мегапикселей, с меньшим уровнем шума
Размер матрицы камеры и количество мегапикселей идут рука об руку. Но большее количество мегапикселей всегда лучше на большей матрице камеры, чем на меньшей.
У 50-мегапиксельного полнокадрового сенсора пикселей больше, чем у 50-мегапиксельного сенсора APS-C. У этих мегапикселей больше места на более крупном сенсоре.
Поэтому найти 50-мегапиксельный полнокадровый сенсор гораздо проще, чем 50-мегапиксельный сенсор APS-C.
Большее количество мегапикселей создает изображение более высокого разрешения с большим количеством деталей. Однако попытка уместить большое количество мегапикселей на маленьком сенсоре создает проблемы при съемке в условиях низкой освещенности. Эти пиксели настолько малы.
Маленький сенсор с 25 мегапикселями будет иметь больше шума или зерна при высоких ISO, чем полнокадровый сенсор с 25 мегапикселями.
Большие датчики камеры создают большее размытие фона
Вы когда-нибудь задумывались, почему вы не можете получить красивое мягкое размытие фона на своем смартфоне? Более крупные матрицы камер позволяют добиться такого мягкого фона. Это практически невозможно с меньшим сенсором.
Поэтому компании, производящие смартфоны, подделывают размытие фона с помощью искусственного интеллекта в портретном режиме. Сенсоры просто слишком малы для настоящего.
Сенсоры просто слишком малы для настоящего.
Если вы хотите получить мягкое размытие фона или узкую глубину резкости, вам нужна полнокадровая камера с широкоугольным объективом.
Большие размеры матриц фотокамер создают большее размытие фона различными способами. Больший размер матрицы увеличивает размытие фона за счет коэффициента увеличения.
Большие сенсоры не обрезают изображение. Фотографы также стремятся подойти ближе к объекту съемки, что также увеличивает размытие фона.
Маленькие сенсоры камер позволяют улучшить зум
Полнокадровые фотоаппараты могут быть лучшим выбором, когда речь идет о качестве изображения и размытии фона. Но если вы хотите подойти поближе, у меньшей матрицы есть несколько преимуществ.
Кроп-фактор матрицы камеры означает, что меньшие сенсоры позволяют легко подобраться к объекту съемки. Зум-объективы также меньше и дешевле, если они предназначены для камер с меньшей матрицей.
Например, матрица Micro Four Thirds имеет кроп-фактор 2x. Это означает, что объектив 300 мм на самом деле является объективом 600 мм.
Это означает, что объектив 300 мм на самом деле является объективом 600 мм.
Одно из самых больших преимуществ меньшей матрицы – это то, что ее легче приблизить. Не таская с собой огромный полнокадровый объектив 600 мм за 10 000 долларов.
Это важный момент для фотографов, которые не могут подойти ближе к объекту съемки. К ним относятся фотографы дикой природы и спортивные фотографы.
Меньшие датчики камер означают меньшие камеры в целом
Есть мнение, что если матрица камеры меньше, то, как правило, и вся камера будет меньше. Это верно не в 100 процентах случаев (как в случае с большой камерой Micro Four Thirds Olympus OM-D E-M1X).
Но чаще всего камеры с меньшей матрицей весят меньше и являются более компактными.
Если вам нужна хорошая камера для путешествий, камеру с меньшей матрицей, возможно, будет легче упаковать. Рост популярности беззеркальных камер несколько меняет ситуацию.
