Первая позиционная задача — пересечение прямой и плоскости. Занятие 7 | чертежные задачки
§ 7. Первая позиционная задача. Построение точки пересечения прямой линии с плоскостью
Задача 7.1. Построить точку пересечения прямой п с плоскостью треугольника АВС. Определить видимость прямой п. (Рисунок 101)
Рисунок 101. Условие задачи 7.1.Решение.
Задачи данного типа решаются в три этапа:
1. Проведение через заданную прямую вспомогательной проецирующей плоскости и нахождение линии пересечения этой вспомогательной плоскости с заданной плоскостью.
2. Построение точки пересечения прямой и плоскости, опираясь на результат этапа 1..
3. Определение видимости прямой.
1. Для решения задачи применяют проецирующую плоскость, проходящую через заданную прямую. Заключим прямую п в горизонтально проецирующую плоскость. Данная плоскость перпендикулярна горизонтальной плоскости проекций, на которой она отобразится в виде прямой, совпадающей с проекцией п1 . Обозначим ее утолщенной линией и буквами ГП1 (рисунок 102).
Обозначим ее утолщенной линией и буквами ГП1 (рисунок 102).
ГП пересекает стороны ΔАВС в точках 1 и 2: в точке 1 – со стороной АВ, а в точке 2 – со стороной ВС. Покажем проекции этих точек на эпюре (см. рис. 102).
Можно утверждать, что ГП, проведенная через прямую п пересекает плоскость треугольника АВС по прямой, проходящей через точки 1 и 2. На горизонтальной проекции эта прямая совпадает с прямой п (как и все другие прямые, лежащие в плоскости ГП), а на фронтальной проекции мы получаем эту прямую, соединив точки 12 и 22.
Рисунок 102.2. На пересечении проекций прямых п2 и (12 — 22) построим точку К2, которая является фронтальной проекцией точки К — точки пересечения прямой п и прямой, проходящей через точки 1 и 2. Найдем проекцию К1, проведя линию связи с фронтальной проекции на горизонтальную до пересечения с проекцией прямой п1 (рисунок 103).
Рисунок 103.3. Чтобы определить видимость прямой п, рассмотрим конкурирующие точки (рисунок 104)
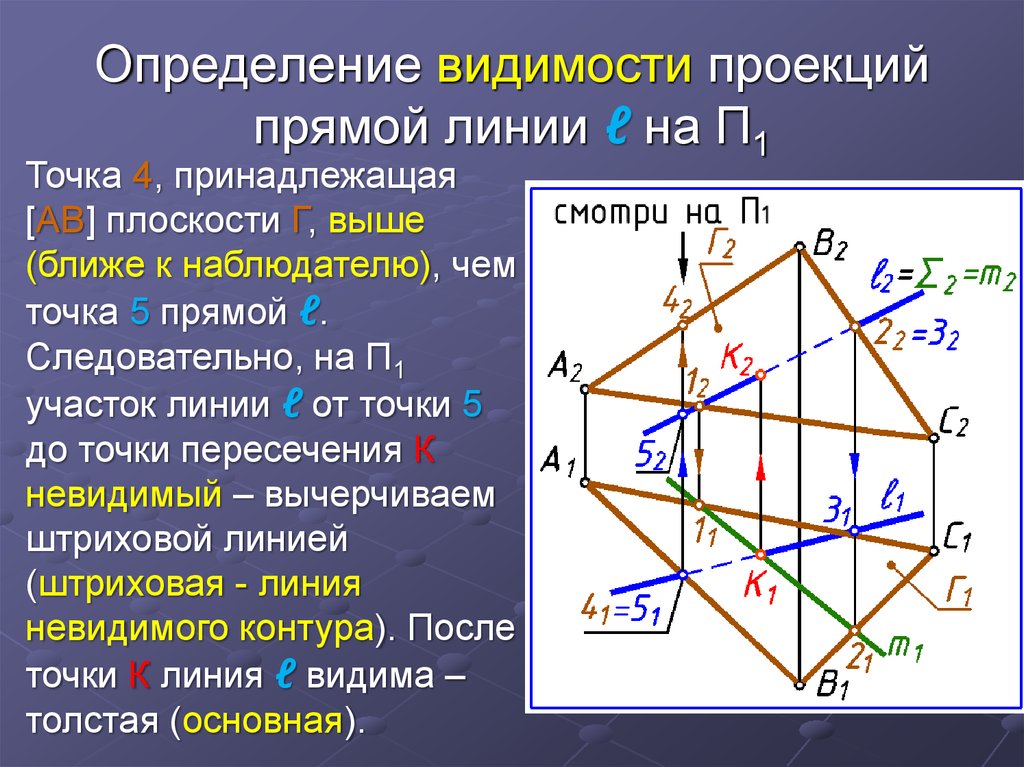
Рисунок 104.Конкурирующими называются две точки, одна из проекций которых совпадает. На горизонтальной проекции рассмотрим конкурирующие точки, лежащие на стороне АВ (проекция А1В1) и прямой п (проекция п1). Их горизонтальная проекция совпадает – это точка 11. Если мы посмотрим на фронтальную проекцию эпюра, направив взгляд по проекционной линии связи, то увидим, что Прямая АВ лежит выше, чем прямая п, а это значит, что на горизонтальной проекции сторона А1В1 перекрывает прямую п1 , которая после пересечения с А1В1 становится невидимой. Далее, в точке К1 прямая как бы «протыкает» плоскость треугольника и становится видимой.
