Краткая характеристика Пакета Control System Toolbox системы компьютерной математики (СКМ) MatLab
Другие предметы \ Математическое моделирование и автоматизированное проектирование технических систем
Страницы работы
8 страниц (Word-файл)
Посмотреть все страницы
Скачать файл
Фрагмент текста работы
Toolbox (CST), Simulink и Power System (PS), которые целесообразно применять при изучении и исследовании систем автоматического управления, используя на каждом этапе исследования сильные стороны одного из предложенных пакетов.
Пакет Control System Toolbox позволяет исследовать
линейные системы с привлечением современного математического аппарата. Он
представляет широкий набор процедур, осуществляющих анализ систем регулирования
с самых различных точек зрения и, прежде всего, определения откликов системы на
внешние воздействия, как во временной, так и в частотной областях.
Пакет Simulink позволяет осуществлять исследование (моделирование) линейных и нелинейных систем. Создание моделей в пакете Simulink основано на технологии Drag-and-Drop (схвати и перетащи). В качестве «кирпичиков» для построения моделей используются модули или блоки, хранящиеся в библиотеке Simulink. По сравнению с пакетом Control System Toolbox пакет Simulink работает с нелинейными системами и больше приближен к физическим моделям.
Пакет Power System
позволяет создавать виртуальные модели систем регулирования, что дает
возможность исследовать не только саму систему, но и отдельные аппараты, из
которых она состоит. Причем, детализация аппаратов настолько глубокая, что характеристики
математической модели в пакете Power System практически не отличаются от физических моделей.
2 Пакет Control System Toolbox
Все объекты, используемые в пакете Control System Toolbox, объединены в один класс – lti-объекты. В зависимости от вида математического описания lti-объекты, могут быть заданы либо парой многочленов числитель/знаменатель передаточной функции (команда tf), либо нулями, полюсами и обобщенным коэффициентом передачи (команда zpk), либо четверкой матриц (, , , ), задающих модель системы в пространстве состояния (команда ss или dss). Команда dss также описывает линейную систему четверкой матриц (, , , ), но используется тогда, когда уравнения переменных не разрешены относительно производных.
Указанные
процедуры позволяют создать непрерывные и дискретные модели. Для дискретных
моделей к числу входных параметров следует добавить значение параметра — шага дискретизации, а вводимые значения
коэффициентов должны задавать параметры дискретных передаточных функций (для
команд tf и zpk) либо матриц
конечно-разностных уравнений пространства состояния – при использовании команд ss и dss.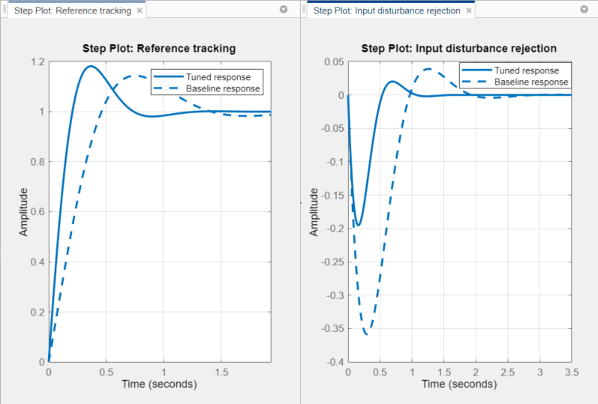
Известно, что z-передаточные функции могут быть представлены в двух видах. В теории управления используют переменную и располагают многочлены числителя и знаменателя в порядке убывания степени этой переменной. Например . При цифровой обработке сигналов предпочитают записывать эту передаточную функцию как функцию
Похожие материалы
Информация о работе
Скачать файл
Выбери свой ВУЗ
- АлтГТУ 419
- АлтГУ 113
- АмПГУ 296
- АГТУ 267
- БИТТУ 794
- БГТУ «Военмех» 1191
- БГМУ 172
- БГТУ 603
- БГУ 155
- БГУИР 391
- БелГУТ 4908
- БГЭУ 963
- БНТУ 1070
- БТЭУ ПК 689
- БрГУ 179
- ВНТУ 120
- ВГУЭС 426
- ВлГУ 645
- ВМедА 611
- ВолгГТУ 235
- ВНУ им.
 Даля 166
Даля 166 - ВЗФЭИ 245
- ВятГСХА 101
- ВятГГУ 139
- ВятГУ 559
- ГГДСК 171
- ГомГМК 501
- ГГТУ им. Сухого 4467
- ГГУ им. Скорины 1590
- ГМА им. Макарова 299
- ДГПУ 159
- ДальГАУ 279
- ДВГГУ 134
- ДВГМУ 408
- ДВГТУ 936
- ДВГУПС 305
- ДВФУ 949
- ДонГТУ 498
- ДИТМ МНТУ 109
- ИвГМА 488
- ИГХТУ 131
- ИжГТУ 145
- КемГППК 171
- КемГУ 508
- КГМТУ 270
- КировАТ 147
- КГКСЭП 407
- КГТА им.
