Новая версия Mathcad 8.0 • MONT
Новая версия Mathcad 8.0
02.03.2022 Распечатать новость
Компания PTC анонсировала выпуск новой версии PTC Mathcad Prime 8 в марте 2022 года.
Особенности новой версии включают:
Redefinition Warnings
Благодаря функции redefinition warnings (предупреждений о переопределении) в Mathcad Prime 8 предупреждения автоматически появляются при переопределениях в областях, которые их содержат. Пользователь может включать и выключать предупреждения для всех или отдельных категорий идентификаторов, чтобы более точно управлять использованием нужного.
Show Frame (верхний и нижний колонтитулы, тело страницы)
При использовании опции «Показать фрейм» Пользователь имеет возможность включить границы для области вычислений верхнего и нижнего колонтитула и тела страницы рабочего листа. Эти границы отображаются в режиме просмотра страницы, в печатных документах и на листах, сохраненных в формате PDF.
Partial Derivative Operator (Оператор частной производной)
Функция «Операторы» используют новый оператор для записи выражений в терминах частных производных.
Скопировать/вставить несколько значений в поле со списком
Mathcad Prime 7 включает элемент управления вводом в виде поля со списком для управления вычислениями на рабочих листах с помощью простых в создании и использовании раскрывающихся меню определений переменных.
В Mathcad Prime 8 добавлена возможность вставки нескольких значений переменных непосредственно в режим редактирования поля со списком. Пользователь может скопировать набор значений из матрицы, выбрать тот же размер данных в поле со списком и вставить. Или вставить в одно поле значения, и данные будут вставлены из этого места вниз и вправо. В обоих случаях поле со списком автоматически изменяет размер для размещения вставленных данных.
Усовершенствования символического движка
PTC Mathcad Prime 8 продолжает расширять функциональные возможности нового механизма символов, который был представлен в PTC Mathcad Prime 6.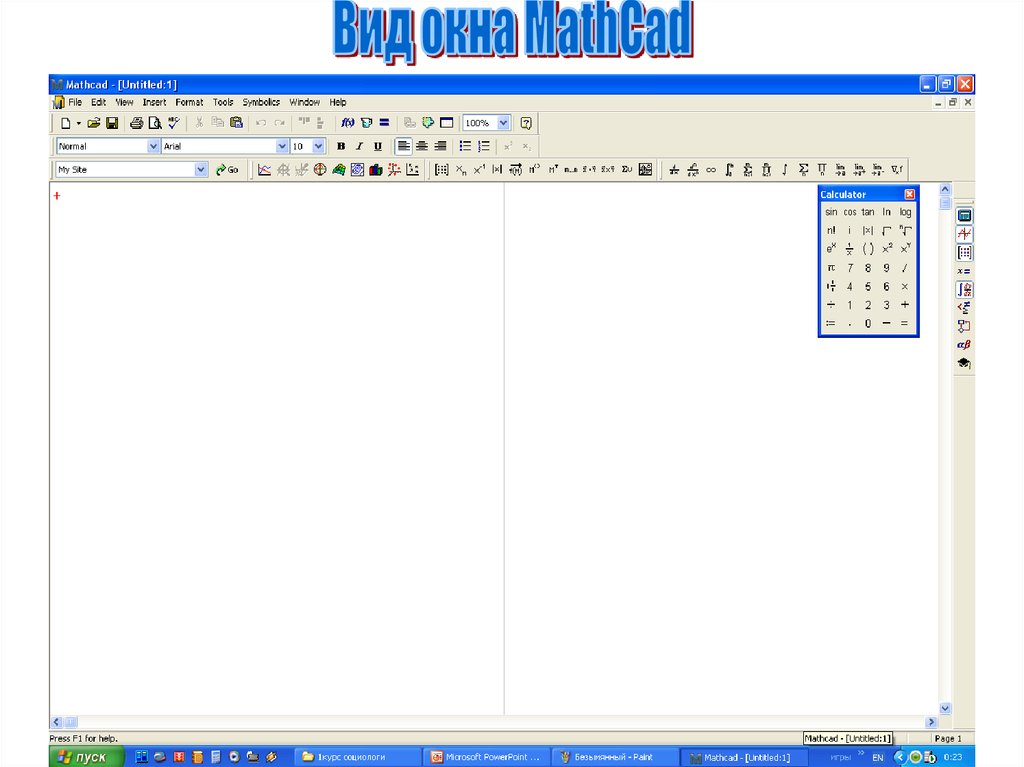 В PTC Mathcad Prime 8:
В PTC Mathcad Prime 8:
- Усовершенствования интегрального преобразования символов. Значительное улучшение и расширение использования и производительности, включая добавление поддерживаемых вариантов использования, были добавлены для следующих символьных интегральных преобразований:
- Фурье и инвфурье
- Лаплас и Инвлаплас
- зтранс и инвзтранс
- Новые модификаторы nfact и ofact для использования с ключевым словом Фурье, которое позволяет определять коэффициенты нормализации и колебания.