На фронтальной проекции также рассмотрим конкурирующие точки на прямой АВ (проекция А2В2) и прямой п (проекция п2). Направляем взгляд по стрелке вниз (рис. 104) и видим, что точка, расположенная на прямой п ближе к нам (ниже на эпюре), поэтому прямая п2 в месте пересечения со стороной А2В2 видимая, а после прохождения точки К2 становится невидимой.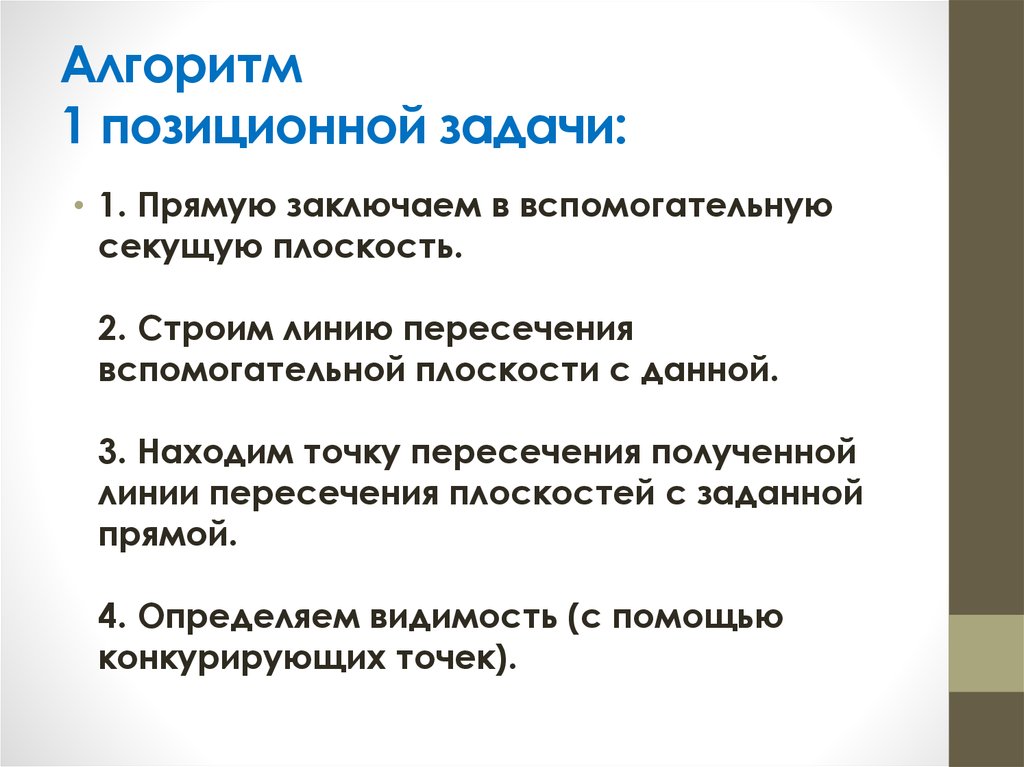
Окончательно решение задачи выглядит так, как показано на рисунке 105.
Рисунок 105. Решение задачи 1.Задача 7. 2. Построить точку пересечения прямой а с плоскостью, заданной параллельными прямыми m и n. Определить видимость прямой а. (Рисунок 106).
Рисунок 106. Исходные данные задачи 7.2.Решение:
Данную задачу решаем аналогично задаче 1.Для разнообразия вместо горизонтально проецирующей плоскости проведем фронтально проецирующую – результат решения от этого не изменится. Заключим прямую а в фронтально-проецирующую плоскость ФП, обозначив ее на эпюре как ФП2.
Плоскость ФП, проведенная через прямую а пересекает заданную плоскость по прямой, проходящей через точки 1 и 2. фронтальной проекции эта прямая совпадает с прямой п, а на горизонтальной проекции мы получаем эту прямую, соединив точки 12 и 21. Получив на эпюре точку N1 от пересечения прямой (11-21) и а1, «поднимаем» от нее линию связи на фронтальную проекцию и получаем на проекции а2 точку N2.
Видимость прямой определяем методом конкурирующих точек. Решение задачи представлено на рисунке 107.
Рисунок 107. Решение задачи 7.2.Задача 7.3. Построить точку пересечения прямой l с плоскостью α, заданной следами . Определить видимость прямой l. (Рисунок 108).
Рисунок 108. Исходные данные к задаче 7.3.Решение.
Заключим прямую l в горизонтально-проецирующую плоскость ГП и найдем точки пересечения этой плоскости со следами заданной плоскости α. Точка 1 – это точка пересечения ГП с горизонтальным следом α1, а точка 2 – это точка пересечения ГП с фронтальным следом α2 (рисунок 109).
Поскольку следы плоскости – это прямые, принадлежащие плоскостям проекций и самой плоскости, то нахождение проекций точек пересечения их с вспомогательной плоскостью ГП не представляет затруднений (см. рис. 109).
Рисунок 109. Решение задачи 7.3.Также как и в двух предыдущих задачах, проведем прямую (1-2), являющуюся результатом пересечения ГП и плоскости α. Фронтальная проекция этой прямой представлена отрезком [12-22], а ее горизонтальная проекция совпадает с проекцией l1. Теперь мы можем получить проекцию М2, и «опустив» ее на плоскость Н получаем проекцию М1. Точка пересечения Прямой l и плоскости α найдена.
Фронтальная проекция этой прямой представлена отрезком [12-22], а ее горизонтальная проекция совпадает с проекцией l1. Теперь мы можем получить проекцию М2, и «опустив» ее на плоскость Н получаем проекцию М1. Точка пересечения Прямой l и плоскости α найдена.
Видимость в данном случае легко определить интуитивно, поскольку плоскость задана следами. Применение метода конкурирующих точек также дает верное решение.
Упражнение 7.
Построить точку пересечения прямой l с плоскостью, заданной пересекающимися прямыми а и b. Определить видимость прямой l. (Рисунок 110)
Рисунок 110. Задание к упражнению 7.Основная позиционная задача — Большая Энциклопедия Нефти и Газа, статья, страница 1
Основная позиционная задача
Cтраница 1
Основные позиционные задачи решают вопросы относительного положения в пространстве точек, прямых и плоскостей по их комплексному чертежу. Они могут быть разделены на шесть типов.
[1]
Они могут быть разделены на шесть типов.
[1]
Простейшей и основной позиционной задачей, входящей в виде элемента в решение любой более сложной задачи ( позиционной или метрической), является построение проекций точки, принадлежащей поверхности. [2]
Рассмотрим две основные позиционные задачи: 1) определение точки пересечения прямой с плоскостью и 2) определение прямой пересечения двух плоскостей. [3]
Аналитическое решение второй основной позиционной задачи реализует лишь способ плоскостей уровня. Это объясняется, во-первых, простотой вычислений при реализации способа плоскостей уровня, а во-вторых, необходимостью выполнения ряда вспомогательных аналитических выкладок при реализации способа сфер, и, конечно, ограниченностью области их применения. [4]
Прежде чем решать две основные позиционные задачи: пересечение прямой общего положения с плоскостью общего положения и двух плоскостей общего положения, рассмотрим некоторые вспомогательные ( частные) задачи. [5]
[5]
Рассмотренные вопросы позволяют разрешить две основные позиционные задачи. [6]
Рассмотрим решение на аксонометрическом чертеже основной позиционной задачи: пересечение прямой с плоскостью. [7]
Эту залачу принято называть второй основной позиционной задачей. Она решается внесением вспомогательных поверхностей Г, называемых посредниками, При выборе посредников исходят из то от чтобы они пересекали данные поверхности по графически простым линиям — прямым и окружностям. [9]
Какие задачи называются позиционными и как решаются две основные позиционные задачи. [10]
В развитии вольной перспективы значительную роль сыграли английский математик Тейлор ( 1685 — 1731), разработавший способы решения основных позиционных задач и определения затем свойств оригинала по его перспективному изображению, а также немецкий геометр Ламберт ( 1728 — 1777), применивший метод перспективы к графическому решению важных задач элементарной геометрии.
