Как устроена матрица фотокамеры | Мир технологий
Матрица – главный элемент в любом фотоаппарате. Как формируется изображение на ней? Откуда берется цвет? Какое разрешение оптимально?
Откуда берется цвет
Какие есть типы матриц
Сколько мегапикселей достаточно
Светочувствительные матрицы используются во многих устройствах. Самое известное из них – фотокамера. Цифровые сенсоры заменили собой пленку, сделав съемку существенно проще и дешевле, открыв для масс возможность делать тысячи снимков, платя лишь раз – при покупке фотоаппарата.
Откуда берется цвет
Матрица фотоаппарата весьма непростое устройство, хотя на первый взгляд представляет собой просто ряды светочувствительных фотодиодов. Ее основная задача заключается в преобразовании полученных импульсов в электрический ток. Причем сделать это нужно так, чтобы в итоге получилось цветное изображение с высокой детализацией.
Когда фотографы спорят о том, матрица чьего фотоаппарата более точно и глубоко передает цвет, они даже не задумываются, что каждый из пикселей – монохромный. Цвет появляется благодаря хитрым системам. Таким, как мозаичные фильтры. Это самая распространенная технология получения цветного изображения.
Матрица накрыта тончайшим фильтром, который делит сенсор на субпиксели. Каждому из них присваивается свой цвет, в дальнейшем таким образом формируется общая картинка. Существует целый ряд подтипов, наиболее известным из которых является фильтр Байера, названный в честь сотрудника компании Kodak, доктора Брайса Э. Байера (Bryce Bayer), создавшего эту технологию в 1976 году.
Данный светофильтр делит каждый пиксель на два зеленых, красный и синий субпиксели. Таким образом изображение делится на точки, но метод не лишен недостатков. Главный из них – потеря четкости, так как недостающую информацию приходится интерполировать, то есть вычислять, дорисовывать.
Впрочем, существуют и альтернативные системы получения цветного изображения. Например, матрица Foveon, которую использует в своих фотокамерах компания Sigma. Foveon X3 по сути состоит из трех матриц (не путать с трехматричными системами 3CCD!), расположенных друг над другом, но не пропускает свет определенного спектра.
Поэтому нет необходимости применять интерполяцию – то, что попало на матрицу, записывается в файл. Но и эта система не идеальна: главным образом Foveon X3 страдает из-за высоких шумов. Дело в том, что идеально распределить получаемый свет по слоям крайне непросто, и некоторая часть света поглощается «чужим» слоем. Разумеется, изображение от этого не улучшается.
Система 3CCD используется в видеокамерах, скажу о ней кратко – специальная призма делит свет на три составляющие и каждая матрица формирует свое изображение, объединяющееся в одно силами процессора.
Какие есть типы матриц
Существует два основных типа: ПЗС (прибор с зарядовой связью – Charge-Coupled Device, CCD) и КМОП (комплементарная структура «металл-оксид-полупроводник» – Complementary Metal-Oxide-Semiconductor, CMOS). Вдаваться в технические подробности я не стану – принципиальная разница заключается в методе снятия заряда со светочувствительного элемента сенсора. На тематических форумах можно прочесть не одну сотню страниц, написанных пользователями, которые пытаются доказать, что ПЗС лучше КМОП и наоборот. Если же взглянуть на механизм формирования изображения, становится ясно, что на цветопередачу влияют многие параметры и способ передачи электрического сигнала от пикселя к процессору – далеко не главный. Вы наверняка замечали, что разные модели фотокамер имеют свою фирменную цветопередачу и даже уровень шумов. При этом производителей матриц немного. Безусловным лидером считается компания Sony, чьи матрицы используют также Nikon и Pentax.
Да что там разные производители! Во времена сотрудничества Samsung и Pentax разница в изображении «клонов» была весьма значительной. Изображения, формируемые на 14-Мп матрице корейского производства более грамотно формировались в «родном» Samsung GX-20, нежели в Pentax K20D, поэтому и цветопередача была точнее, и шумы меньшими. Все это доказывает: гораздо важнее правильно обработать сигнал.