- Улучшена производительность и добавлены поддерживаемые варианты использования для операторов исчисления, включая ограничения, производные и интегралы.
- Улучшена производительность и добавлены поддерживаемые варианты использования для ключевых слов, включая «решить», «переписать», «серийно», «упростить», «предполагать».
- Улучшение обработки неопределенных переменных в символьных результатах, включая улучшенную автоматическую маркировку свободных неопределенных переменных и переменных в лямбда-выражениях.

Усовершенствования числового движка
В PTC Mathcad Prime 8 были внесены следующие обновления и усовершенствования числового механизма.
- Обновлены физические константы. В соответствии с NIST и CODATA были обновлены несколько физических констант, в том числе следующие:
- постоянная Планка
- постоянная Больцмана
- приведенная постоянная Планка
- атомная единица массы
- число Авогадро
- молярная газовая постоянная
- постоянная тонкой структуры
- элементарный заряд
- постоянная Стефана – Больцмана
- квант магнитного потока
- постоянная Ридберга
- более четкие сообщения об ошибках, связанные с поведением функций statespace и odesolve при неправильной настройке.
Улучшения удобства использования
Были сделаны следующие улучшения:
- Ctrl/Wheel zoom теперь можно использовать для увеличения и уменьшения рабочего листа.
- Ползунок масштабирования теперь по умолчанию имеет шаг 5%, когда используются элементы управления + и -.
- С помощью кнопки «Закрыть» на вкладках рабочих листов теперь можно закрывать рабочие листы непосредственно с вкладки рабочего листа.
- Индикатор несохраненного рабочего листа: для рабочих листов, которые еще не сохранены, на вкладке рабочего листа появится звездочка.
- Контекстное меню на вкладках рабочего листа: новое контекстное меню теперь доступно на всех вкладках рабочего листа, обеспечивая доступ к полезным действиям, в том числе:
- Рассчитать
- Закрыть (этот рабочий лист, все рабочие листы, другие рабочие листы, рабочие листы слева/справа, неизмененные рабочие листы)
- Переместить вкладку
- Скопировать полный путь к файлу
- Открыть содержащую папку
- Распечатать
- Сохранить как
- Перетаскивание вкладок рабочего листа: когда открыто несколько рабочих листов, выбранную вкладку рабочего листа теперь можно перетаскивать, чтобы упорядочить вкладки рабочего листа в соответствии с предпочтениями пользователя.
- Команда «Очистить текстовый формат»: теперь можно очистить форматирование текста (шрифт, размер шрифта, цвет и т.д.) для выделенного текста, вернув его к текстовому формату по умолчанию.
И ещё
Предыдущие обновления:
- Конвертер листов PTC Mathcad Prime 8.0 позволяет сохранять рабочие листы Mathcad 15 предыдущих версий в формате HTML.
Благодаря автономному конвертеру, представленному в PTC Mathcad Prime 7.0, больше не нужна устаревшая установка Mathcad для преобразования устаревших рабочих листов Mathcad 15 в формат Mathcad Prime. Благодаря функции «Сохранить как HTML» в конвертере PTC Mathcad Prime 8.0 XMCD MCD теперь можно создать представление рабочего листа прежней версии Mathcad 15, поэтому больше не потребуется установка прежней версии Mathcad для просмотра конвертируемого содержимого.
Используйте функцию «Сохранить как HTML» в конвертере, чтобы создать представление вашего устаревшего рабочего листа Mathcad 15, прежде чем преобразовать его в формат Prime, и ссылаться на него, чтобы проверить новый рабочий лист Prime и помочь с доработкой, где это необходимо.
НОУ ИНТУИТ | Лекция | Графика
< Дополнительный материал || Лекция 3: 123456
Аннотация: В лекции представлены методы построения типичных графиков функций на плоскости и в пространстве, а также инструменты их редактирования, форматирования и настройки. Описаны разные технологические приемы построения графиков функций: автоматически, с помощью сетки и с применением специальных функций.
Ключевые слова: программа, координаты, панель инструментов, графика, меню, список, шаблон, прямоугольник, имя функции, курсор, область определения, функция, график, множества, значение, опция, радиус, массив
Цель лекции. Научить строить графики функций в разных системах координат с помощью различных технологических приемов. Показать способы форматирования и настройки разных типов графиков и диаграмм.
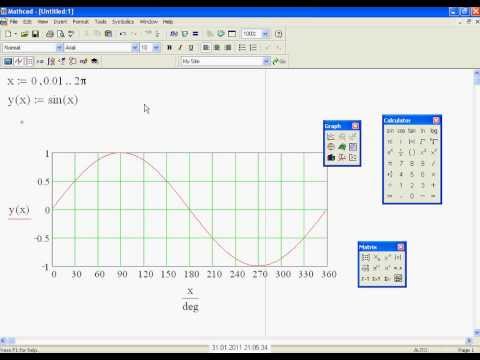
3.1. Инструменты графики
MathCAD предоставляет широкие возможности для построения графиков.