Алгоритмы решения задач для определения линии пересечения двух поверхностей ( см. § 43, табл. 8) и нахождения точек встречи линии е поверхностью ( см. § 53, табл. 9), составленные для ортогональных проекций, остаются без изменения при решении аналогичных задач в аксонометрических проекциях. Рассмотрим решение основных позиционных задач: определение точки встречи прямой с плоскостью и построение линии пересечения двух поверхностей. [12]
Рассмотрим решение основных позиционных задач — определение точки встречи прямой с плоскостью и построение линии пересечения двух поверхностей.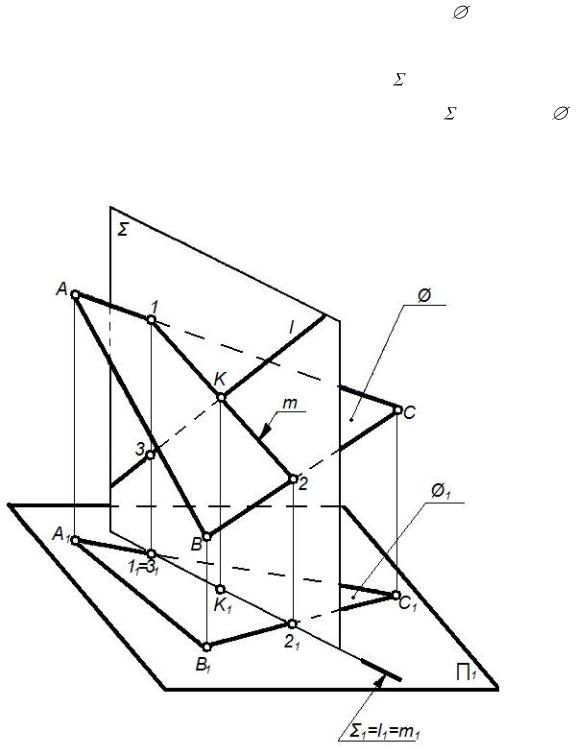
Прямая пересекает плоскость, если имеет с ней одну общую точку. Построение точки пересечения прямой с плоскостью является одной из основных позиционных задач. [14]
Страницы: 1
Начертательная геометрия: решение задач 1 курса
Предмет начертательной геометрии
Начертательная геометрия – одна из фундаментальных дисциплин инженерного образования, где пространственные фигуры изучаются по их проекционным изображениям. Основной целью данной дисциплины является разработка методов изображения геометрических фигур на плоскости или на другой поверхности и дальнейшее их применение при решении задач.
Методы начертательной геометрии позволяют с высокой степенью точности решать математические задачи графически. В изобразительном искусстве, архитектуре и строительстве метод проекций позволяет получать наглядные изображения создаваемых объектов.
Задачи начертательной геометрии решаются графическим путем. Знание базовых правил и теорем позволяет решать сложные задания путем расчленения процесса их решения на ряд элементарных однотипных операций. Основополагающей операцией, которую приходится выполнять в процессе решения, является определение точки пересечения двух линий.
Начертательная геометрия является одним из лучших средств развития у человека пространственного воображения, логического мышления, без которых сложно представить любое инженерное творчество.
Основные виды задач
Метрическими называются задачи, в которых требуется определить действительные значения величин плоских фигур, углов, отрезков, расстояний или построить геометрические объекты заданных размеров.
В общем случае геометрические фигуры произвольно расположены по отношению к плоскостям проекций и проецируются на эти плоскости с искажением их линейных и угловых величин. Чтобы определить натуральную величину любой плоской фигуры, ее нужно перевести в положение, при котором она будет параллельна одной из плоскостей проекций.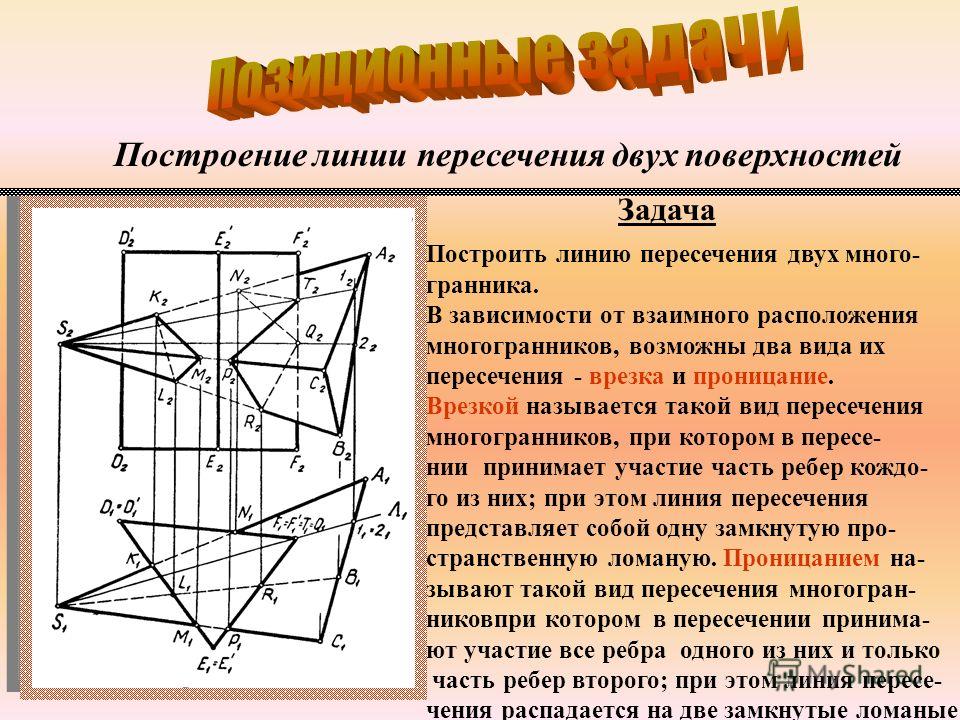
Позиционными называются задачи, в которых требуется определить взаимное положение геометрических объектов – построить линию их пересечения или определить принадлежность точки некоторой фигуре. Для решения позиционных задач обычно используют ряд вспомогательных поверхностей. Их выбирают таким образом, чтобы они пересекались с заданными фигурами по линиям, которые просты для построения – например, по прямым и окружностям.