 Дегтярева 174
Дегтярева 174 - КнАГТУ 2910
- КрасГАУ 345
- КрасГМУ 629
- КГПУ им. Астафьева 133
- КГТУ (СФУ) 567
- КГТЭИ (СФУ) 112
- КПК №2 177
- КубГТУ 138
- КубГУ 109
- КузГПА 182
- КузГТУ 789
- МГТУ им. Носова 369
- МГЭУ им. Сахарова 232
- МГЭК 249
- МАИ 144
- МАДИ 151
- МГИУ 1179
- МГОУ 121
- МГСУ 331
- МГУ 273
- МГУКИ 101
- МГУПИ 225
- МГУПС (МИИТ) 637
- МГУТУ 122
- МТУСИ 179
- ХАИ 656
- ТПУ 455
- НИУ МЭИ 640
- НМСУ «Горный» 1701
- ХПИ 1534
- НТУУ «КПИ» 213
- НУК им.
 Макарова 543
Макарова 543 - НВ 1001
- НГАВТ 362
- НГАУ 411
- НГАСУ 817
- НГМУ 665
- НГПУ 214
- НГТУ 4610
- НГУ 1993
- НГУЭУ 499
- НИИ 201
- ОмГТУ 302
- ОмГУПС 230
- СПбПК №4 115
- ПГУПС 2489
- ПГПУ им. Короленко 296
- ПНТУ им. Кондратюка 120
- РАНХиГС 190
- РОАТ МИИТ 608
- РТА 245
- РГГМУ 117
- РГПУ им.
 Герцена 123
Герцена 123 - РГППУ 142
- РГСУ 162
- «МАТИ» — РГТУ 121
- РГУНиГ 260
- РЭУ им. Плеханова 123
- РГАТУ им. Соловьёва 219
- РязГМУ 125
- РГРТУ 666
- СамГТУ 131
- СПбГАСУ 315
- ИНЖЭКОН 328
- СПбГИПСР 136
- СПбГЛТУ им. Кирова 227
- СПбГМТУ 143
- СПбГПМУ 146
- СПбГПУ 1599
- СПбГТИ (ТУ) 293
- СПбГТУРП 236
- СПбГУ 578
- ГУАП 524
- СПбГУНиПТ 291
- СПбГУПТД 438
- СПбГУСЭ 226
- СПбГУТ 194
- СПГУТД 151
- СПбГУЭФ 145
- СПбГЭТУ «ЛЭТИ» 379
- ПИМаш 247
- НИУ ИТМО 531
- СГТУ им.
 Гагарина 114
Гагарина 114 - СахГУ 278
- СЗТУ 484
- СибАГС 249
- СибГАУ 462
- СибГИУ 1654
- СибГТУ 946
- СГУПС 1473
- СибГУТИ 2083
- СибУПК 377
- СНАУ 567
- СумГУ 768
- ТРТУ 149
- ТОГУ 551
- ТГЭУ 325
- ТГУ (Томск) 276
- ТГПУ 181
- ТулГУ 553
- УкрГАЖТ 234
- УлГТУ 536
- УИПКПРО 123
- УрГПУ 195
- УГТУ-УПИ 758
- УГНТУ 570
- УГТУ 134
- ХГАЭП 138
- ХГАФК 110
- ХНАГХ 407
- ХНУВД 512
- ХНУ им.
 Каразина 305
Каразина 305 - ХНУРЭ 325
- ХНЭУ 495
- ЦПУ 157
- ЧитГУ 220
- ЮУрГУ 309
Медведев В.С. Потемкин В.Г. Control System Toolbox Matlab 5-x для студентов
- формат djvu
- размер 3.22 МБ
- добавлен 08 июля 2009 г.
ДИАЛОГ-МИФИ 1999г 287ст.
Модели линейных систем с постоянными параметрами.
Анализ LTI — объектов.
Синтез контуров управления с обратной связью.
Вычислительные проблемы при расчете систем управления.
Применения процедур автоматизированного проектирования.
Средства графического интерфейса пользователя для анализа LTI —
систем..jpg)
Похожие разделы
- Академическая и специальная литература
- Автоматизация
- Мехатроника
- Академическая и специальная литература
- Математика
- Оптимальное управление
- Академическая и специальная литература
- Транспорт
- Двигатели внутреннего сгорания (ДВС)
- Управление, регулирование и диагностика ДВС
- Прикладная литература
- Компьютерная литература
- Matlab / Simulink
Смотрите также
- формат pdf
- размер 641.