Панель Математика содержит панель инструментов графики. Для построения графиков используются шаблоны. Большинство параметров графического процессора, необходимых для построения графиков, по умолчанию задается автоматически. Поэтому для начального построения графика того или иного вида достаточно задать тип графика. На панели Graph (Графика) или в меню Insert/ Graph (Вставка/Графика) содержится список из семи основных типов графиков.
Рис. 3.1.
- Декартов график [@] —шаблон двухмерного графика;
 intuit.ru/2010/edi»>Полярный график [Ctrl+ 7] —шаблон графика в полярной системе координат;
intuit.ru/2010/edi»>Полярный график [Ctrl+ 7] —шаблон графика в полярной системе координат;- График поверхности [Ctrl+ 2] — шаблон для построения трехмерного графика;
- Карта линий уровня [Ctrl+ 5] —шаблон для контурного графика трехмерной поверхности;
- 3D точечный график –шаблон для графика в виде точек в трехмерном пространстве;
- 3D столбиковая гистограмма –шаблон для изображения в виде совокупности столбиков в трехмерном пространстве;
- Векторное поле— создать шаблон для графика векторного поля на плоскости.
Для вывода шаблона двухмерной графики в декартовой системе координат служит кнопка декартов график на панели Graph [3, 8]. Она выводит в текущее положение курсора шаблон графиков в декартовых координатах (Рис. 3.2). Незаполненный шаблон графика — пустой прямоугольник с шаблонами данных в виде темных маленьких прямоугольников, расположенных около осей абсцисс и ординат будущего графика.
3.2). Незаполненный шаблон графика — пустой прямоугольник с шаблонами данных в виде темных маленьких прямоугольников, расположенных около осей абсцисс и ординат будущего графика.
Рис. 3.2. Шаблон графика в декартовых координатах
В средние шаблоны данных надо поместить имя функции F(x) оси абсцисс x. Если строятся графики нескольких функций в одном шаблоне, то для их разделения следует использовать запятые. Крайние шаблоны данных служат для указания предельных значений абсцисс и ординат, т. е. они задают масштабы графика. Если оставить эти шаблоны незаполненными, то масштабы по осям графика будут устанавливаться автоматически. Масштабы, могут оказаться неудобными для представления целиком всего графика в максимальном размере. Рекомендуется всегда вначале использовать автоматическое масштабирование, а затем изменять масштабы на более подходящие.
3.2. Построение графиков функций на плоскости
Для построения графика функции надо написать функцию, выбрать интервалы построения графика по оси X и Y и обозначить параметры графика. При этом следует учитывать область допустимых значений существования функции или область определения. Если функция задана формулой, то область определения состоит из всех значений независимой переменной, при которых формула имеет смысл. График функции может быть представлен в различных системах координат. Наиболее употребительна прямоугольная координатная система – декартова. На плоскости применяют полярные системы координат, а в пространстве, наряду с декартовыми, цилиндрические и сферические системы координат.
3.2.1.Декартов график
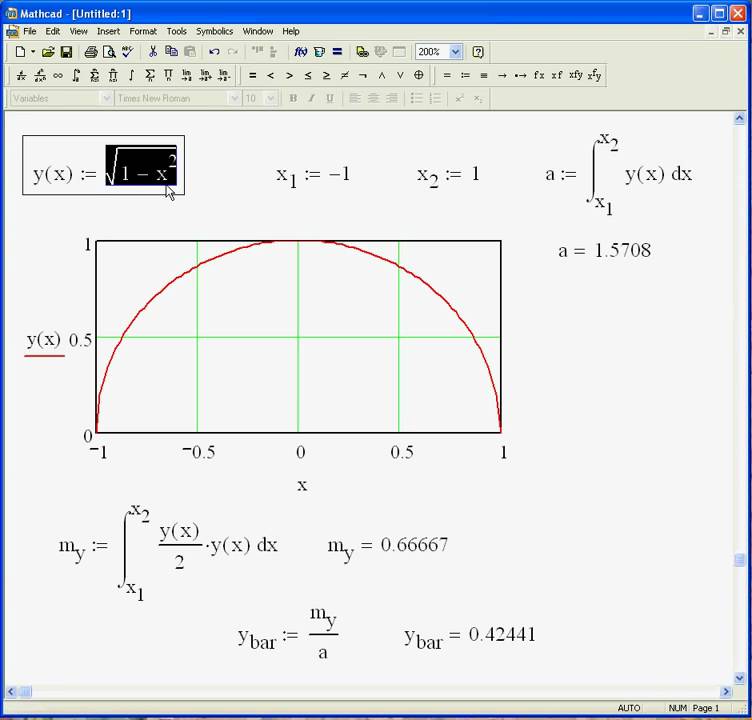
Пример 3.1. Построить графики функций : , , . Функция не существует в точке . Но график строится и никаких дополнительных действий предпринимать не нужно. В отличие от построения графиков поверхности. Но эту проблему рассмотрим ниже.