В начертательной геометрии существуют базовые задачи, без освоения которых невозможно дальнейшее изучение предмета. Это построение ортогональных проекций точек и поверхностей, определение следов прямых и плоскостей. Владение методами преобразования проекций позволяет самостоятельно анализировать и значительно упрощать решение многих задач.
Иллюстрированный самоучитель по созданию чертежей › Позиционные задачи › Пересечение прямой с плоскостью [страница — 78] | Самоучители по инженерным программам
Пересечение прямой с плоскостью
Прямая пересекает плоскость в одной точке.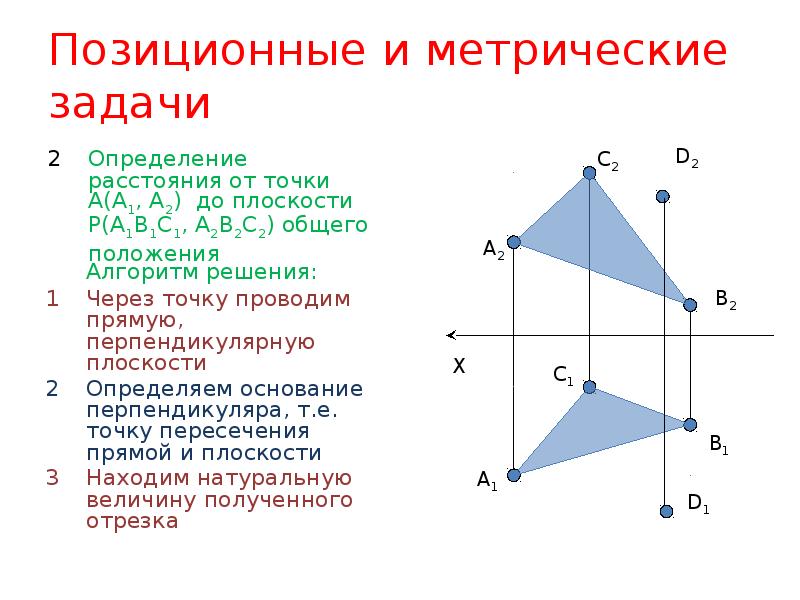 21.
21.
Рис. 119
Рис. 120
Рис. 121
Для получения фронтальной проекции линии l построим фронтальные проекции точек 1 и 2, соединив которые, получим фронтальную проекцию m2. В пересечении фронтальных проекций прямых т и l получим фронтальную проекцию точки К, принадлежащей и прямой l, и прямой т, лежащей в плоскости Sum. Значит, точка К и принадлежит плоскости Sum, и является точкой пересечения прямой l с плоскостью Sum.
Видимость прямой и плоскости относительно горизонтальной плоскости проекций определяется с помощью горизонтально конкурирующих точек 2 и 3, а видимость относительно фронтальной плоскости проекции – с помощью фронтально конкурирующих точек 3 и 4.
Если плоскость занимает частное положение, то одна проекция точки пересечения прямой с плоскостью определяется сразу в пересечении вырожденной проекции плоскости с соответствующей проекцией прямой (рис. 119, б).
Если прямая пересекает плоскость под прямым углом, то на комплексном чертеже проекции этой прямой располагаются перпендикулярно проекциям соответствующих линий уровня плоскости на основании теоремы о проецировании прямого угла (см. § 29).
На рис. 120 построены проекции основания М перпендикуляра 
Если прямая пересекает плоскость в бесконечности, то имеет место параллельность прямой с плоскостью. На рис. 121 построена прямая т, проходящая через точку N u параллельная плоскости треугольника KLM. На комплексном чертеже параллельность прямой и плоскости доказывается тем, что m1 || а1 и m2 || а2; a ~ KLM.
Основные позиционные задачи
Содержание:
Основные позиционные задачи
- Основная цель 1. Проблема положения — это задача, которая определяет взаимное расположение различных геометрических фигур. Эти задачи включают в себя взаимосвязанные задачи, такие как получение точек на линии или поверхности, рисование линий на поверхности или поверхности с помощью линии данных и проблемы пересечения, среди прочего.
- Некоторые вопросы определения местоположения были рассмотрены выше.
 Например, в § 5 и 7 рассмотрена взаимосвязь между точками и прямыми линиями, а в § 6 — взаимосвязь между точками и плоскостями. В этом разделе мы рассмотрим все обратные основные вопросы позиционирования. Эта проблема определяет относительное положение точек, линий и плоскостей (и относительно наблюдателя). 2.
Например, в § 5 и 7 рассмотрена взаимосвязь между точками и прямыми линиями, а в § 6 — взаимосвязь между точками и плоскостями. В этом разделе мы рассмотрим все обратные основные вопросы позиционирования. Эта проблема определяет относительное положение точек, линий и плоскостей (и относительно наблюдателя). 2.
Обратите внимание, что эти позиционные задачи являются одной из прямых позиционных задач. Людмила Фирмаль
Относительное положение двух точек. Две точки в пространстве могут совпадать или не совпадать. Если точки данных A и B совпадают, их горизонтальная и передняя проекции совпадают. i4t = £ j и A2 до Br. Если данные в точках A и B не совпадают, их горизонтальные и передние проекции должны различаться (рисунок 36), или не должен совпадать хотя бы один набор проекций (рисунки 37 и 38). В? о AGB, в Рисунок 37 Рисунок 36 Рисунок 38
Если точка A и точка B не совпадают, проблема заключается в том, как они расположены относительно друг друга (и наблюдателя). Посмотри на фото. Как показано на рисунке 36, легко определить, что точки A и B. не совпадают. Точка A имеет одну единицу на левой стороне точки B, точку b возле точки B и единицу c ниже точки B. На фиг.37 показаны горизонтально конкурирующие точки A и B, на фиг.37, 38 — точки, конкурирующие спереди.
Посмотри на фото. Как показано на рисунке 36, легко определить, что точки A и B. не совпадают. Точка A имеет одну единицу на левой стороне точки B, точку b возле точки B и единицу c ниже точки B. На фиг.37 показаны горизонтально конкурирующие точки A и B, на фиг.37, 38 — точки, конкурирующие спереди.
Из двух точек A и B, конкурирующих горизонтально (рис. 37), мы видим, что точка A находится на единицу выше точки B. Говорят, что точка A находится выше точки B, или точка B находится ниже точки A. В поле II точка A отображается, а точка B не отображается. Из двух конкурирующих точек A и B (см. Рисунок 38) точка A находится на расстоянии b от точки B.
То есть точка A находится за точкой B или точка B находится перед точкой A. B отображается, а точка A скрыта. 3. Относительное положение точки и линии. Точки могут быть на прямой или от прямой линии. Если точка находится на определенной линии / на, проекция должна быть на проекции линии с тем же именем, как показано в §5.