 23 КБ
23 КБ - добавлен 28 мая 2010 г.
Учебно-методические материалы по программе повышения квалификации «Информационные технологии и компьютерная математика». Нижний Новгород, 2006. — 135 с. В учебно-методических материалах изложен единый подход к синтезу регуляторов для динамических объектов, задаваемых дифференциальными или разностными уравнениями, который использует аппарат линейных матричных неравенств и комплекс прикладных программ MATLAB. Получены уравнения регуляторов по состо…
- формат pdf
- размер 3.23 МБ
- добавлен 15 августа 2011 г.
Павлодар: Кереку, 2011. — 318 с. Рассматриваются вопросы исследования линейных систем управления в MATLAB 7.11 (R2010b) с позиции пригодности программы для сопровождения стандартного учебного курса ТАУ на базе учебников СНГ, в том числе возможные ошибки или элементы, отсутствующие в MATLAB (критерии Гурвица, Рауса, Михайлова, D-разбиение и т. п.)
п.)
Практикум
- формат pdf
- размер 2.84 МБ
- добавлен 26 января 2009 г.
Лабораторный практикум по основам теории управления. Рассматриваются вопросы применения математического моделирования для решения задач оптимального управления динамическими процессами с использованием системы MATLAB 7.0 и пакета Simulink 5.0. Лабораторный практикум подготовлен на кафедре “Математическое обеспечение и применение ЭВМ” и предназначен для студентов специальности 23.01.05 при изучении дисциплины “Основы теории управления”.
- формат doc
- размер 2.19 МБ
- добавлен 18 ноября 2011 г.
Учебник. Днепропетровск. 2006. Национальный горный университет Украины. 243 с. Разделы: 1. Введение Кратко описать возможности применения пакета MatLab для исследования и изучения процессов в различных областях науки и техники, а в пакете Control System Toolbox приведены основные команды, позволяющие создавать модели линейных систем регулирования. 2. Модели в переменных состояния Описаны методики составления управления линейных систем в простран…
Днепропетровск. 2006. Национальный горный университет Украины. 243 с. Разделы: 1. Введение Кратко описать возможности применения пакета MatLab для исследования и изучения процессов в различных областях науки и техники, а в пакете Control System Toolbox приведены основные команды, позволяющие создавать модели линейных систем регулирования. 2. Модели в переменных состояния Описаны методики составления управления линейных систем в простран…
- формат doc
- размер 1.61 МБ
- добавлен 27 мая 2009 г.
Сборник заданий по дисциплине «Теория автоматического управления» и методические указания к их выполнению в среде «MATLAB» и «CLASSIC». Рассматривается содержание заданий для самостоятельной работы студентов по дисциплине и указания к их выполнению. Описана методика анализа систем автоматического регулирования с использованием программы CLASSIC. Приведена методика выполнения заданий с использованием пакета Simulink MATLAB и средств Linear Analysi…
Приведена методика выполнения заданий с использованием пакета Simulink MATLAB и средств Linear Analysi…
- формат doc
- размер 703 КБ
- добавлен 18 сентября 2011 г.
Конспект лекций для студентов специальностей I-53 01 03 «Автоматическое управление в технических системах» и I-53 01 07 «Информационные технологии и управление в технических системах». — Минск: Белорусский государственный университет информатики и радиоэлектроники, 2006. — 63с. Программные средства для расчетов систем управления Система Matlab Операционная среда Matlab Рабочая область Matlab Управление путями доступа М-файлы Некоторые особенност…
Практикум
- формат pdf
- размер 9.05 МБ
- добавлен
26 января 2012 г.
Методические указания к выполнению лабораторных работ / В.С. Щербаков, А.А. Руппель, И.В. Лазута, С.А. Милюшенко. — Омск: СибАДИ, 2010. — 49 с. Приведены основные теоретические положения по исследованию систем автоматического управления в программном продукте Matlab-Simulink, описана методика проведения лабораторных работ. Данные методические указания предназначены для студентов, выполняющих лабораторные работы, а также могут быть полезны при ку…
Практикум
- формат pdf
- размер 1.7 МБ
- добавлен 27 июня 2011 г.
Практикум / Е. М. Яковлева, В. С. Аврамчук, В. П. Казьмин. — Томск: Изд-во Томского политехнического университета, 2010. — 87 с. В лабораторном практикуме изложен основной материал курса лекций по теории управления. Практикум состоит из четырех глав. В первой главе рассматривается пакет прикладный программ MatLab, во второй пакет прикладных программ Control System Toolbox, в третьей главе рассмотрен пакет прикладных программ Simulink. В четве…
Практикум состоит из четырех глав. В первой главе рассматривается пакет прикладный программ MatLab, во второй пакет прикладных программ Control System Toolbox, в третьей главе рассмотрен пакет прикладных программ Simulink. В четве…
- формат pdf
- размер 17.12 МБ
- добавлен 04 октября 2011 г.