Сейчас найти компактную полнокадровую камеру легче, чем когда-либо.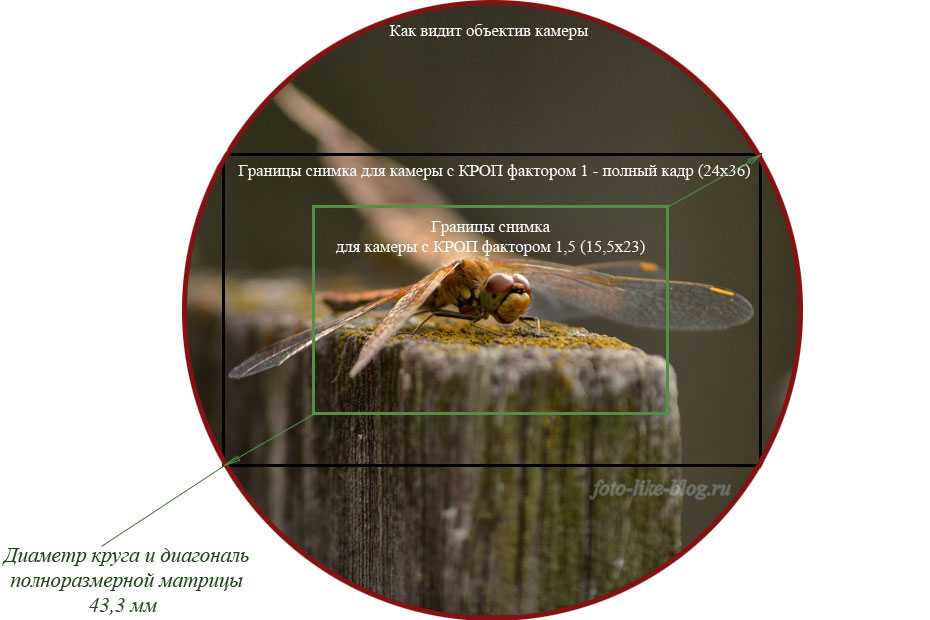 Но большинство беззеркальных камер Micro Four Thirds и APS-C все же более компактны.
Но большинство беззеркальных камер Micro Four Thirds и APS-C все же более компактны.
Большая причина того, что меньшие матрицы означают меньшие системы камер, заключается в том, что объективы меньше. Например, в систему Micro Four Thirds можно установить объектив 150 мм, чтобы получить охват большого объектива 300 мм.
Преимущество заключается в том, что при использовании самых больших телеобъективов широкоугольные объективы не дают большой разницы.
Маленькие датчики камер являются более бюджетными
Одна из самых больших причин отказаться от полного кадра? Стоимость. Большинство полнокадровых камер – это оборудование профессионального уровня.
Полные рамы начального уровня можно приобрести примерно за 1200-1500 долларов. Но многие из них стоят $2 000, $3 000 и даже выше.
Фотографы с ограниченным бюджетом могут получить большинство тех же преимуществ, выбрав матрицу среднего размера. Конечно, сенсор APS-C не так хорош, как полнокадровый сенсор. Но он намного превосходит смартфоны и компактные камеры.
Опции начального уровня можно приобрести за несколько сотен долларов, а не за несколько тысяч.
Некоторые камеры с меньшим сенсором могут включать в себя больше высококлассных функций, не перебарщивая с ценой.
Найти такие продвинутые функции, как видео 4K и внутрикорпусная стабилизация изображения по цене менее 1 500 долларов, зачастую проще в системе камер Micro Four Thirds.
Заключение
Размер матрицы фотокамеры является самым большим показателем качества изображения. Важно также отметить, что это не единственный показатель качества. Большее количество мегапикселей увеличивает детализацию (но также имеет тенденцию к снижению качества при низкой освещенности).
Датчик с подсветкой также лучше, чем датчик того же размера без подсветки. Процессор камеры или встроенный компьютер, обрабатывающий изображение, также играют роль в качестве изображения. Новые процессоры, как правило, дают меньше зернистости на изображении, чем старые.
Объектив также играет роль в качестве изображения. Независимо от того, закреплен ли объектив на камере или является сменным.
Независимо от того, закреплен ли объектив на камере или является сменным.
Большие матрицы камер позволяют получать более качественные изображения. Это особенно актуально при низком освещении, при большем размытии заднего плана и возможности установки большего количества мегапикселей.