Но график строится и никаких дополнительных действий предпринимать не нужно. В отличие от построения графиков поверхности. Но эту проблему рассмотрим ниже.
Построение графика
Форматирование графика
Параметры изображения (цвет и толщина линий, координатная сетка, разметка осей, надписи на графиках и др.) можно изменить, вызвав команду меню Format/Graph/X-Y Plot (Формат/График/декартов график) или щелкнув дважды по полю графика. Появится окно Formatting Currently Selected X-Y Plot (Форматирование выбранного графика
), в котором устанавливаются настройки в соответствующих вкладках (Рис.3.7).Рис. 3.7. Окно форматирования декартова графика
- Вкладка X-Y оси устанавливает для осей X и Y : тип шкалы: логарифмическая Log scale, цифровая Numbered), линии сетки (Grid Lines), Сетку автоматическую (Auto Grid) или режим задания количества меток (Number of Grid).
 Внизу устанавливается стиль вида осей (Axes Style)/
Внизу устанавливается стиль вида осей (Axes Style)/ - Вкладка Traces устанавливает условные обозначения различных кривых графика.
- Вкладка Надпись (Labels) расположение надписей.
Установка границ на осях координат
MathCAD обеспечивает следующие возможности устанавливать границы на осях координат:
- Автоматически, с включенным режимом Авто масштаб (Autoscale)(см. закладка » X-Y Оси » ).
- Автоматически, с выключенным режимом Авто масштаб.
- Вручную, вводя границы непосредственно на графике.
При включенном режиме Авто масштаб MathCAD устанавливает границу на каждой оси соответствующей первому главному делению, выходящему за пределы значений данных
 intuit.ru/2010/edi»>При выключенном режиме Авто масштаб MathCAD устанавливает границы на осях точно равными пределам данных.
intuit.ru/2010/edi»>При выключенном режиме Авто масштаб MathCAD устанавливает границы на осях точно равными пределам данных.
Добавление горизонтальных и вертикальных линий
Чтобы добавить горизонтальную или вертикальную линию к графику:
- вызвать окно форматирования графика в декартовых координатах,
- в диалоговом окне Форматирование— закладка » X-Y Оси » ,
- щёлкнуть » Нанести риски » (для X-оси, или Y-оси). MathCAD показывает два дополнительных пустых поля на каждой оси, для которой включена опция » Нанести риски «,
- впечатать значение, для которого нужно провести линию,
- чтобы удалить линию, удалить это число или щёлкните на поле » Нанести риски «
Дальше >>
< Дополнительный материал || Лекция 3: 123456
Работа с фреймами — MATLAB & Simulink
Работа с фреймами
Фреймы представляют собой триады осей, которые кодируют данные о положении и ориентации в трехмерном пространстве.
Роль рам
Каждый твердотельный компонент имеет одну или несколько локальных рам, к которым он жестко привязан. прикрепил. Позиционируя и ориентируя рамы компонентов, вы позиционируете и ориентировать сами компоненты. Такова роль фреймов в модель — чтобы вы могли указать пространственные отношения между компонентами.
Работа с кадрами
Порт кадра идентифицирует локальный кадр на компоненте. Например, порт кадра R
сплошной блок идентифицирует локальную систему отсчета твердого тела. Каждый блок
имеет один или несколько портов кадра, которые вы подключаете, чтобы найти
сопутствующие компоненты в пространстве. На рисунке показана система отсчета
порты на нескольких из Элементы кузова блоков.
Соединения между портами кадра определяют пространственные отношения между их кадры. Прямая линия соединения рам делает соединенные рамы совпадающие в пространстве. Блок жесткого преобразования устанавливает вращательные и поступательные смещения между кадрами. На рисунке показаны примеры совпадающих и смещенных соединений рам.
Совпадающая взаимосвязь между твердыми фреймами сама по себе не составляет совпадающие отношения между твердотельными геометриями. Пространственный расположение двух твердотельных геометрий зависит не только от пространственного расположения соответствующих систем отсчета, но и от того, как геометрия определяется относительно этих кадров.
Если две геометрии отличаются друг от друга, или если их положение и
ориентации относительно их систем отсчета отличаются друг от друга,
то совмещение систем отсчета приведет к тому, что твердое тело
геометрия должна быть смещена. На рисунке соединение рамы Solid A
к левой рамке Solid B соединяет тела таким образом, что их геометрия
смещены друг от друга.