This is complete lections from University of California at Berkeley on the course named «Automatic control systems». Automatic control is the application of concepts derived from the research area of modern control theory. Automatic control is also a technology for application of control strategies. The implementing requires prior of analyzing and modeling of the subject to be controlled. Automatic control covers all kinds of technical implementa…
- формат pdf
- размер 8.23 МБ
- добавлен
24 января 2012 г.
Taylor & Francis, 1999 — Всего страниц: 325 Sliding Mode Control (SMC) is gaining increasing importance as a universal design tool for the robust control of linear and nonlinear systems. The strengths of sliding mode controllers result from the ease and flexibility of the methodology for their design and implementation. They provide inherent order reduction, direct incorporation of robustness against system uncertainties and disturbances, and…
Control System Toolbox
Проектирование и анализ систем управления
Получить бесплатную пробную версию
Посмотреть цены
Control System Toolbox™ предоставляет алгоритмы и приложения для систематического анализа, проектирования и настройки линейных систем управления. Вы можете задать свою систему как передаточную функцию, пространство состояний, усиление с нулевым полюсом или модель частотной характеристики. Приложения и функции, такие как график переходной характеристики и график Боде, позволяют анализировать и визуализировать поведение системы во временной и частотной областях.
Вы можете настроить параметры компенсатора, используя интерактивные методы, такие как формирование петли Боде и метод корневого геометрического места. Набор инструментов автоматически настраивает компенсаторы SISO и MIMO, включая ПИД-регуляторы. Компенсаторы могут включать в себя несколько настраиваемых блоков, охватывающих несколько контуров обратной связи. Вы можете настраивать контроллеры с запланированным усилением и задавать несколько целей настройки, таких как отслеживание уставки, подавление возмущений и запасы устойчивости. Вы можете проверить свой проект, проверив время нарастания, перерегулирование, время установления, запасы по усилению и фазе и другие требования.
Начало работы:
- Линейные модели
- Линейный анализ
- ПИД-регулятор
- Конструкция компенсатора
- Автоматическая настройка
- Планирование усиления
- Оценка состояния и проектирование LQG
- Дизайн управления в Simulink

2:00 Продолжительность видео 2 часа.
Что такое панель инструментов системы управления?
Бесплатные примеры
Примеры настройки ПИД-регулятора и код
См. примеры
Линейные модели
Создавайте линейные модели вашей системы управления, используя передаточную функцию, пространство состояний и другие представления. Дискретизируйте модели. Упростите модели, уменьшив их порядок.
Передаточные функции и модели в пространстве состояний
Создание линейных стационарных системных моделей с использованием передаточной функции или представлений в пространстве состояний. Управляйте ПИД-контроллерами и данными частотной характеристики. Модельные системы, которые являются SISO или MIMO, непрерывными или дискретными. Создавайте сложные блок-схемы, соединяя базовые модели последовательно, параллельно или с обратной связью.
Передаточные функции в MATLAB (4:15)
Моделирование системы управления с помощью объектов модели
Соединение моделей
Создание моделей с дискретным временем
Модели в пространстве состояний, часть 1: создание и анализ.
2:44 Продолжительность видео 2:44.
Модели в пространстве состояний, часть 1: создание и анализ
Дискретизация моделей
Используйте функции командной строки или интерактивные задачи Live Editor, чтобы передискретизировать модели динамических систем и преобразовывать модели между областями непрерывного и дискретного времени. Используйте удержание нулевого порядка, билинейный (Тастин), согласование с нулевым полюсом и другие методы преобразования скорости.
Дискретизация и передискретизация моделей
Дискретизация компенсатора
Дискретизация режекторного фильтра
Преобразование системы дискретного времени в непрерывное время
Изучите галерею (2 изображения)
Сокращение модели
Используйте приложение Model Reducer, задачу Live Editor или функции командной строки для интерактивного уменьшения порядка моделей объекта или контроллера при сохранении динамики, важной для вашего приложения. Используйте методы сбалансированного усечения, упрощения с нулевым полюсом или выбора режима.
Используйте методы сбалансированного усечения, упрощения с нулевым полюсом или выбора режима.
Уменьшите порядок моделей с помощью приложения Model Reducer
Сокращение модели сбалансированного усечения
Полюс-нулевое упрощение
Сокращение модели выбора режима
Сокращение порядка моделей с помощью приложения Model Reducer.4:57 Продолжительность видео 4:57.