Маленькие сенсоры камер, тем временем, предлагают большее увеличение, меньшие габаритные размеры камер и более низкие цены.
Так какой размер матрицы подходит именно вам? Если вы хотите получить максимальное размытие фона и наилучшее качество при низкой освещенности, выбирайте полнокадровую камеру.
Если вы хотите получить отличные фотографии при ограниченном бюджете, попробуйте камеру формата APS-C. А если вам нужна удобная для путешествий камера со сменным объективом или нужен серьезный зум, обратите внимание на матрицу Micro Four Thirds.
Новинки IT-индустрии, обзоры и тесты компьютеров и комплектующих
- ПК и комплектующие
- Настольные ПК и моноблоки
- Портативные ПК
- Серверы
- Материнские платы
- Корпуса
- Блоки питания
- Оперативная память
- Процессоры
- Графические адаптеры
- Жесткие диски и SSD
- Оптические приводы и носители
- Звуковые карты
- ТВ-тюнеры
- Контроллеры
- Системы охлаждения ПК
- Моддинг
- Аксессуары для ноутбуков
- Периферия
- Принтеры, сканеры, МФУ
- Мониторы и проекторы
- Устройства ввода
- Внешние накопители
- Акустические системы, гарнитуры, наушники
- ИБП
- Веб-камеры
- KVM-оборудование
- Цифровой дом
- Сетевые медиаплееры
- HTPC и мини-компьютеры
- ТВ и системы домашнего кинотеатра
- Технология DLNA
- Средства управления домашней техникой
- Гаджеты
- Планшеты
- Смартфоны
- Портативные накопители
- Электронные ридеры
- Портативные медиаплееры
- GPS-навигаторы и трекеры
- Носимые гаджеты
- Автомобильные информационно-развлекательные системы
- Зарядные устройства
- Аксессуары для мобильных устройств
- Фото и видео
- Цифровые фотоаппараты и оптика
- Видеокамеры
- Фотоаксессуары
- Обработка фотографий
- Монтаж видео
- Программы и утилиты
- Операционные системы
- Средства разработки
- Офисные программы
- Средства тестирования, мониторинга и диагностики
- Полезные утилиты
- Графические редакторы
- Средства 3D-моделирования
- Мир интернет
- Веб-браузеры
- Поисковые системы
- Социальные сети
- «Облачные» сервисы
- Сервисы для обмена сообщениями и конференц-связи
- Разработка веб-сайтов
- Мобильный интернет
- Полезные инструменты
- Безопасность
- Средства защиты от вредоносного ПО
- Средства управления доступом
- Защита данных
- Сети и телекоммуникации
- Проводные сети
- Беспроводные сети
- Сетевая инфраструктура
- Сотовая связь
- IP-телефония
- NAS-накопители
- Средства управления сетями
- Средства удаленного доступа
- Корпоративные решения
- Системная интеграция
- Проекты в области образования
- Электронный документооборот
- «Облачные» сервисы для бизнеса