Custom Solid Frames
Блок Solid предоставляет интерфейс для создания фреймов, который можно использовать для создать новый, пользовательский , кадры. Вы можете позиционировать и ориентировать пользовательский фрейм, использующий геометрические элементы, такие как вершины, ребра и грани. Более удобно с точки зрения инерции, вы можете сделать то же самое, используя центр масс и три главные оси тела.
Попробуйте: Создайте пользовательскую сплошную раму
Создайте пользовательскую раму, используя интерфейс создания рамы в файле Твердый блок. Затем поместите начало кадра в центр масс и совместите оси рамы с главными осями инерция. В результате получается кадр, совпадающий с главным система отсчета — та, в которой матрица инерции является диагональной, а произведения инерции равны нулю.
В командной строке MATLAB введите
smdoc_lbeam_inertia. Модель открывается с твердое тело, имеющее форму L-образной балки.В твердом файле диалоговое окно блока, нажмите кнопку Create Frame кнопка.
 Блок File Solid
диалоговое окно переключается в режим создания кадра.
Блок File Solid
диалоговое окно переключается в режим создания кадра.Измените параметр Имя кадра на
P(для «основного кадра»). панель визуализации и порт фрейма используют эту метку для идентификации твой новый кадр.В разделе Происхождение кадра выберите радио кнопка с надписью В центре масс .
В разделе > и > выберите переключатель с надписью Вдоль Основная ось инерции . Принять ось по умолчанию опции (
+Zи+Xсоответственно) и нажмите Сохранить . Диалоговое окно блока переключается вернуться к основному виду (параметры).На панели инструментов визуализации нажмите переключатель кнопка видимости фреймов . Визуализация на панели отображаются рамки твердого тела, включая новые пользовательские рама, P .
Что такое преобразования кадров?
Вращательные и поступательные смещения между кадрами называются преобразованиями.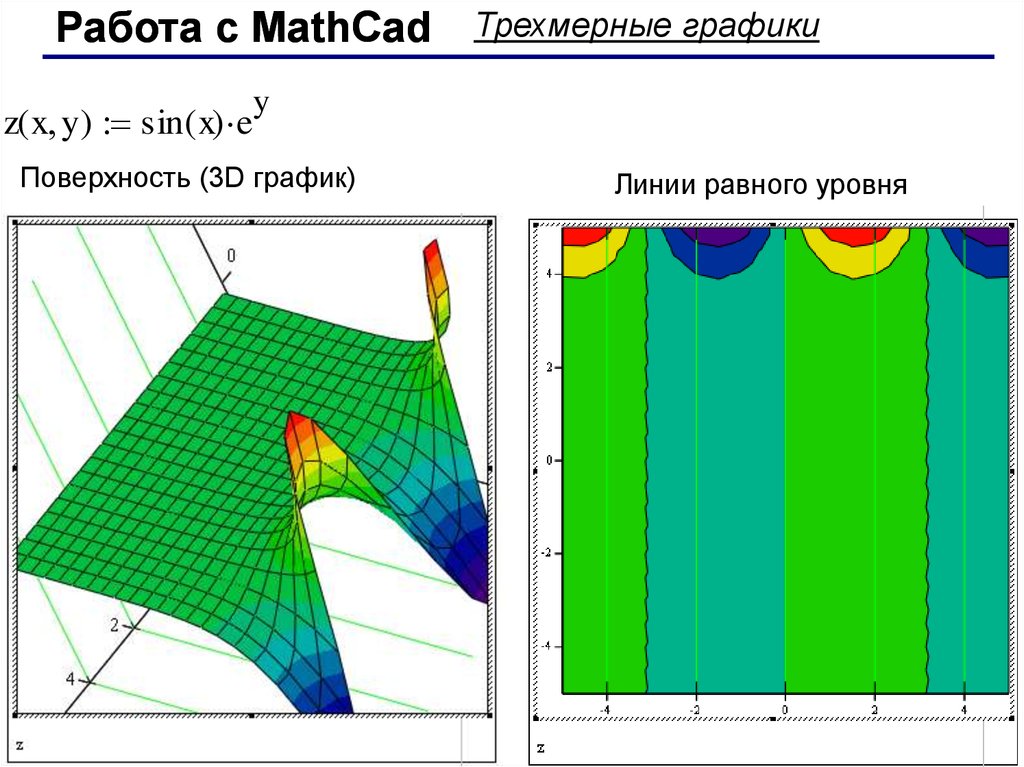 Если
преобразования постоянны во времени, они называются жесткими. Жесткий
преобразования позволяют зафиксировать относительное положение и ориентацию
компонентов в космосе, например, для сборки твердых тел в тела.
Если
преобразования постоянны во времени, они называются жесткими. Жесткий
преобразования позволяют зафиксировать относительное положение и ориентацию
компонентов в космосе, например, для сборки твердых тел в тела.
Работа с Frame Transforms
Вы используете блок Rigid Transform, чтобы указать вращательное, поступательное или смешанное жесткое преобразование между кадрами. преобразования являются направленными. Они задают вращение и перемещение кадр, известный как подчиненный, по отношению к кадру, известному как базовый.