Последним доводом в пользу того, что ПЗС «круче» КМОП является то, что средний формат до последнего времени использовал только матрицы первого типа. Но это происходило скорее из-за того, что данный рынок развивается медленнее, ведь спрос на дорогущие и не универсальные среднеформатные камеры не исчисляется миллионами. А в нынешнем году КМОП пришел и в высший сегмент – именно эти матрицы установлены в Pentax 645Z, а также в цифровом заднике Phase One IQ250.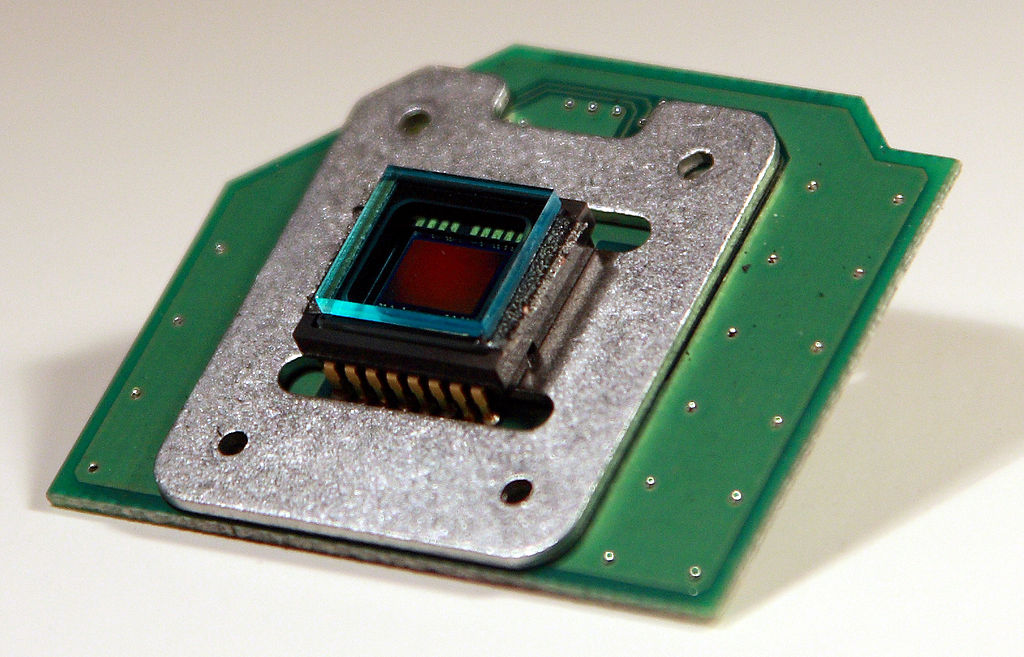
Сколько мегапикселей достаточно
Чем больше – тем лучше. В идеале, конечно. Ведь каждый пиксель – это дополнительная информация, которая повышает резкость, а в конечном итоге и детализацию. Но не все так просто.
Прежде всего, хочу разочаровать всех жаждущих заполучить фотокамеру с условными тремя мегапикселями и рабочими ISO 102400. Дело ведь не в том, что производители не хотят считаться с энтузиастами, которым не нужно сверхвысокое разрешение при отсутствии шумов. Такую матрицу сделать даже с современными технологиями непросто.
Но не надо расстраиваться! Прогресс не стоит на месте, и сегодняшние матрицы лучше прежних. Не верите? Хорошо, давайте рассмотрим вопрос во времени. Загляните на тематический форум, и вы найдете не один десяток сообщений, что, мол, новая 24-Мп камера – это уже слишком, вот есть же матрица с 14 Мп – на ней пиксели «жирные», а значит, лучше! Открываешь темы трех-пятилетней давности, где говорят: «Эх, наделали целых 14 Мп, куда столько? Лучше бы сделали новую 10-Мп, но с меньшими шумами». Восемь лет назад та же история наблюдалась при переходе от 6 Мп к 10 Мп. К чему это я? К тому, что, несмотря на рост разрешения, раньше камерой с матрицей формфактора APS-C можно было снимать на ISO 200–400, сегодня же я без опаски могу выставить и ISO 1600, а иногда и 3200. При этом следует учитывать, что, если снизить разрешение кадра с 24 до 6 Мп, шумы тоже снизятся, даже без применения дополнительных алгоритмов. Если добавить к этому возможность вырезать фрагменты кадра (если позволяет оптика) в значительно большей степени, нежели при низком разрешении, действительно получается, что чем больше пикселей, тем лучше. Главное, чтобы делали матрицы опытные инженеры, например, как в той же Sony.
Восемь лет назад та же история наблюдалась при переходе от 6 Мп к 10 Мп. К чему это я? К тому, что, несмотря на рост разрешения, раньше камерой с матрицей формфактора APS-C можно было снимать на ISO 200–400, сегодня же я без опаски могу выставить и ISO 1600, а иногда и 3200. При этом следует учитывать, что, если снизить разрешение кадра с 24 до 6 Мп, шумы тоже снизятся, даже без применения дополнительных алгоритмов. Если добавить к этому возможность вырезать фрагменты кадра (если позволяет оптика) в значительно большей степени, нежели при низком разрешении, действительно получается, что чем больше пикселей, тем лучше. Главное, чтобы делали матрицы опытные инженеры, например, как в той же Sony.
Матрица фотоаппарата — все самое главное и ничего лишнего
По сравнению с фотокамерами прошлых лет, у цифровых камер очень мало механических узлов. Их заменили электронные компоненты. Остался неизменным только принцип получения фотографии, который заключается в переносе видимого изображения на какой-либо физический носитель.