- Технологии виртуализации
Наш канал на Youtube
Архив изданий
| 1999 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2000 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2001 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2002 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2003 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2004 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2005 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2006 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2007 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2008 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2009 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2010 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2011 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2012 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 2013 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
- О нас
- Размещение рекламы
- Контакты
Популярные статьи
Моноблок HP 205 G4 22 AiO — одно из лучших решений для офисной и удаленной работы
В настоящем обзоре мы рассмотрим модель моноблока от компании HP, которая является признанным лидером в производстве компьютеров как для домашнего использования, так и для офисов.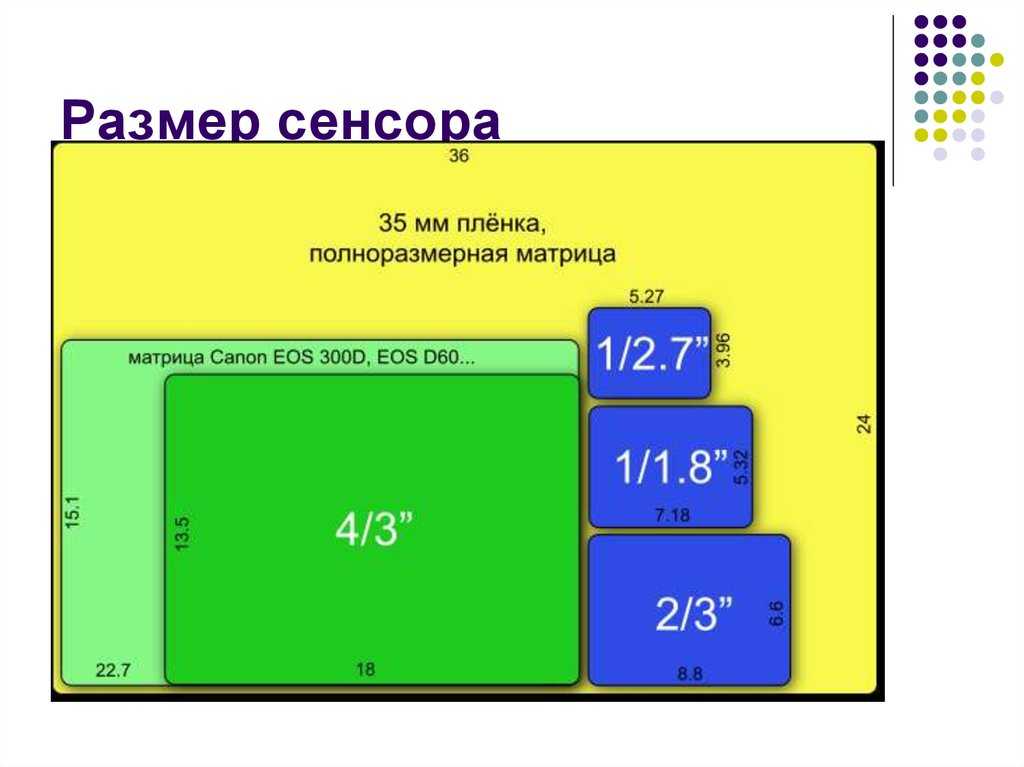 Моноблок HP 205 G4 22 — модель нового семейства, которая построена на базе процессоров AMD последнего поколения и отличается неплохой производительностью вкупе с привлекательной ценой
Моноблок HP 205 G4 22 — модель нового семейства, которая построена на базе процессоров AMD последнего поколения и отличается неплохой производительностью вкупе с привлекательной ценой
Logitech G PRO X Superlight — легкая беспроводная мышь для профессиональных киберспортсменов
Швейцарская компания Logitech G представила беспроводную игровую мышь Logitech G PRO X Superlight. Новинка предназначена для профессиональных киберспортсменов, а слово Superlight в ее названии указывает на малый вес этой модели, который не превышает 63 г. Это почти на четверть меньше по сравнению с анонсированным пару лет тому назад манипулятором Logitech G PRO Wireless
Материнская плата для домашнего майнинга ASRock h210 Pro BTC+
Как показало недавнее исследование Кембриджского университета — количество людей, которые пользуются сегодня криптовалютами, приближается к размеру населения небольшой страны и это только начало, мир меняется. Поэтому компания ASRock разработала и выпустила в продажу весьма необычную материнскую плату — h210 PRO BTC+, которую мы и рассмотрим в этом обзоре