Метки порта кадра на блоке Rigid Transform определить базовый и подчиненный кадры. Фрейм, подключенный к порту B служит базой. Фрейм, подключенный к порту F, служит повторителем. Изменение соединения портов на противоположное меняет направление, в котором применяется преобразование.
Вы можете указать преобразование, используя различные методы. Для вращения
преобразования, к ним относятся пары ось-угол, матрицы поворота и
последовательности вращения. Для трансляционных преобразований они включают
векторы поступательного смещения, определенные в декартовой или цилиндрической форме
системы координат.
Для трансляционных преобразований они включают
векторы поступательного смещения, определенные в декартовой или цилиндрической форме
системы координат.
Если вращательное и поступательное преобразования равны нулю, связанные системы координат совпадают в пространстве. Это отношение известно как тождество и эквивалентен прямому фрейму соединительная линия между портами кадра, т. е. без Блок жесткого преобразования.
Визуализация преобразований кадров
Вы можете визуализировать кадры и исследовать преобразования между ними. кадры с помощью панели визуализации сплошного блока или обозревателя механики. Используйте панель визуализации сплошного блока, чтобы изучить кадры один сплошной элемент. Нажмите кнопку Переключить видимость кадров на панели инструментов визуализации, чтобы отобразить все сплошные рамки.
Каркас на твердом теле
Используйте Mechanics Explorer для визуализации каркасов более чем
один твердотельный элемент — например, в составных телах, многотельных
подсистемы или полные многотельные модели. Выберите > в меню Mechanics Explorer, чтобы отобразить все кадры. Выбирать
узел из панели древовидного представления, чтобы показать только те кадры, которые принадлежат
к выбранному компоненту.
Выберите > в меню Mechanics Explorer, чтобы отобразить все кадры. Выбирать
узел из панели древовидного представления, чтобы показать только те кадры, которые принадлежат
к выбранному компоненту.
Рамки на теле
Попробуйте: укажите преобразование рамы
В этом примере показано, как сместить два твердых тела относительно друг друга, указав рамку преобразования между твердыми системами отсчета. Он показывает три вида преобразования: перемещение, вращение и комбинированное преобразование.
Создайте модель с двумя телами
В командной строке MATLAB ® введите
smnew. А Симскейп™ Откроется шаблон модели Multibody™ с часто используемыми блоками.Удалить Simulink-PS Преобразователь, PS-Simulink Преобразователь и блоки Scope потому что они не используются в этом примере.
Показать названия блоков Rigid Transform и Brick Solid.
 Щелкните правой кнопкой мыши блоки и
выберите > > .
Щелкните правой кнопкой мыши блоки и
выберите > > .Сделайте копию блока Brick Solid и переименуйте его. блоки для Базы и Последователя.
Соедините остальные блоки, как показано на следующем рисунке.
Запустите модель. Обозреватель механики открывается с визуализацией модели. В Исследователе механики , нажмите кнопку Изометрический вид .
В области дерева щелкните Base и Последователи узлов. Панель визуализации показывает системы отсчета двух блоков Brick Solid, которые показывает, что они совпадают в пространстве.
Применить преобразование
В этом разделе показано, как применить преобразование к подчиненному кадру путем с помощью блока Rigid Transform.
Подключите блок Rigid Transform между двумя блоками Brick Solid.
Дважды щелкните Жесткое преобразование блокировать.
 В его диалоговом окне установите:
В его диалоговом окне установите:Нажмите OK , чтобы сохранить настройки и закрыть окно. Диалоговое окно «Жесткое преобразование».
Нажмите кнопку Обновить диаграмму в Обозреватель механики для обновления модели.
В древовидной панели щелкните узел Жесткое преобразование, чтобы отобразить Базовая и ведомая рамы.
Применение поворота
В этом разделе показано, как применить поворот вокруг x -ось к следящей раме с помощью Блок жесткого преобразования.
В диалоговом окне блока Жесткое преобразование коробка, набор:
Нажмите OK и обновите блок диаграмма.
В древовидной панели щелкните узел Rigid Transform . На следующем рисунке показан процесс и конечный результат вращение. В конечном результате подсвечивается тело блока Follower.
Применение комбинированного преобразования
В этом разделе показано, как применить комбинированное преобразование, которое включает перевод
и вращение к ведомой раме с помощью Rigid
Преобразовать блок.
В диалоговом окне блока Rigid Transform коробка, комплект:
Нажмите OK и обновите блок диаграмма.
В древовидной панели щелкните узел Rigid Transform . Следующее На рисунке показан процесс и конечный результат комбинированного преобразования.
Если в Блок Rigid Transform, блок всегда сначала применяет преобразование к следующему кадру. переводы описать, как ведомый кадр перемещается относительно своего базового кадра. Любой вращения вокруг осей базовой рамы всегда относительно осей переведенная базовая рама.