- Формирование изображения в фотокамере
- Типы матриц
- Важные характеристики матриц
- Кроп фактор
- Разрешение, мегапиксели
- Светочувствительность
- Отношение сигнал/шум
- Динамический диапазон
- Какой фотоаппарат выбрать
- Итоги
Формирование изображения в фотокамере
Матрица, фотодатчик, сенсор – это названия одного и того же устройства, входящего в конструкцию фотоаппарата и являющегося его основным элементом. По конструкции матрица это прямоугольная пластинка разных размеров из химически чистого кремния, на которой методом вакуумного напыления организовано большое количество n-p переходов. Эти переходы представляют собой светочувствительные фотодиоды или фототранзисторы. Таким образом, матрица это интегральная микросхема с несколькими миллионами светочувствительных элементов. Когда на фотодиод попадет свет, он преобразуется в электрический сигнал. В зависимости от объекта съёмки количество света может быть большим или меньшим. Электрические потенциалы с матрицы считываются построчно или поэлементно, затем обрабатываются процессором.
Эти переходы представляют собой светочувствительные фотодиоды или фототранзисторы. Таким образом, матрица это интегральная микросхема с несколькими миллионами светочувствительных элементов. Когда на фотодиод попадет свет, он преобразуется в электрический сигнал. В зависимости от объекта съёмки количество света может быть большим или меньшим. Электрические потенциалы с матрицы считываются построчно или поэлементно, затем обрабатываются процессором.
Типы матриц
Матрицы фотоаппаратов могут быть изготовлены по разным технологиям и иметь разные размеры. В фотокамерах применяются следующие виды сенсоров:
- ПЗС;
- КМОП;
- Live-MOS;
- 3 CCD.
ПЗС матрица состоит из полупроводниковых фотодиодов, а считывание электрических потенциалов осуществляется по горизонтальным строкам. Полевые структуры КМОП намного экономичнее, но за счёт электронных преобразований при считывании, качество картинки несколько хуже, чем на матрице ПЗС. Live-MOS является усовершенствованным КМОП сенсором.
Важные характеристики матриц
Полупроводниковая матрица цифрового фотоаппарата имеет ряд основных характеристик, от которых зависит качество изображения. Это следующие параметры:
- Размер
- Количество пикселей
- Чувствительность
- Динамический диапазон
- Соотношение сигнал/шум
К дополнительным характеристикам относится напряжение питания и энергопотребление. Они не влияют на картинку и в описании фотоаппарата обычно не указываются.
Кроп фактор
Это главный параметр полупроводниковой матрицы. От него, и в меньшей степени от количества пикселей, зависят важнейшие характеристики изображения, снятого камерой. Кроп фактор это цифра, показывающая, на сколько реальная матрица меньше полнокадрового стандарта. Full Frame – это размер матрицы 24 Х 36 мм. Такими сенсорами оснащаются самые дорогие и профессиональные фотоаппараты. Этот размер соответствует кадру на стандартной фотоплёнке. Для снижения стоимости фототехники, а так же для производства компактных и лёгких любительских фотокамер «мыльниц» применяются матрицы маленького размера.
Существует общепринятый ряд форматов светочувствительных матриц. За полнокадровыми матрицами следует размер 16 Х 24 мм, что соответствует кроп-фактору 1,5. Самыми маленькими сенсорами, применяемыми в недорогих фотоаппаратах, являются матрицы с размерами 4,5 Х 3,4 мм. Это кроп фактор 7,6. Они применяются в дешёвых моделях фотокамер, где высокое качество кадра не требуется.
Разрешение, мегапиксели
Количеством мегапикселей обычно хвастаются продавцы фотоаппаратов, когда предлагают товар начинающим фотолюбителям. К этому параметру следует относиться с осторожностью. Кадр цифрового фотоаппарата состоит из миниатюрных полупроводниковых элементов. Каждый пиксель это сверхминиатюрный фотодиод или фототранзистор. Теоретически получается, что чем больше пикселей, тем выше качество изображения, точнее проработка мелких деталей или разрешение. На практике большое количество пикселей повышает качество изображения только на матрицах большого размера.
Если размер кристалла небольшой, а изготовитель фотоаппаратов сумел разместить на нём большое количество светочувствительных элементов, то качество изображения будет невысоким. Очень важным для матрицы является не только размер отдельных фотоэлементов, но и расстояние между ними. Маленькие расстояния приводят к перегреву матрицы и возрастанию цифрового шума, который характеризуется цветными точками по всему изображению. Кроме того, при сильном диафрагмировании объектива фотокамеры, за счёт дифракции, вокруг элементов изображения будет появляться цветовая окантовка. Поэтому кадр, снятый на фотоаппарате с матрицей 5,4 Х 4,0 мм и 16 Мп, будет гораздо хуже снимка, полученного на камере с размерами матрицы 8,8 Х 6,6 мм и 10 Мп. Считается, что, в камерах, превышение числа мегапикселей свыше 25 будет излишним. Отчасти это связано с разрешением принтеров для фотопечати, когда самые продвинутые модели печатают фотографии с разрешением 9 600 Х 2 400 точек, что соответствует 23,4 мегапикселей.