Верхняя панель клавиатуры Rapoo Ralemo Pre 5 Fabric Edition обтянута тканью
Компания Rapoo анонсировала в Китае беспроводную клавиатуру Ralemo Pre 5 Fabric Edition.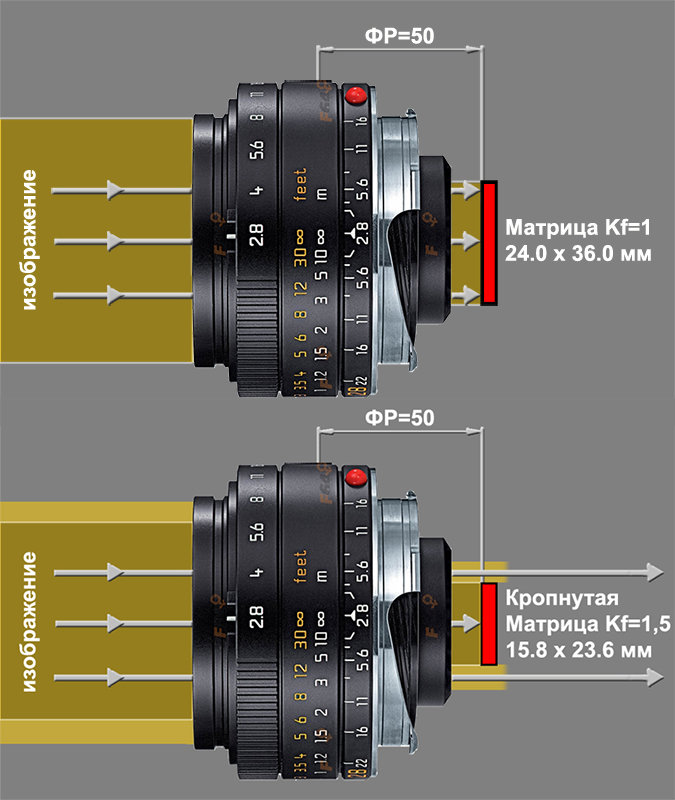 Новинка выполнена в формате TKL (без секции цифровых клавиш) и привлекает внимание оригинальным дизайном. Одна из отличительных особенностей этой модели — верхняя панель, обтянутая тканью с меланжевым рисунком
Новинка выполнена в формате TKL (без секции цифровых клавиш) и привлекает внимание оригинальным дизайном. Одна из отличительных особенностей этой модели — верхняя панель, обтянутая тканью с меланжевым рисунком
Изогнутый экран монитора MSI Optix MAG301 CR2 обеспечит максимальное погружение в игру
Линейку компьютерных мониторов MSI пополнила модель Optix MAG301 CR2, адресованная любителям игр. Она оборудована ЖК-панелью типа VA со сверхширокоформатным (21:9) экраном изогнутой формы (радиус закругления — 1,5 м). Его размер — 29,5 дюйма по диагонали, разрешение — 2560×1080 пикселов
Комплект SilverStone MS12 позволяет превратить SSD типоразмера M.2 2280 в портативный накопитель
Каталог продукции компании SilverStone пополнил комплект MS12. Он позволяет создать портативный накопитель на базе стандартного SSD типоразмера M.2 2280 с интерфейсом PCI Express
SSD-накопители ADATA XPG Spectrix S20G сочетают производительность с эффектным дизайном
Компания ADATA Technology анонсировала твердотельные накопители серии XPG Spectrix S20G. Они предназначены для оснащения игровых ПК и, как утверждают их создатели, сочетают высокую производительность и эффектный внешний вид
Они предназначены для оснащения игровых ПК и, как утверждают их создатели, сочетают высокую производительность и эффектный внешний вид
Видеокарта ASUS GeForce RTX 3070 Turbo оснащена системой охлаждения с одним центробежным вентилятором
Линейку видеоадаптеров ASUS на базе графических процессоров NVIDIA пополнила модель GeForce RTX 3070 Turbo (заводской индекс TURBO-RTX3070-8G), предназначенная для оснащения игровых ПК. Одной из особенностей новинки является конструкция системы охлаждения
КомпьютерПресс использует
Матрица камеры | Semantic Scholar
Известный как: Пространство камеры
В компьютерном зрении матрица камеры или проекционная матрица (камеры) представляет собой матрицу, которая описывает отображение камеры-обскуры из трехмерных точек в…
Wikipedia (opens in a new tab )Semantic Scholar использует ИИ для извлечения документов, важных для этой темы.