См. также
- Моделирование тел
- Создание рамок соединения
- Визуализация рамок Simscape Multibody
Концепции на основе образцов и рамок — MATLAB & Simulink
Понятия на основе выборок и кадров
Этот раздел начинается с определения основных понятий, таких как выборки и кадры, шаг расчета
(также известный как период выборки), частота выборки, период кадра и частота кадра, все в
контекст Simulink 9Модель 0137 ® .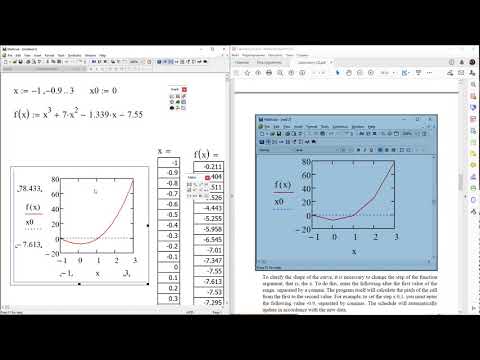 Затем в теме обсуждаются генерация сигналов, обработка сигналов в
режимы на основе семплов и кадров, а также кратко обсуждаются преимущества
обработка на основе кадров.
Затем в теме обсуждаются генерация сигналов, обработка сигналов в
режимы на основе семплов и кадров, а также кратко обсуждаются преимущества
обработка на основе кадров.
Частота дискретизации и частота кадров
Выборки и кадры
Выборка — это значение или набор значений (многоканальный сигнал) сигнала в данный момент времени. Кадр представляет собой вектор или матрицу (многоканальный сигнал) буферизованные образцы последовательного времени, сложенные вместе. И кадры, и образцы могут быть матрицами, но в кадрах первое измерение анализируется как временная область и второе измерение анализируется как каналы.
Время выборки (или период выборки)
Время выборки T с блока
параметр, который указывает, когда блок производит выходные данные во время симуляции и,
при необходимости обновляет свое внутреннее состояние. Время выборки — это интервал времени
между отдельными образцами в кадре.
Время выборки — это интервал времени
между отдельными образцами в кадре.
Частота дискретизации
Частота дискретизации сигнала является обратной величиной времени дискретизации (или период) Т с , то есть 1/Ц.
В большинстве случаев при построении модели Simulink необходимо устанавливать частоты дискретизации только для исходных блоков. Simulink автоматически вычисляет соответствующие частоты дискретизации для блоков. подключены к исходным блокам.
Период кадра и его связь с образцом Период
Период кадра T f задается произведение шага расчета T s и размер кадра M , и он представлен с помощью этого уравнение:
Ts=Tf/M
Частота кадров
Частота кадров сигнала является обратной величиной периода кадра T f и может быть представлен
используя 1/Tf.
На этой диаграмме показан одноканальный сигнал с размером кадра M из 4 и период кадра T f 1 сек. Образец период T с , следовательно, равен 1/4 или 0,25 секунды.
В большинстве случаев шаг расчета последовательности T s важнее, а частота кадров является просто следствием размера кадра, который вы выбираете для сигнал. Для последовательности с заданным шагом расчета соответствует больший размер кадра к меньшей частоте кадров и наоборот.
Входной и выходной образец и кадр Period
В Simulink блоки могут иметь разные скорости для своих входов и выходов
(блоки преобразования скорости). Период кадра и частота кадров на входе и
выход блока рассчитывается на основе шага расчета и кадра сигнала
размер. В большинстве случаев, когда вы строите модель Simulink, вам нужно установить частоту дискретизации только для исходных блоков.
Simulink автоматически вычисляет соответствующие частоты дискретизации для блоков.
подключены к исходным блокам.
В большинстве случаев, когда вы строите модель Simulink, вам нужно установить частоту дискретизации только для исходных блоков.
Simulink автоматически вычисляет соответствующие частоты дискретизации для блоков.
подключены к исходным блокам.
Период входного кадра ( T fi ) сигнала является временной интервал между последовательными вводами кадров в блок. Точно так же период выходного кадра ( T fo ) — время, когда блок обновляет вектор кадра или матричное значение в выходном порту.
В частности, шаг расчета входных данных
( T si ) и выходы
( T поэтому ) связаны с их
соответствующие периоды системы отсчета по следующим уравнениям: M o вход и выход
размеры рамы соответственно.
Математически частота кадров на входе определяется как 1/Tfi, а частота кадров на выходе определяется как 1/Tfo.
Генерация сигналов
Некоторые исходные блоки, такие как блок From Multimedia File и блок
Блок Signal From Workspace может
импортировать сигналы из файла по указанному пути или из рабочего пространства MATLAB ® . Несколько блоков, таких как блок Colored Noise и блок Sine Wave, генерируют сигналы.