Снижение порядка моделей с помощью приложения Model Reducer
Линейный анализ
Визуализация поведения системы во временной и частотной областях. Вычислите системные характеристики, такие как время нарастания, перерегулирование и время установления. Анализ стабильности системы.
Анализ во временной и частотной областях
Используйте приложение Linear System Analyzer для просмотра и сравнения временных и частотных характеристик нескольких моделей с использованием ступенчатой характеристики, импульсной характеристики, Боде, Николса, Найквиста, сингулярных значений и графиков с нулевым полюсом. Проверьте такие характеристики, как время нарастания, время установления и максимальный выброс.
Проверьте такие характеристики, как время нарастания, время установления и максимальный выброс.
Совместный анализ во временной и частотной областях
Характеристики во временной области на графиках отклика
Характеристики в частотной области на графиках отклика
Числовые значения характеристик системы во временной области
Передаточные функции в MATLAB.4:15 Продолжительность видео 4:15.
Передаточные функции в MATLAB
Анализ стабильности
Вычислите запас по усилению, запас по фазе и частоты кроссовера. Изучите положения полюсов и нулей динамических систем графически и численно. Вычислите коэффициент демпфирования, собственную частоту и постоянную времени полюсов линейной модели.
Оценка запасов по усилению и фазе
Полюс и ноль
Числовые значения характеристик частотной области модели SISO
Анализ систем управления с задержками
Вычисление запасов по усилению, запасов по фазе и частот кроссовера.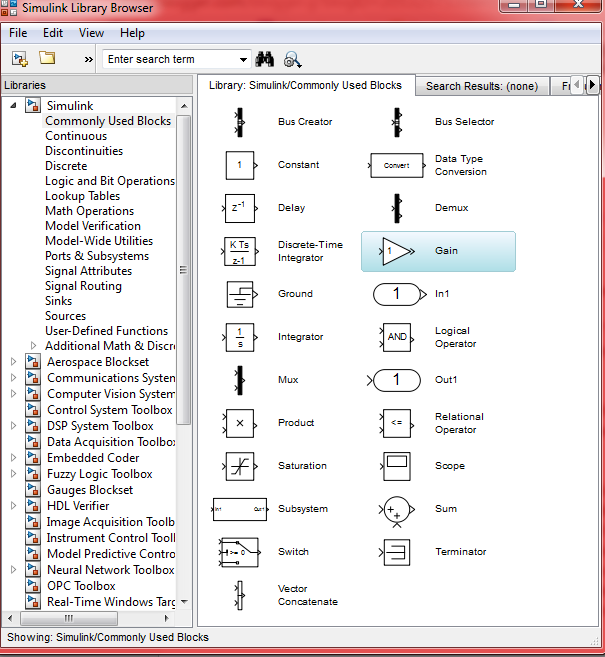
Пассивность и границы секторов
Вычисление различных мер пассивности для линейных стационарных систем. Анализируйте системы на пассивность и произвольные границы конического сектора.
Индексы пассивности
О границах секторов и индексах секторов
Абсолютная устойчивость квантованной системы
Контроль вибрации в гибкой балке
Изучить галерею (2 изображения)
ПИД-регулятор
Настройка усиления ПИД-регулятора с помощью инструментов автоматической и интерактивной настройки.
Настройка ПИД-регулятора
Используйте приложение PID Tuner, задачу Live Editor или функции командной строки для автоматической настройки коэффициентов усиления ПИД-регулятора, чтобы сбалансировать производительность и надежность. Задайте параметры настройки, такие как желаемое время отклика и запас по фазе. Настройте непрерывные или дискретные ПИД-регуляторы.
Проект ПИД-регулятора для быстрого отслеживания задания
Настройте ПИД-регулятор для поддержки отслеживания задания или подавления помех (ПИД-тюнер)
Проектирование каскадной системы управления с ПИ-контроллерами
Управление процессами с длительным временем простоя: предиктор Смита
Проект ПИД-регулятора с набором инструментов системы управления.
2:22 Продолжительность видео 2:22.
PID Control Design with Control System Toolbox
Интерактивная оценка динамики объекта
Создайте модель объекта на основе измеренных данных ввода-вывода непосредственно в приложении PID Tuner с помощью System Identification Toolbox™. В качестве альтернативы используйте Live Editor для определения динамики объекта и настройки ПИД-регулятора.
Интерактивный дизайн элементов управления с использованием задач Live Editor (4:56)
Интерактивная оценка параметров предприятия на основе данных ответов
Настройте ПИД-регулятор на основе измеренных данных предприятия с помощью задач Live Editor
Спроектируйте ПИД-регулятор, используя смоделированные данные ввода-вывода
Настройка ПИД-регулятора на основе измеренных входных-выходных данных.3:52 Продолжительность видео 3:52.