Кроме того, при сильном диафрагмировании объектива фотокамеры, за счёт дифракции, вокруг элементов изображения будет появляться цветовая окантовка. Поэтому кадр, снятый на фотоаппарате с матрицей 5,4 Х 4,0 мм и 16 Мп, будет гораздо хуже снимка, полученного на камере с размерами матрицы 8,8 Х 6,6 мм и 10 Мп. Считается, что, в камерах, превышение числа мегапикселей свыше 25 будет излишним. Отчасти это связано с разрешением принтеров для фотопечати, когда самые продвинутые модели печатают фотографии с разрешением 9 600 Х 2 400 точек, что соответствует 23,4 мегапикселей.
Светочувствительность
Этот параметр в цифровых фотокамерах является относительной величиной. Кремниевая пластина со светочувствительными элементами имеет постоянную чувствительность. Всё дело в уровнях сигнала, которые поступают с фотодиодов для дальнейшего преобразования. Если на сенсор фотоаппарата поступает мало света, то электрический сигнал с него будет слабым и фотография будет тёмной. Для того чтобы сделать изображение более светлым слабый сигнал можно усилить.
- 50 – 45;
- 64 – 65;
- 100 – 90;
- 160 – 130;
- 320 – 250.
В левой графе величина чувствительности фотоаппарата, а в правой чувствительность фотоплёнки по ГОСТ.
Отношение сигнал/шум
Мелкие цветные точки на изображении возникают от разных причин. Прежде всего, сама матрица даже при отсутствии засветки будет выдавать слабый электрический потенциал. Это и есть шум. Чтобы он не влиял на изображение, уровень полезного сигнала должен намного превышать уровень шума. Шумовые характеристики матрицы повышаются с уменьшением размера пикселя и расстояния между отдельными точками. Поэтому самой некачественной картинкой будет та, которая получена на маленьком сенсоре с большим количеством мегапикселей. Шум фотокамеры заметно возрастает при увеличении коэффициента усиления или чувствительности. Поэтому, если это возможно, рекомендуется снимать на минимальной чувствительности. Отрицательно влияет на качество изображения нагрев матрицы фотоаппарата. Это происходит, когда она постоянно работает, выводя изображение на дисплей. Профессионалы стараются работать с оптическим видоискателем фотокамеры. В этом случае питание на матрицу подаётся только на очень короткое время, и она не успевает нагреться.
Шум фотокамеры заметно возрастает при увеличении коэффициента усиления или чувствительности. Поэтому, если это возможно, рекомендуется снимать на минимальной чувствительности. Отрицательно влияет на качество изображения нагрев матрицы фотоаппарата. Это происходит, когда она постоянно работает, выводя изображение на дисплей. Профессионалы стараются работать с оптическим видоискателем фотокамеры. В этом случае питание на матрицу подаётся только на очень короткое время, и она не успевает нагреться.
Динамический диапазон
Этот параметр определяется промежутком между минимальным и максимальным значением экспозиции, которые отчётливо видны на снимке. Если у фотоаппарата указан динамический диапазон 8 ступеней или EV, то на снимке будут видны объекты, отличающиеся по яркости в 256 (28) раз. Все предметы, яркость которых выше, получатся совершенно белыми. Нижний порог определяется уровнем шумов самой матрицы, а верхний максимальным электрическим зарядом фотодиода.