Если данная точка находится за пределами линии, по крайней мере один из выступов в этой точке не должен находиться на одной и той же проекции линии. Если только прямая, определенная в системе проекционной плоскости Pn P2, не является профилем 1, то применяется обратное утверждение. Относительное положение точки и линии профиля дополнительно учитывается.
Вы можете видеть, что точка A находится на линии /, а точки B, C и D находятся вне линии /. Кроме того, учитывая поле P2, точка B находится выше точки линии /, поэтому точка B находится выше линии / (прямая проекция этой точки на линии I отмечена крестиком сима). Аналогично, при рассмотрении поля nt, поскольку точка C расположена дальше от точки линии /, определяется, что точка C расположена за линией / (горизонтальная проекция этой точки линии / Помечено крестиком).
Сравнивая местоположение точки D с положением линии / точки в той же плоскости профиля, что и точка D (проекция этой точки отмечена крестиком), точка D находится ближе к точке / точке проекции линии Он помечен крестиком, что вы можете легко определить, является ли он низким или низким. , как показано в §5, вы можете легко определить, что точка M находится на линии p, а точка N находится вне линии p (рис. 40, а) , Фактически, проекции A4 и Mg точки M находятся на одном пересечении пунктирной линии, а их вершины находятся на линии преломления.
, как показано в §5, вы можете легко определить, что точка M находится на линии p, а точка N находится вне линии p (рис. 40, а) , Фактически, проекции A4 и Mg точки M находятся на одном пересечении пунктирной линии, а их вершины находятся на линии преломления.
Таким образом, сегменты AiBi и A2B2 разделяются в точках M и M2 в одной и той же точке, доказывая, что точка M принадлежит линии p. Для точки N — пунктирная линия связи, которая проходит через проекцию SU. Точка N находится вне линии p, потому что она не проходит через проекцию NZt. Если точка N находится на прямой линии p, для использования точки N в горизонтальной проекции требуется точка с крестиком в передней проекции.
Однако, поскольку его фронтальная проекция N2 выше, точка N находится выше линии p. Если через проекцию проведена прерывистая линия связи, можно определить положение точки N относительно линии глубины p. Более легко Непосредственно на основе пространственного представления.
Прямой р Нисходящая линия (ее проекция A (BX и A2Br имеют разные ориентации) и точка N находятся выше линии p, поэтому они также располагаются за линией p. На фиг.40b показано определение относительного положения точки M n N относительно прямой p путем построения профильной проекции.
На фиг.40b показано определение относительного положения точки M n N относительно прямой p путем построения профильной проекции.
Рассматривая поле P3, мы можем легко определить, что точка M находится на прямой p, а точка N находится на линии p и позади нее. Рисунок 41 Рисунок 43 Рисунок 42 Вот так Определение относительного положения точки и линии приводит к определению относительного положения двух точек. 4. Относительное положение двух линий.
Две линии в пространстве могут пересекаться, быть параллельными или пересекаться. Если линия / и m встречаются в точке / (, проекции Ki и / (K двух точек должны принадлежать одной и той же проекции линии / и m на основе свойства принадлежности (§3) (рисунок 41). Другими словами, пересечение одинаковых проекций двух пересекающихся линий находится на одной линии связи.
Если линии f и m параллельны, основываясь на параллельном свойстве (§3), одноименные проекции с тем же именем также параллельны, т. Е. L \ IIU и / 2IIг (рис. 42). Если линии f и m пересекаются и одни и те же именованные проекции пересекаются в точках At и B2, соответственно, эти точки не должны находиться на одной линии связи (рисунок 43). В противном случае линии I и m пересекаются.
42). Если линии f и m пересекаются и одни и те же именованные проекции пересекаются в точках At и B2, соответственно, эти точки не должны находиться на одной линии связи (рисунок 43). В противном случае линии I и m пересекаются.
Обратите внимание, что точка Ax является горизонтальной проекцией горизонтально конкурирующих точек A1 и Am, принадлежащих линии / и m. Поскольку точка A1 находится выше точки At, линия 1 видима, а линия mj не видна в горизонтальной проекции точки At (отмечена разрывом линии m вблизи точки Aj на рисунке 43).
Точно так же точка B2 является прямой проекцией двух фронтальных точек соревнования B1 и W, принадлежащих прямой линии / и t. В прямой проекции точки B2 отображается прямая линия m2t и прямая линия /? Точка W не видна, потому что она ближе, чем точка B1. Обратное верно, даже если линия, определенная в системе проекционных плоскостей Pn, P2, не является профилем. час / стр Вот так Взаимное положение двух непрофильных линий определяется следующим образом:
Линия параллельна, если проекции с одинаковым именем на две непрофильные линии параллельны. Если пересечение двух неосновных линейных проекций с одинаковыми именами находится на одной линии связи, линии пересекаются, но если эти точки не находятся на одной линии связи, линии пересекаются. В некоторых случаях, если две непрофильные линии находятся в конфликте и находятся в одной плоскости проекции, они не могут пересекаться.
Если пересечение двух неосновных линейных проекций с одинаковыми именами находится на одной линии связи, линии пересекаются, но если эти точки не находятся на одной линии связи, линии пересекаются. В некоторых случаях, если две непрофильные линии находятся в конфликте и находятся в одной плоскости проекции, они не могут пересекаться.
Такое выравнивание линий легко определяется на полях, где проекции не объединены. Поэтому из поля P2 мы определяем, что горизонтально конкурирующие прямые I и m пересекаются в точке K (рисунок 44). В поле nt передние конкурентные линии f и m оцениваются как параллельные (рис. 45).
Чтобы определить взаимное положение линий профиля, необходимо использовать прямое преломление или создать профильные проекции этих линий. Укажите две линии профиля p1 и p2. Первая — это точка А, вторая — это точки С и D, обе линии Р «а. 44 Рисунок 45 Одна профильная плоскость (рисунок 46). Путем построения прямой линии преломления для каждой из этих линий (§ 5) можно легко определить взаимное положение линий p1 и p2 (рис. 46а).
46а).
Рисунок 46 Когда прямое преломление A0B0 и CoD0 пересекается в точке K0, эти линии p1 и p2 пересекаются в точке K (Ki Km). AHKH _ L0 / (0 _ l2K2 _ _ CjKj KtBt ~~ K08: -KgV9 / C | £), -KoD0 «KtD7 То есть точка K (/ Ci, K2) принадлежит обеим данным линиям. Другими словами, это их пересечение. Когда прямые рефракции A0B0 и CoD0 совпадают или параллельны, эти линии p1 и p2 совпадают или параллельны соответственно.