Настройка ПИД-регулятора на основе измеренных данных ввода-вывода
ПИД-регулятор с двумя степенями свободы
Настройка ПИД-регуляторов с двумя степенями свободы (2-DOF). Используйте ПИД-регулятор с 2 степенями свободы вместо ПИД-регулятора с 1 степенями свободы, чтобы добиться лучшего подавления возмущений без значительного увеличения перерегулирования при отслеживании уставки.
Используйте ПИД-регулятор с 2 степенями свободы вместо ПИД-регулятора с 1 степенями свободы, чтобы добиться лучшего подавления возмущений без значительного увеличения перерегулирования при отслеживании уставки.
Настройте ПИД-регулятор 2-DOF (ПИД-тюнер)
Настройка ПИД-регулятора 2-DOF (командная строка)
Типы ПИД-регуляторов для настройки
Многоконтурное ПИ-управление роботом-манипулятором
Настройка ПИД-регулятора с 2 степенями свободы (сплошная линия) и сравнение его с ПИД-регулятором с 1 степенями свободы (пунктирная линия) в приложении PID Tuner.
Разработка компенсатора
Интерактивное проектирование и анализ систем управления.
Интерактивное проектирование с корневым расположением и диаграммами Боде
Используйте приложение Control System Designer для интерактивного проектирования и анализа систем управления SISO. Графически настраивайте общие компоненты управления, такие как PID, сети опережения/запаздывания и режекторные фильтры, используя корневую траекторию, диаграммы Боде и диаграммы Николса.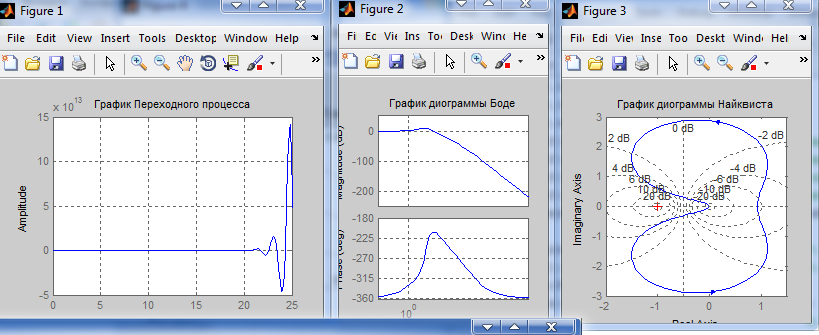
Начало работы с Control System Designer
Схема диаграммы Боде
Дизайн корневого локуса
Николс Дизайн сюжета
Проектирование системы управления с помощью приложения Control System Designer.3:52 Продолжительность видео 3:52.
Проектирование системы управления с помощью приложения Control System Designer
Мониторинг реакции с обратной связью
Визуализируйте отклики замкнутого и разомкнутого контура с переходной характеристикой, графиками Найквиста и другими графиками, которые динамически обновляются по мере настройки контроллера. Укажите и оцените проектные требования во временной и частотной областях, такие как время нарастания, максимальный выброс, запас по усилению и запас по фазе.
Анализ проектов с использованием графиков отклика
Дизайн внутренней модели контроллера для завода с химическими реакторами
Проект компенсатора для набора моделей установок
Нелинейное управление объектом в различных рабочих точках.
4:22 Продолжительность видео 4:22.
Нелинейное управление предприятием в различных рабочих точках
Многоконтурная конструкция
Настройка контроллеров, состоящих из нескольких контуров SISO. Последовательно закрывайте циклы SISO, визуализируйте взаимодействие циклов и итеративно настраивайте каждый цикл для оптимизации общей производительности.
Разработка многоконтурной системы управления
Каскадная многоконтурная схема обратной связи
Посмотреть галерею (3 изображения)
Автоматическая настройка
Автоматическая настройка систем управления в соответствии с требованиями проектирования высокого уровня.
Контуры SISO и MIMO
Используйте приложение Control System Tuner или функции командной строки для моделирования и настройки архитектур систем управления SISO или MIMO с помощью простых настраиваемых элементов, таких как коэффициенты усиления, ПИД-регуляторы или фильтры младших разрядов. Совместная настройка нескольких контуров в многоконтурной системе управления.
Совместная настройка нескольких контуров в многоконтурной системе управления.
Настройте систему управления с помощью программы настройки системы управления
Цифровое управление напряжением силового каскада
Настройка многоконтурных систем управления
Управление перевернутым маятником на тележке
Автоматическая настройка системы управления полетом вертолета.4:56 Продолжительность видео 4:56.