Какой фотоаппарат выбрать
При желании снимать всё подряд, не задумываясь о высоком качестве снимка, можно приобрести любой фотоаппарат типа компакт или «мыльница».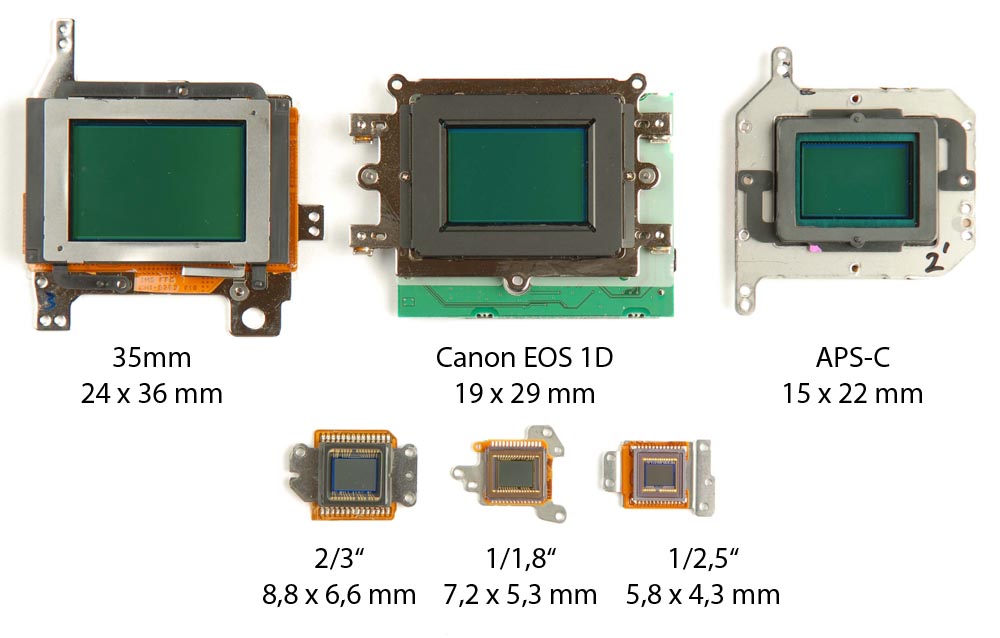 Отсутствие ручных режимов, большое количество сюжетных программ и фокусировка на лица, делает такой фотоаппарат простым в обращении и удобным для бытового использования. Для получения качественных снимков подойдёт недорогой фотоаппарат с матрицей большего размера и с возможностью ручной установки некоторых параметров съёмки. Ещё больше возможностей предоставляет пользователю беззеркальная камера «суперзум». Обладая небольшими размерами, она позволяет снимать интересные сюжеты на большом удалении от объекта съёмки, поэтому подойдёт для туристов и путешественников. Самые качественные снимки получаются с помощью зеркальной камеры, хотя её применение ограничивается большими размерами и весом. Если Вы хотите узнать все нюансы выбора фотокамеры, наши эксперты подготовили подробные инструкции в статье как выбрать фотоаппарат.
Отсутствие ручных режимов, большое количество сюжетных программ и фокусировка на лица, делает такой фотоаппарат простым в обращении и удобным для бытового использования. Для получения качественных снимков подойдёт недорогой фотоаппарат с матрицей большего размера и с возможностью ручной установки некоторых параметров съёмки. Ещё больше возможностей предоставляет пользователю беззеркальная камера «суперзум». Обладая небольшими размерами, она позволяет снимать интересные сюжеты на большом удалении от объекта съёмки, поэтому подойдёт для туристов и путешественников. Самые качественные снимки получаются с помощью зеркальной камеры, хотя её применение ограничивается большими размерами и весом. Если Вы хотите узнать все нюансы выбора фотокамеры, наши эксперты подготовили подробные инструкции в статье как выбрать фотоаппарат.
Итоги
При выборе фотоаппарата следует сначала ориентироваться на размер матрицы. Не стоит гнаться за большим количеством точек на изображении. 12-16 Мп более чем достаточно для получения и печати фотографий хорошего качества. Цифровой зум для камеры не слишком важен, так как он только позволяет растянуть центральную часть изображения на весь экран с ухудшением качества. Многие параметры не указываются в спецификации на фотоаппарат, поэтому перед выбором модели неплохо почитать отзывы фотолюбителей на специальных сайтах.
Не стоит гнаться за большим количеством точек на изображении. 12-16 Мп более чем достаточно для получения и печати фотографий хорошего качества. Цифровой зум для камеры не слишком важен, так как он только позволяет растянуть центральную часть изображения на весь экран с ухудшением качества. Многие параметры не указываются в спецификации на фотоаппарат, поэтому перед выбором модели неплохо почитать отзывы фотолюбителей на специальных сайтах.
с примером на Python | by Neeraj Krishna
Часть 3 обширной серии руководств по формированию изображения и калибровке камеры в Python
В предыдущей статье мы узнали о внешних свойствах камеры, которые должны смотреть на мир с точки зрения камеры. В этой статье мы увидим, как изображение формируется камерой, и узнаем о ее внутренних параметрах.
Фундаментальная идея формирования изображения заключается в захвате проекции точки на плоскость изображения камеры. Пиксели изображения соответствуют проекциям на плоскость изображения. Помните, что плоскость изображения похожа на пленку, которая захватывает световые лучи, отражающиеся от точек. Посмотрим, как это работает:
Помните, что плоскость изображения похожа на пленку, которая захватывает световые лучи, отражающиеся от точек. Посмотрим, как это работает:
На приведенном выше рисунке центр камеры расположен в начале координат 𝑂, а плоскость изображения находится на расстоянии 𝑓 от начала координат по направлению к оси Z -ve. 𝑓 называется фокусным расстоянием и обычно известен для камеры. Проекция точки 𝑃 на плоскость изображения равна 𝑃′. Координаты 𝑃 равны (𝑥, 𝑦, 𝑧), а координаты 𝑃′ равны (𝑥′, 𝑦′, 𝑓). Наша цель — найти координаты 𝑃′.
из рисунка,
△OMP и △OO′P′ — подобные треугольники.