Оптическое сенсорное распознавание на непараметрических поверхностях обратной проекции для интерактивных физически-виртуальных впечатлений
- J.
 Hochreiter, Salam Daher, A. Nagendran, Laura Gonzalez, G. Welch
Hochreiter, Salam Daher, A. Nagendran, Laura Gonzalez, G. Welch - ПРИСУТСТВИЕ: телеоператоры и виртуальные среды
- 2016
- ID корпуса: 9403672
различные непараметрические и параметрические…
Теорема обобщенной проективной реконструкции и ограничения глубины для проективной факторизации
- Б. Насихаткон, Р. Хартли, Дж. Трампф
- International Journal of Computer Vision
- 2015
- Идентификатор корпуса: 13287549
Ручная камера для 3D-картирования отдельных деревьев на пробных лесных участках
- Xinlian Liang, A. Jaakkola, H. Kaartinen
- Дистанционное зондирование
- 2014
- Идентификатор корпуса: 18528425
В этом документе оценивалась возможность создания наземного облака точек с использованием некалиброванной ручной потребительской камеры…
Роботизированная сборка с визуальным наведением с использованием некалиброванного зрения
Многие сборки бытовой и промышленной электроники преимущественно выполняются вручную задачи из-за низких начальных затрат и высокой…
Глобальное планирование пути для надежного визуального следования в сложных условиях
Мы объединяем планирование глобального пути на основе выборки с визуальным сервоприводом (VS) для манипулятора, оснащенного встроенной камерой…
Высоко цитируемый
2008
Моделирование отношений пространства-времени и внешнего вида между камерами для отслеживания в непересекающихся видах
- О.
 Джавед, К. Шафик, З. Рашид, М. Шах
Джавед, К. Шафик, З. Рашид, М. Шах - Компьютерное зрение и изображение Understanding
- 2008
- Corpus ID: 6314204
Highly Cited
2006
Spatio-angular resolution tradeoffs in integral photography
- Todor Georgiev, K. Zheng, B. Curless, D. Salesin, S. Nayar, К. Интвала
- Симпозиум Eurographics по рендерингу
- 2006
- Идентификатор корпуса: 6593937
Встроенная камера сэмплирует четырехмерное световое поле сцены на одной фотографии. В этой статье исследуется фундаментальный компромисс…
Адаптивное управление калибровкой камеры планарных роботов: отказ от измерений пространственной скорости камеры
Рассматривается проблема отслеживания положения манипуляторов планарных роботов с помощью визуального слежения при наличии параметрического…
Отображение 3D-изображения с параллаксом движения с помощью матричной стереокамеры
Мы предлагаем систему отображения 3D-изображения, которая может отображать реальные сцены с реалистичным параллаксом движения. В сенсорной системе сцена…
В сенсорной системе сцена…
Высоко цитируемый
1990
Трехмерная камера Space Manipulation
- S. Skaar, W. Brockman, W. Jang
- Int. Дж. Робототехника Рез.
- 1990
- Идентификатор корпуса: 45161142
Эта статья распространяется на трехмерные задачи методом манипулирования пространством камеры. Для… 9 требуется минимум две камеры.0005
почему левая часть матрицы проекции (P) размером 3×3 отличается от внутренней матрицы камеры (K)?