На фиг.46b показано определение относительных положений линий профиля p1 и p2 путем построения проекции профиля. Поскольку проекции pz1 и p32 пересекаются в точке K3, эти линии p1 и p2 также пересекаются в точке K (Ki, Kr * Kz) — Очевидно, что если линии профиля p1 и p * находятся в разных плоскостях профиля (рис. 47), параллельной линии преломления A0B01 | CqDq, они также параллельны, а в случае прямого параллельного преломления линии профиля p1 и p2 пересекаются вы. 5.
Относительное положение точки и плоскости. Если точка находится на плоскости проекции, соответствующая проекция должна быть на прямой линии. Это плоская проекция (§ 8). Рисунок 47 Рисунок 48 Если точка находится на общей плоскости местоположения, проекция должна быть на одноименной проекции прямой линии, принадлежащей этой плоскости (§6).
Это плоская проекция (§ 8). Рисунок 47 Рисунок 48 Если точка находится на общей плоскости местоположения, проекция должна быть на одноименной проекции прямой линии, принадлежащей этой плоскости (§6).
Обратное верно даже в том случае, если выносная линия не является профилем, только если проблема решена в плоскости P1, P2 системы. Определения Чтобы установить относительную позицию точки и плоскости в общем месте, вы должны нарисовать линию расширения, которая конфликтует с этой плоскостью и этой точкой, и определить относительную позицию этой точки и линии расширения.
Если точка принадлежит выносной линии, она находится на указанной плоскости, а если точка находится за пределами линии, она также находится за пределами указанной плоскости. Кроме того, если точка находится выше (ниже) или перед (за) линией, она находится в том же положении относительно плоскости. На рисунке 48 показана плоскость ©, определяемая треугольником ABC и двумя точками M и N.
Определите положение этих точек относительно плоскости 0. Сначала определим положение точки М. Нарисуйте линию на плоскости, которая горизонтально конкурирует с точкой М. Чтобы линия M горизонтально конкурировала с точкой M, ее проекция / должна проходить через Mit, а линия / должна принадлежать плоскости, двум точкам (на рисунке 48 эти точки являются точками A и / ) Должен принадлежать самолету.
Сначала определим положение точки М. Нарисуйте линию на плоскости, которая горизонтально конкурирует с точкой М. Чтобы линия M горизонтально конкурировала с точкой M, ее проекция / должна проходить через Mit, а линия / должна принадлежать плоскости, двум точкам (на рисунке 48 эти точки являются точками A и / ) Должен принадлежать самолету.
Поскольку вторая проекция / 2 линии I проходит через проекцию M2 точки / AND, точка M принадлежит линии / и, следовательно, принадлежит плоскости b. Далее определим положение точки N относительно плоскости ©. Для этого нарисуйте линию, конкурирующую с точкой N перед линией m на плоскости. Точки поверхности, которые определяют линию m, являются точками C и 2.
Затем из поля П определите, что точка N находится вне линии m и, следовательно, вне поверхности c. Фактически, если точка N находится на прямой линии m, вам необходимо поставить крестик на точке горизонтальной проекции, используя ее точку передней проекции N2.
Однако, поскольку его горизонтальная проекция находится на сложной картине ниже, точка N находится перед конкурирующей точкой перед плоскостью 0 и, следовательно, также перед самой шестой плоскостью. Определить положение точки высоты N относительно плоскости 6.
Определить положение точки высоты N относительно плоскости 6.
Однако это проще сделать напрямую на основе пространственного представления. Плоскость является восходящей плоскостью (ее проекции A {BXC \ и A2B2C2 указывают в одном и том же направлении), а точка N находится перед плоскостью, поэтому она также находится в плоскости 0 одновременно. 6. Относительное положение линии и плоскости.
Прямая линия принадлежит плоскости, пересекает плоскость или параллельна плоскости. Если прямая / принадлежит плоскости и пересекается или параллельна, она совпадает с линией a (рис. 49, а) или пересекается (рис. 49, б) и параллельна этой плоскости (рис. 49, б) 49, в). Обратное также верно.
- Поэтому в общем случае определение взаимного расположения линий и плоскостей сводится. Определяет взаимное расположение двух линий, заданной линии и вспомогательной линии, принадлежащей данной плоскости. Обычно в качестве вспомогательной линии выбирается строка, которая конфликтует с конкретной строкой.
Вот так Чтобы определить относительную позицию линии / и плоскости B, вам нужно нарисовать линию расширения a на этой плоскости, составить конкуренцию линии / и определить относительную позицию конфликта. Прямо / а. Если эти линии пересекаются в точке / C, линия пересекает плоскость в той же точке.
Если конфликтующие линии совпадают или параллельны, указанная линия принадлежит или параллельна этой плоскости. Людмила Фирмаль
На рисунке 50 показана прямая линия / и плоскость 0 (LAN) в типичном положении. Определите положение друг друга. Создает вспомогательную линию в плоскости 9, которая конфликтует с указанной линией /. Создана линия a, которая конфликтует с горизонтальной линией. По этой причине он выделен на линиях AC и BC в плоскости точек / и 2 и конкурирует горизонтально с линией /.
Точки / и 2 определяют линию a, которая принадлежит плоскости 0 и конкурирует горизонтально с линией /. Далее определите относительное положение линии / и а. В поле A2 вы заметите эту линию / и пересечение. В этом случае сначала определяется передняя проекция K2 пересечения K, а затем определяется горизонтальная проекция K1. Точка K является пересечением этой линии / данной плоскости 0.
В поле A2 вы заметите эту линию / и пересечение. В этом случае сначала определяется передняя проекция K2 пересечения K, а затем определяется горизонтальная проекция K1. Точка K является пересечением этой линии / данной плоскости 0.
Определяет видимость линии / относительно плоскости 0. Судя по полю P2, левая линия / точки K находится ниже линии a и, следовательно, ниже плоскости ©, поэтому она находится на поле, и левая линия / точки K не видна справа от точки Конечно, K Direct будет отображаться. Видимость линии / поля P2 легче всего определить на основании того факта, что плоскость 0 в этом случае обращена вниз.
Поэтому, если вы уже определили, что линия находится ниже плоскости слева от точки K, она также находится перед плоскостью. Это означает, что прямая / яркая линия находится в поле P2, и ее точка K видна, поэтому она невидима с правой стороны точки K. 50, чтобы увеличить видимость с фигуры, плоскость 0 окружена треугольником локальной сети, а затем снаружи Отображает проекцию прямой / треугольной проекции.
Рисунок 50 Если, При построении вспомогательной линии a, если она конкурирует горизонтально с заданной линией / (рис. 51), если оказывается, что / 2II a2, это условие соответствует условию a и / или a, поэтому Линия / означает параллель плоскости c. Судя по полю A2, линия / находится на линии a и, следовательно, на плоскости 0, поэтому линия / полностью видна в поле Пt.