⟹ х'/х = у'/у = f/z
⟹ x′ = x ∗ f/z и y′ = y ∗ f/z
Мы нашли координаты 𝑃′. Из приведенного выше уравнения видно, что по мере того, как точка 𝑃 удаляется от камеры, ее координата 𝑧 увеличивается, а ее проекция становится меньше. Таким образом, чем дальше объект от камеры, тем меньше он будет отображаться на изображении.
Чтобы получить пиксели изображения, мы просто берем координаты проекции, отбрасываем последнее измерение и наносим точки.
Например, мы нашли координаты 𝑃′ как (𝑥𝑓/𝑧, 𝑦𝑓/𝑧, 𝑓). Его координаты изображения будут (𝑥𝑓/𝑧, 𝑦𝑓/𝑧). Представим координаты изображения в виде (𝑢,𝑣), Тогда:
(u, v) = (xf/z, yf/z)
Итак, мы увидели, как камера формирует изображение. Итак, мы закончили со встроенными функциями камеры? Нет. В реальном мире все идет не так, как ожидалось, и на формирование образа влияют другие параметры.
Давайте рассмотрим каждый из них.
Масштаб
Когда вы покупаете камеру, ее регулируемое фокусное расстояние будет указано в ее описании, и обычно оно указывается в миллиметрах, но пространство, с которым вы работаете, может использовать другие единицы измерения, такие как пиксели. Поэтому нам нужно включить коэффициент масштабирования, который нормализует единицы измерения.
(u, v) = (𝛼 *x/z, 𝛼 * y/z)
Здесь вы можете представить 𝛼 как масштабированное фокусное расстояние или коэффициент преобразования.
Прямоугольные пиксели
В идеале мы предполагаем, что пиксели квадратные, но в реальном мире они могут быть прямоугольными с разной высотой и шириной. Из-за этого нам необходимо включить отдельные коэффициенты масштабирования для каждого измерения.
Из-за этого нам необходимо включить отдельные коэффициенты масштабирования для каждого измерения.
(u, v) = (𝛼 * x/z, 𝛽 * y/z)
Здесь 𝛼 — коэффициент масштабирования для измерения ширины, а 𝛽 — коэффициент масштабирования для измерения высоты.
Смещение
Перпендикулярная линия от центра камеры к плоскости изображения называется оптической осью. Точка пересечения этой оси с плоскостью изображения называется оптическим центром. Обычно оптический центр и начало плоскости изображения совпадают друг с другом, но в реальном мире они могут быть разнесены, как показано на рисунке ниже:
Оптический центр и начало координат могут не совпадатьПоэтому мы включаем смещение в уравнение чтобы учесть это:
(u, v) = (𝛼 * x/z + x0, 𝛽 * y/z + y0)
Здесь (𝑥0, 𝑦0) — смещение.
Наклон
До сих пор мы изображали плоскость изображения в виде прямоугольника, ширина и высота которого перпендикулярны друг другу. Но в реальном мире плоскость изображения может быть перекошена и напоминать параллелограмм, как показано на рисунке ниже:
Плоскость идеального изображения против плоскости перекошенного изображения Так что же нам делать с этим? Мы предположили, что оси перпендикулярны друг другу, а на самом деле они расположены под углом. Если подумать, это проблема смены базиса. Учитывая точку 𝑃 относительно стандартных ортонормированных осей, нам нужно выразить ее относительно наклонных осей. Пусть (𝑥, 𝑦) — координаты 𝑃 относительно стандартного ортонормированного базиса, а (𝑥′, 𝑦′) — его координаты относительно асимметричного базиса. Наша цель — найти (𝑥′, 𝑦′).
Если подумать, это проблема смены базиса. Учитывая точку 𝑃 относительно стандартных ортонормированных осей, нам нужно выразить ее относительно наклонных осей. Пусть (𝑥, 𝑦) — координаты 𝑃 относительно стандартного ортонормированного базиса, а (𝑥′, 𝑦′) — его координаты относительно асимметричного базиса. Наша цель — найти (𝑥′, 𝑦′).
На приведенном выше рисунке
cos(90−θ) = y/y′
⟹ sinθ = y/y′
⟹ y = y’sinθ
⟹ y′= y / sinθтакже
sin(90−θ) = (x - x')/y'
⟹ y'cosθ = x - x'
⟹ x' = x - y'cosθ
но, y'= y / sinθ
⟹ x' = x - ycosθ / sinθ
⟹ x′ = x - ycotθ
Теперь, когда мы нашли (𝑥′, 𝑦′), давайте включим их в уравнение. Нам просто нужно заменить старые координаты этими новыми координатами.
u = 𝛼 * (x - ycotθ)/z + x0
v = 𝛽 * (y / sinθ)/z + y0⟹ u = 𝛼x/z - (𝛼y/z)cotθ + x0
⟹ v = (𝛽y / zsinθ) + y0
Наконец, после учета параметров, влияют на формирование изображения, координаты изображения задаются как:
(u, v) = [𝛼x/z - (𝛼y/z)cotθ + x0, (𝛽y / zsinθ) + y0]
Мы можем представить это как матрицу умножение с использованием однородных координат:
Приведенная выше матрица называется внутренней матрицей камеры и обозначается 𝜅. Учитывая координаты точки мира относительно камеры, мы можем умножить их на внутреннюю матрицу камеры, чтобы получить однородные координаты точки на изображении.