мелодичный
Информация о камере
камера_калибровка
спросил 2021-12-16 06:25:59 -0500
koughua
13 ●1 ●1 ●3
Внутренняя матрица камеры для необработанных
(искаженных) изображений.[fx 0 cx]
K = [ 0 fy cy]
[ 0 0 1]
Проецирует 3D точки в системе координат камеры в 2D координаты пикселя с помощью фокусного длины (fx, fy) и главная точка (сх, су).Матрица проекции/камеры
[fx’ 0 cx’ Tx]
P = [ 0 fy’ cy’ Ty]
[ 0 0 1 0]
По соглашению эта матрица определяет внутреннюю (камера) матрица обработанная (исправленное) изображение. То есть слева Часть 3×3 — это обычная камера внутренняя матрица для выпрямленного изображение. Проецирует 3D-точки в кадр координат камеры в 2D пиксель координаты с использованием фокусных расстояний (fx’, fy’) и главную точку (cx’, cy’) — они могут отличаться от значения в К.предоставлены http://docs.ros.org/en/noetic/api/sen…
inage width: 1920 image height:1080 canera nane: узкое стерео
cameramatrix: rows: 3 cols:3
data:[1963,58626 0,978,96792 0,1961,4452 548,41778 0,0,1]Данные 0147: [-0,554099, 0,343450,-0,000465.0,001727, 0,000000]
матрица исправления: строки: 3 столбца:3
данные: [1. 0. 0. 0. 1. 0. 0.0. 1. ]
строк матрицы проекции. 3 cols:4
data: [1679.60999 0. 989.73115 0. 0.1875.7949 548.96323 0. 0. 0. 1. 0. ]
когда я использую камеру camera_caulibration the alibrator.py , для калибровки камера показывает результат левая часть матрицы проекции (P) размером 3×3 отличается от матрицы внутренней камеры (K), почему они отличаются?
как перейти от матрицы внутренней камеры (K) к матрице проекции (P)?
редактировать перетэг флаг оскорбительный закрыть объединить удалить
ответил 2021-12-16 07:47:14 -0500
обновлено 2021-12-16 07:53:03 -0500
Взгляните на эту страницу, на которую также есть ссылка в комментариях sensor_msgs/CameraInfo: https://wiki. ros.org/image_pipeline/C. ..
ros.org/image_pipeline/C. ..
Конкретно эта часть:
4.1 Простое монокулярное выпрямление
В данном случае имеется монокулярное устройство только с коррекцией дисторсии. Чтобы преобразовать пиксель входного изображения в пиксель выходного изображения, он проходит через серию преобразований K — D — R — K’. K — D получает нормализованное, неискаженное изображение; поворот R является тождественным, потому что мы не хотим вращать нормализованное неискаженное изображение; а затем K’ преобразуется обратно в координаты пикселей в выходном изображении. В этом случае, поскольку нет необходимости в перемещении в плоскости изображения или масштабировании исходного изображения, поэтому K = K’ , и необходимы только элементы K и D CameraInfo. Но начиная с ROS Electric, пакет camera_caulibation выполняет монокулярную калибровку, чтобы получить K’, используя OpenCV 9.0206 getOptimalNewCameraMatrix() функция с аргументом ‘альфа’=0,0, которая приводит к тому, что K’ ≠ K.
Проекция на выходное изображение выполняется матрицей P, которая формируется из K’ и необязательного поворота и перемещения, в данном случае тождество и 0 соответственно. Таким образом, если K’ = K, P является избыточной информацией и может быть сформирована непосредственно из K. 0.0. Если вы не исказите изображение, оно перестанет быть прямоугольным, и вы получите такой эффект подушечки для булавок:
Поскольку изображение должно быть прямоугольным для сохранения в памяти, оставшиеся пиксели заполняются черным цветом.
Функция
getOptimalNewCameraMatrix()масштабирует матрицу камеры K и вычисляет новый размер изображения таким образом, чтобы неискаженное (исправленное) изображение либо не содержало недопустимых пикселей (альфа = 0,0), либо чтобы все исходные пиксели содержались в изображении ( альфа = 1.0) или что-то среднее между ними. Кроме того, необходимо указать новый размер изображения для исправленного изображения. 9Пакет 0206 camera_dication использует альфа = 0 (т.