Автоматическая настройка системы управления полетом вертолета
Цели во временной и частотной областях
Укажите и визуализируйте требования к настройке, такие как характеристики отслеживания, подавление помех, усиление шума, расположение полюсов с обратной связью и запасы устойчивости. Автоматически настраивайте параметры контроллера так, чтобы они удовлетворяли обязательным требованиям (конструктивным ограничениям) и наилучшим образом соответствовали оставшимся требованиям (целям).
Многоконтурное управление вертолетом
MIMO-управление дизельным двигателем
Автопилот с фиксированной конструкцией для пассажирского самолета
Оптимизация системы LTI для соответствия требованиям частотной области
Автоматическая настройка многопараметрического контроллера дистилляционной колонны.
5:04 Продолжительность видео 5:04.
Автоматическая настройка многопараметрического контроллера дистилляционной колонны
Настройка по набору моделей установок
Разработайте контроллер, устойчивый к изменениям в динамике объекта из-за изменений параметров, изменений рабочих условий и отказов датчика или исполнительного механизма.
Настройка для нескольких значений параметров объекта
Отказоустойчивое управление пассажирским самолетом
Конструкция компенсатора для набора моделей установок
Мультимодельный дизайн управления
Разработка контроллера, устойчивого к изменениям параметров установки.
Планирование усиления
Разработка и настройка регуляторов усиления для нелинейных или изменяющихся во времени объектов.
Контроллеры с запланированным усилением в Simulink
Смоделируйте системы управления с запланированным усилением в Simulink ® , используя такие блоки, как переменный ПИД-регулятор, переменная передаточная функция, переменный режекторный фильтр и переменный фильтр нижних частот.
Моделируйте системы управления по расписанию усиления в Simulink
Реализуйте ПИД-регуляторы с запланированным усилением
Регулируемое усиление химического реактора
Управление угловой скоростью в автопилоте HL-20
Библиотека для моделирования регуляторов с регулируемым коэффициентом усиления в Simulink.
Настройка поверхности усиления
Автоматическая настройка коэффициентов поверхности усиления в соответствии с требованиями к производительности во всем рабочем диапазоне системы и достижение плавных переходов между рабочими точками. Укажите требования, которые зависят от условий эксплуатации. Проверьте результаты настройки во всем рабочем диапазоне вашей конструкции.
Проектное семейство ПИД-регуляторов для нескольких рабочих точек
Настройка трехконтурного автопилота с запланированным усилением
Рабочий процесс MATLAB для настройки автопилота HL-20
Изменение требований с рабочим условием
Получите планирование ПИД-регуляторов.
4:51 Продолжительность видео 4:51.
Планирование усиления ПИД-регуляторов
Оценка состояния и проектирование LQG
Используйте методы проектирования управления в пространстве состояний, такие как LQG/LQR и алгоритмы размещения полюсов. Наблюдатели проектирования, включая линейные и нелинейные фильтры Калмана.
LQR/LQG и размещение полюсов
Разработка непрерывных и дискретных линейно-квадратичных регуляторов (LQR) и линейно-квадратично-гауссовских (LQG) регуляторов. Вычислите матрицы усиления обратной связи, чтобы разместить полюса с обратной связью в нужных местах.
Пространство состояний, часть 4: что такое оптимальное управление LQR? (17:23)
Управление двигателем постоянного тока
Контроль толщины стальной балки
Государственное пространство, часть 2: размещение полюса (14:54)
Модели в пространстве состояний, часть 2: проектирование элементов управления. 5:57
Продолжительность видео 5:57.
Модели в пространстве состояний, часть 2: проектирование систем управления
Фильтры Калмана
Разработка и моделирование линейных стационарных и изменяющихся во времени фильтров Калмана. Сгенерируйте код C/C++ для этих фильтров, используя MATLAB Coder™ и Simulink Coder™.
Конструкция фильтра Калмана
Оценка состояния с использованием изменяющегося во времени фильтра Калмана
Понимание фильтров Калмана, часть 6: как использовать фильтр Калмана в Simulink.8:58 Продолжительность видео 8:58.
Понимание фильтров Калмана, часть 6: как использовать фильтр Калмана в Simulink
Nonlinear State Estimators
Оценка состояний нелинейных систем с использованием расширенных фильтров Калмана, фильтров Калмана без запаха или фильтров частиц в MATLAB ® и Simulink. Сгенерируйте код C/C++ для этих фильтров с помощью MATLAB Coder и Simulink Coder.
Нелинейная оценка состояния с использованием фильтра Калмана без запаха и фильтра частиц
Оценка состояний нелинейной системы с несколькими многоскоростными датчиками
Оценка параметра и состояния в Simulink Используя блок фильтра частиц
Понимание фильтров Калмана, часть 7: как использовать расширенный фильтр Калмана в Simulink.
5:34 Продолжительность видео 5:34.