Учитывая координаты точки мира относительно камеры, мы можем умножить их на внутреннюю матрицу камеры, чтобы получить однородные координаты точки на изображении.
Здесь,
𝑃′ - Однородные координаты точки на изображении
𝜅 - Внутренняя матрица камеры
𝑃𝑐 - Однородные координаты точки мира относительно камеры
Для преобразования из однородных координат просто делим на последний элемент :
Здесь (𝑢, 𝑣) представляют собой евклидовы координаты точки на изображении или положение пикселя.
Если вы заметили, последний столбец внутренней матрицы камеры является нулевым столбцом, и мы можем удалить его, поскольку он ни на что не влияет, и еще больше упростить матрицу следующим образом:
Теперь матричное уравнение можно переписать так:
Здесь не требуется представлять координаты точек в их однородном виде.
Здесь,
𝑓 - фокусное расстояние
𝑠 - коэффициент наклона
𝑐𝑥,𝑐𝑦 - вылет
𝑎 - соотношение сторон
Как видите, в собственной матрице камеры пять степеней свободы.
Вся эта теория может вас немного запутать. Итак, давайте сделаем практический пример, чтобы прояснить ситуацию.
Настройка
Репозиторий GitHub со всем кодом можно найти здесь.
Предполагая, что вы не настраивали среду ранее, вы можете сделать это сейчас, выполнив следующие команды:
# создать виртуальную среду в anaconda
conda create -n camera-caulication-python python=3.6 anaconda
conda активировать камера-калибровка-python# клонировать репозиторий и установить зависимости
git clone https://github.com/wingedrasengan927/Image-formation-and-camera-dication.git
cd Формирование изображения и калибровка камеры
pip install -r requirements.txt
Примечание: Предполагается, что у вас установлена anaconda.
Мы будем использовать две основные библиотеки:
- pytransform3d: Эта библиотека имеет отличные функции для визуализации и преобразования в трехмерном пространстве.

- ipympl: Это меняет правила игры. Это делает график matplotlib интерактивным, позволяя нам выполнять панорамирование, масштабирование и вращение в режиме реального времени в ноутбуке, что полезно при работе с 3D-графиками.
Пример Интуиция
В этом примере мы рассмотрим простую установку, в которой камера расположена в начале координат, а плоскость изображения находится над ней вдоль +ve оси Z (мы будем работать с левой ручная система координат). Далее наносим несколько точек так, чтобы все они лежали в одной плоскости, параллельной плоскости изображения и вершине ее. Таким образом, легко визуализировать проекции и формирование изображения. Затем мы создаем внутреннюю матрицу камеры и используем ее для проецирования точек на плоскость изображения и формирования изображения. Наконец, мы преобразуем плоскость изображения, используя эту матрицу. Подробное пошаговое объяснение приведено ниже.
Записная книжка встроена ниже:
Пройдемся по ней пошагово:
- Сначала импортируем необходимые библиотеки.
 Файл
Файл utils.pyсодержит все необходимые вспомогательные функции. Волшебная команда%matplotlib widgetвключает бэкэнд ipympl, который позволяет нам играть с графиками. - Далее мы определяем параметры плоскости изображения и точек. Здесь я взял 6 точек на высоте z=5 равномерно между пределами XY (-5, 5). Плоскость изображения находится на высоте z=2. Наконец, мы построим их все.
- Затем мы создаем внутренние матрицы камеры, которые позволяют нам проецировать точки на плоскость изображения и формировать изображение. Здесь мы создали четыре матрицы с разными параметрами, чтобы проиллюстрировать влияние каждой из них.
- Итак, мы поработали с параметрами и увидели их влияние на изображение. Теперь можно ли визуализировать, как будет выглядеть плоскость изображения в каждом случае? внутренняя матрица камеры представляет собой изменение базовой матрицы, и ее функция заключается в выборке точек из плоскости изображения.
 Теперь мы увидели, что можем получить матрицу преобразования, если возьмем обратную матрицу изменения базиса. Итак, давайте возьмем обратную внутреннюю матрицу камеры и применим результат к плоскости изображения. Тем не менее, мы должны удалить фокусное расстояние из сценария, так как он имеет дело с возвышением плоскости изображения, а мы хотим, чтобы возвышение было постоянным. Мы просто хотим увидеть влияние других параметров на плоскость изображения.