по заранее заданному алгоритму. Полный список блоков, которые генерируют сигналы в
DSP System Toolbox™, см. список блоков в категории Signal Generation. Большинство этих блоков могут
контролировать количество выборок в каждом кадре (столбце), которые они генерируют, используя Выборок на кадр Параметр. Если вы установите этот параметр
до значения больше 1, блоки генерируют сигналы, которые имеют более 1
образец в каждом кадре (столбце). Для примеров, которые показывают, как генерировать сигналы
используя эти блоки, смотрите, Создают Сигналы для Основанной на выборке Обработки и Создают Сигналы для Основанной на Фрейме Обработки.
Для примеров, которые показывают, как генерировать сигналы
используя эти блоки, смотрите, Создают Сигналы для Основанной на выборке Обработки и Создают Сигналы для Основанной на Фрейме Обработки.
Вы можете дополнительно обрабатывать сигналы, генерируемые блоками, используя несколько блоки алгоритма обработки сигналов в DSP System Toolbox. Блоки обработки обрабатывают сигнал по одной выборке за раз. (обработка на основе сэмплов) или по одному кадру (обработка на основе кадров) в зависимости от Параметр обработки ввода .
Обработка на основе выборок и обработка на основе кадров
В среде Simulink вы можете выбрать обработку сигнала либо в режиме на основе сэмплов или в режиме на основе кадров. Однако в среде MATLAB Системные объекты всегда обрабатывают кадры. MATLAB не выполняет обработку на основе выборки.
В следующих двух разделах содержится более подробная информация об обработке на основе выборки и
обработка на основе кадров.
Что такое обработка на основе выборки?
При обработке на основе выборок блокирует сигналы обработки по одной выборке за раз. Каждый элемент входной сигнал представляет один образец в отдельном канале. Если входной сигнал является матрицей, каждый элемент соответствует одному и тому же времени. Например, из обработки на основе выборки В перспективе эта матрица 3 на 2 содержит первую выборку в каждой из шести независимых каналы.
Когда вы конфигурируете блок для выполнения выборочной обработки, блок интерпретирует скаляр вход как одноканальный сигнал. Точно так же блок интерпретирует M N матрица как многоканальный сигнал с M * N независимых каналов. Например, в обработка на основе выборки, блоки интерпретируют эту последовательность матриц 3 на 2 как шестиканальную сигнал.
Что такое обработка на основе кадров?
При обработке на основе фреймов блоки и Системные объекты обрабатывают данные в фреймах. Каждый кадр из
данные содержат образцы последовательных моментов времени, сложенные вместе. Каждый канал
представлен столбцом входного сигнала. Например, из каркасного
с точки зрения обработки, эта матрица 3 на 2 имеет два канала, каждый из которых содержит три
образцы.
Каждый кадр из
данные содержат образцы последовательных моментов времени, сложенные вместе. Каждый канал
представлен столбцом входного сигнала. Например, из каркасного
с точки зрения обработки, эта матрица 3 на 2 имеет два канала, каждый из которых содержит три
образцы.
Когда вы конфигурируете блок для выполнения обработки на основе кадров, блок интерпретирует M 1 вектор как одноканальный сигнал, содержащий M выборок на кадр. Точно так же блок интерпретирует M x N матрица как многоканальный сигнал с N независимых каналов и M выборок на канал. Например, при покадровой обработке блоки интерпретируют эту последовательность Матрицы 3 на 2 в виде двухканального сигнала с размером кадра 3,
Преимущества обработки на основе кадров
Обработка на основе кадров повышает производительность моделирования, поскольку
Алгоритм обрабатывает несколько образцов одновременно, уменьшая накладные расходы. Это также
более точно имитирует то, как потоки данных сигнала обрабатываются в режиме реального времени.
системы цифровой обработки сигналов, позволяющие более точно моделировать
поведение оборудования в реальном мире. Для примера, который сравнивает и показывает
Преимущества обработки на основе кадров в среде Simulink см. в разделе Сравнение показателей скорости в режиме обработки на основе кадров с помощью Simulink Profiler. К
выполнять обработку на основе кадров, у вас должна быть лицензия DSP System Toolbox.
Это также
более точно имитирует то, как потоки данных сигнала обрабатываются в режиме реального времени.
системы цифровой обработки сигналов, позволяющие более точно моделировать
поведение оборудования в реальном мире. Для примера, который сравнивает и показывает
Преимущества обработки на основе кадров в среде Simulink см. в разделе Сравнение показателей скорости в режиме обработки на основе кадров с помощью Simulink Profiler. К
выполнять обработку на основе кадров, у вас должна быть лицензия DSP System Toolbox.
Обратите внимание, что обработка на основе кадров приводит к некоторой задержке
в процесс из-за запаздывания при буферизации начального кадра. В
Однако во многих случаях вы можете выбрать размеры кадра, которые улучшат пропускную способность.
без создания неприемлемых задержек.