Понимание фильтров Калмана, часть 7: как использовать расширенный фильтр Калмана в Simulink
Проектирование управления в Simulink
Анализ и настройка систем управления, смоделированных в Simulink.
Линейный анализ
Используйте инструмент линейного анализа в Simulink Control Design™ для линеаризации моделей Simulink. Вычислите временные и частотные характеристики линеаризованных моделей, используя переходную характеристику, импульсную характеристику, Боде, Николса, Найквиста, сингулярное значение и графики с нулевым полюсом.
Линеаризуйте модель Simulink в рабочей точке модели
Обрезка и линеаризация планера
Линеаризация пневматической системы на моментальных снимках моделирования
Пакетная линеаризация модели для изменений значений параметров с использованием инструмента линейного анализа
Обрезка и линеаризация в пакетном режиме.
5:20 Продолжительность видео 5:20.
Обрезка и линеаризация в пакетном режиме
Compensator Design
Графически настройте контуры обратной связи SISO, смоделированные в Simulink, с помощью Simulink Control Design. Создавайте контроллеры с помощью интерактивных графических редакторов Bode, root locus и Nichols для добавления, изменения и удаления полюсов контроллера, нулей и коэффициентов усиления.
Контрольное отслеживание двигателя постоянного тока с изменениями параметров
Одноконтурный компенсатор обратной связи/предфильтра
Спроектируйте компенсатор с помощью автоматизированной настройки ПИД-регулятора и графического дизайна Боде
Триммер, линеаризация и дизайн управления для самолета.4:32 Продолжительность видео 4:32.
Обрезка, линеаризация и проектирование управления для самолета
Настройка компенсатора
Автоматическая настройка усиления ПИД-регуляторов, смоделированных в Simulink.![]() Используйте приложение Control System Tuner или инструменты командной строки в Simulink Control Design для автоматической настройки коэффициентов усиления и динамики элементов управления, распределенных по любому количеству контуров обратной связи в Simulink.
Используйте приложение Control System Tuner или инструменты командной строки в Simulink Control Design для автоматической настройки коэффициентов усиления и динамики элементов управления, распределенных по любому количеству контуров обратной связи в Simulink.
Контрольное отслеживание двигателя постоянного тока с изменением параметров (3:53)
Настройка ПИД-регулятора в Simulink
Настройте ориентированные на поле контроллеры с помощью SYSTUNE
Настройка многоконтурных систем управления
Автоматическая настройка многоконтурного контроллера двигателя постоянного тока.2:47 Продолжительность видео 2:47.
Автоматическая настройка многоконтурного контроллера двигателя постоянного тока
Ресурсы продукта:
Документация Примеры Функции Блоки Технические статьи Истории пользователей Требования к продукту Примечания к выпуску Видео и вебинары
Что дальше?
Бесплатные примеры
Примеры настройки ПИД-регулятора и код
Бесплатные примеры
Спроектируйте и симулируйте алгоритмы фильтра Калмана
Особенности выпуска
Что нового в последней версии MATLAB и Simulink
Выберите веб-сайт
Выберите веб-сайт, чтобы получить переведенный контент, где он доступен, и увидеть местные события и
предложения. В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
В зависимости от вашего местоположения мы рекомендуем вам выбрать: .
Вы также можете выбрать веб-сайт из следующего списка:
Европа
Обратитесь в местный офис
Набор инструментов системы управления8.3 | Контакты МАТЕМАТИКА
- Индустри Плаза
- Прикладное программное обеспечение
- Программное обеспечение для управления
 org/ListItem»>
Другое программное обеспечение
org/ListItem»>
Другое программное обеспечение…
- Панель инструментов системы управления 8.3
Control System Toolbox 8.3 THE MATHWORKS
Другое программное обеспечение
Запросить предложение Получить документацию Свяжитесь с поставщиком
ДРУГИЕ ПРОДУКТЫ ДРУГОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ОТ MATHWORKS
Панель инструментов нейронной сети 6. 0.2
0.2
Запросить цену
Набор инструментов для обработки изображений 6.3
Запросить цену
Mapping Toolbox 2.7.2
Запросить цену
Набор инструментов для управления прибором 2. 8
8
Запросить цену
Модель PolySpace Link TL 5.3
Запросить цену
PolySpace UML Link RH (для Telelogic Rhapsody) 5.3
Спросите цену
Ознакомьтесь со всеми продуктами из другого программного обеспечения от THE MATHWORKS.
ПОЛЬЗОВАТЕЛИ ИНТЕРНЕТА ТАКЖЕ КОНСУЛЬТИРУЮТСЯ ПО КАТЕГОРИИ ДРУГОЕ ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
VoluPack — Корругаторы
Запросить цену
Программное обеспечение для составления рецептур FormWeigh.