Теперь мы увидели, что можем получить матрицу преобразования, если возьмем обратную матрицу изменения базиса. Итак, давайте возьмем обратную внутреннюю матрицу камеры и применим результат к плоскости изображения. Тем не менее, мы должны удалить фокусное расстояние из сценария, так как он имеет дело с возвышением плоскости изображения, а мы хотим, чтобы возвышение было постоянным. Мы просто хотим увидеть влияние других параметров на плоскость изображения.
- На приведенном выше изображении показана плоскость изображения, если для параметра перекоса s установлено значение 2, изображение которого показано в правом верхнем углу предыдущего рисунка. Обратите внимание, как изображение и плоскость изображения ориентированы в противоположных направлениях.
Надеюсь, вам понравилась статья. Я призываю вас поиграть с блокнотом, повозиться с параметрами и посмотреть, как они влияют на изображение. Если у вас есть какие-либо сомнения или вопросы, пожалуйста, дайте мне знать в комментариях ниже.
- Введение в компьютерное зрение — Udacity
Все изображения и рисунки в этой статье, если их источник явно не указан в подписи, принадлежат автору.
IP-камера | Сетевые камеры | 5 МП 3 МП 2 МП
КАМЕРА IP-Безопасности
Matrix подходит для различных отраслей промышленности с рядом IP-камер безопасности (также известных как сетевые камеры) с датчиком Sony STARVIS для лучшего видеонаблюдения.
Оснащенные датчиком с задней подсветкой, эти камеры обеспечивают исключительную производительность при слабом освещении, поскольку они создают цветные изображения при освещении всего 0,01 люкс. Кроме того, он поставляется с технологией True WDR, обеспечивающей постоянное качество изображения в различных условиях освещения, особенно на открытом воздухе и в приемных в офисах, где частое открывание дверей подвергает воздействию яркого солнечного света. Наряду с изображениями высокого разрешения IP-камеры Matrix снижают затраты на хранение, предлагая новейшую технологию сжатия H. 265. Кроме того, Adaptive Streaming снижает частоту кадров в зависимости от движения, экономя до 50 % дискового пространства без ущерба для качества.
265. Кроме того, Adaptive Streaming снижает частоту кадров в зависимости от движения, экономя до 50 % дискового пространства без ущерба для качества.
Компания Matrix предлагает устойчивые к атмосферным воздействиям IP-камеры, обеспечивающие бесперебойную работу даже при экстремальных рабочих температурах. Эти камеры обеспечивают кристально чистое изображение высокой четкости и в то же время выдерживают суровые условия окружающей среды. Благодаря прочности наши IP-камеры можно использовать как внутри помещений (предпочтительнее купольные камеры), так и снаружи (предпочтительнее цилиндрические камеры).
Особенности
Превосходное качество изображения
Датчики с задней подсветкой для получения четких изображений при слабом освещении
Сжатие видео
В IP-камерах используется новейшая технология сжатия видео H.265
Интеллектуальная видеоаналитика
Обнаружение движения, натяжение провода и обнаружение вторжения
Более высокое поле зрения
Захват большего поля зрения, до 107,6° FOV
Интеллектуальная потоковая передача
Разделение одного потока на несколько разрешений в зависимости от его важности
Адаптивная потоковая передача
Запись с более низкой скоростью передачи данных в период бездействия.
True WDR
Стабильное изображение при различной освещенности
Область интереса
Разрешает потоковую передачу и запись важных областей только из всего изображения
Поддержка NAS
Запись может быть сохранена непосредственно на NAS/FTP Поддержка потоков
Поддержка до четырех различных потоков для просмотра, записи и удаленного мониторинга
Поддержка SD-карт
Локальное хранилище до 512 ГБ
Интеллектуальные оповещения
Отключение сети, конфликт IP и оповещение о хранении
Прямые уведомления
Уведомление центра наблюдения по электронной почте, SMS, аудио и уведомления о тревогах и загрузка на NAS/FTP
Отношение сигнал/шум
73 дБ SNR для состояния самое современное качество изображения
СЕРИЯ PROFESSIONAL IP-камеры серии Matrix Professional созданы специально для требовательных малых предприятий. Эти компактные камеры лучше всего подходят для SOHO и малых и средних предприятий.
Области применения: розничная торговля, BFSI, транспорт и логистика, научно-исследовательские лаборатории, региональные и филиалы, офисы и т. д.
Профессиональная купольная камера Профессиональная серия Bullet
СЕРИЯ PROJECT IP-камеры серии Matrix Project специально разработаны и изготовлены для требовательных крупномасштабных корпоративных и проектных приложений.
Области применения: ИТ и Аутсорсинг бизнес-процессов, производство, фармацевтика, здравоохранение, гостиничный бизнес, правительство, корпоративные офисы и т. д.
Купольная серия Project Серия Project Bullet
СЕРИЯ TURRET Серия Matrix Turret разработана для удовлетворения потребностей крупных предприятий, которым требуются компактные камеры.
Области применения: ИТ-индустрия, банковское дело, гостиничный бизнес, розничная торговля, государственные учреждения.