Так как плоскость 0 нисходящая, прямая линия / находится на плоскости Кость 0 находится за плоскостью © одновременно. Это означает, что он прямой / невидимый в поле P2. Если при создании выносной линии a оказывается, что I = a (/, = a и / 2 = a2) (рис. 52), линия принадлежит плоскости 0. Рассмотрим случай, когда определяется относительное положение линии профиля и плоскости.
Дано: линия профиля p, обозначенная двумя точками M и N, и плоскость общего положения 0 (A, B, C) (рис. 53). Как и в общем случае, создайте вспомогательную линию a на плоскости 0 и соревнуйтесь с этой линией 1 p. Для этого выберите точки / и 2 на линиях AC и AB на плоскости 0. Это определяет линию а. Легко видеть, что линия a такая же, как линия профиля p.
Это определяет линию а. Легко видеть, что линия a такая же, как линия профиля p.
Затем определите относительное положение двух линий профиля. Указанная линия p и вспомогательная линия a. Для этого постройте их прямо Рисунок 51 Ри <_. 52 1 В этом случае линия a одновременно горизонтальна и конкурирует с линией p впереди. Отражающие M0No и A / O20 или их профильные проекции p3 и a3. Поскольку прямые преломления или профильные проекции пересекаются, линии p и a также пересекаются, а их пересечение K является пересечением линии p и плоскости b.
Видимость прямой р относительно плоскости можно определить с помощью прямого преломления, но в этом случае это не сложно сделать. Рисунок 53 Прямо из пространственного представления. Прямая линия p восходящая (проекции MXNX и M2NZ обращены в одном направлении), плоскость 6 нисходящая (проекции AXBXCX и ArBrCr направлены в разные стороны), поэтому из точки K в сторону точки M Прямая р находится выше и ниже плоскости b.
Таким образом, в поле IIi прямая p из точки K видна в направлении точки M, а не в точке N .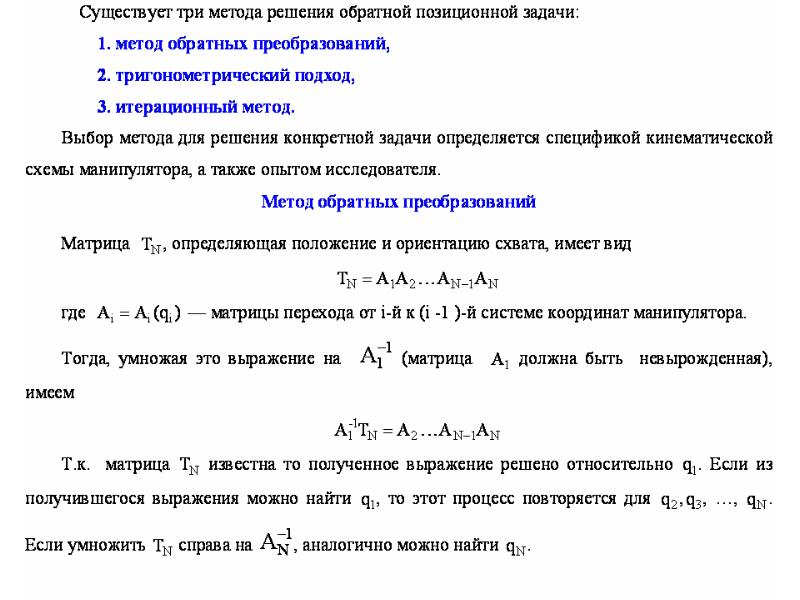 В поле П2 вы можете видеть прямую линию, фактически к точке N, а не к точке M. Линии p и a соответствуют, если прямое преломление M0N0 и / A или профильные проекции p3 и a3 оказываются параллельными или совпадают. По существу параллельны или совпадают. То есть каждая линия профиля p параллельна плоскости 6 или принадлежит ей.
В поле П2 вы можете видеть прямую линию, фактически к точке N, а не к точке M. Линии p и a соответствуют, если прямое преломление M0N0 и / A или профильные проекции p3 и a3 оказываются параллельными или совпадают. По существу параллельны или совпадают. То есть каждая линия профиля p параллельна плоскости 6 или принадлежит ей.
При определении относительного положения линии или плоскости, когда линия или плоскость проецируются, вы должны воспользоваться преимуществом соответствующего уменьшения проекции на точку или линию. В этом случае решение значительно упрощается. Поэтому, если линия проекции пересекается с какой-либо плоскостью, соответствующая Рисунок 54 Рис. 55 Точка пересечения совпадает с точкой, где проецируется сама линия.
Если плоскость проекции пересекает любую прямую линию, на каждом пересечении проекций определяется одна из проекций пересечения. На фиг.54 показана конфигурация точки пересечения K между горизонтальной проекционной линией i и плоскостью общего положения 0 (LAN).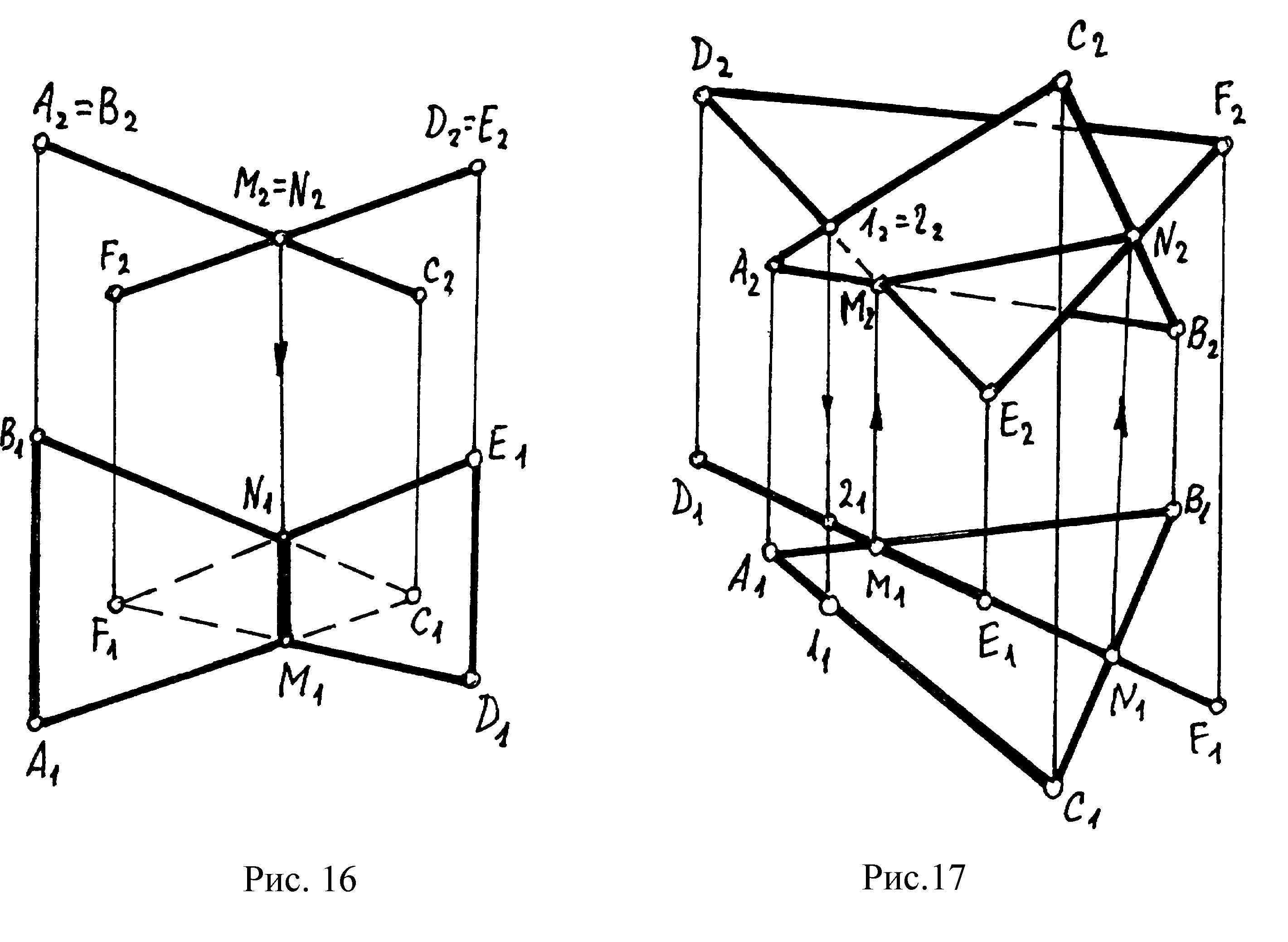 Горизонтальная проекция Kt точки K совпадает с проекцией iu, и фронтальная проекция Kr легко определяется из условия, что точка K принадлежит плоскости 0.
Горизонтальная проекция Kt точки K совпадает с проекцией iu, и фронтальная проекция Kr легко определяется из условия, что точка K принадлежит плоскости 0.
По этой причине используется вспомогательная линия A- /, принадлежащая плоскости 0. На фиг.55 показана конфигурация точки K на пересечении прямой в общем положении I и плоскости 2 передней проекции. Передняя проекция Kr точки K определяется пересечением передней проекции прямых и плоскостей / 2 и 22. Горизонтальная проекция Ki находится на пересечении линии связи и горизонтальной проекции / 4 прямые линии /.
Определение выравнивания между линиями и плоскостями является одной из наиболее важных задач курса. Эта задача включена в качестве помощи в решении более сложных задач с многогранными поверхностями и прямыми линиями, плоскостями и пересечениями друг с другом. Способ решения этой проблемы состоит в том, чтобы нарисовать вспомогательную линию в этой плоскости, которая конфликтует с этой линией, и)
Упрощенная интерпретация так называемого метода посредничества в конкретном случае использования конкурирующих линейных и вспомогательных проекционных плоскостей. Сначала через эту линию рисуется проекционная плоскость (медиатор), определяется линия пересечения между данной плоскостью и проецируемой, а затем проецируется с данной линией и данной плоскостью. Относительное положение прямого пересечения вещей определяется.
Легко видеть, что прямая линия на пересечении этих плоскостей является прямой линией в данной плоскости, которая конкурирует с этой линией, что указывает на эквивалентность обеих интерпретаций. 7. Относительное положение двух плоскостей. Две плоскости © и Л могут быть совпадающими, параллельными или пересекающимися.
Если плоскости © и A совпадают или параллельны, то в соответствии с этими случаями такая плоскость всегда существует в плоскости A для любой линии I в плоскости ©. Рисунок 56 Май м. Это будет совпадать с или параллельно линии / (рис. 56, а). Если плоскости 0 и A пересекаются, любая линия I в плоскости 0 пересекает линию m в плоскости A в точке K, принадлежащей линии, принадлежащей пересечению плоскости (рисунок 56c, линия m1), или линию /
Это некоторые линии m, и в этом случае линии / и m должны быть параллельны линии k (рис. 56, c, линии / 2, / 2). В частности, строки / и m совпадают, а затем линия k. Поскольку плоскость определяется двумя прямыми линиями (пересекающимися или параллельными), чтобы установить взаимное расположение двух плоскостей 0 и Λ, взаимное расположение не менее двух наборов линий f \ m1 и Z2, m2 этих плоскостей Должен быть установлен.
56, c, линии / 2, / 2). В частности, строки / и m совпадают, а затем линия k. Поскольку плоскость определяется двумя прямыми линиями (пересекающимися или параллельными), чтобы установить взаимное расположение двух плоскостей 0 и Λ, взаимное расположение не менее двух наборов линий f \ m1 и Z2, m2 этих плоскостей Должен быть установлен.
Легко видеть, что линии каждой пары не должны пересекаться. Обычно в качестве таких линий выбираются конфликтующие строки. В общем случае противоположное соглашение действует только при определении относительного положения двух плоскостей вдоль двух пересекающихся прямых линий в каждой плоскости. Не всегда возможно прояснить проблему при определении относительного положения плоскости вдоль двух параллельных линий в каждой плоскости.
Фактически, если две параллельные линии в одной плоскости параллельны двум параллельным линиям в другой плоскости, плоскости пересекаются или становятся параллельными. Таким образом, при определении взаимного расположения двух плоскостей, если линии первой пары конкурирующих линий параллельны, вторая пара конкурирующих линий параллельна соответствующей линии первой пары.
Не рисуй, чтобы быть. так Определение взаимного положения двух плоскостей сводится к определению взаимного положения двух конкурирующих линий, проведенных на этих плоскостях. Рассмотрим пример определения взаимного расположения двух плоскостей 0 (a X b) и A (c [| d) (рис. 57). Создайте пару конкурирующих линий так, чтобы первая линия принадлежала плоскости 0, а вторая линия принадлежала плоскости L.
В большинстве случаев используются линии конфликта уровня. В этом примере два горизонта h2 и нет конкурирующих впереди. Горизонтальная куль1 рисуется на плоскости 0, точки / и 2 выделяются линиями a и b, а горизонтальная h3 выделяется на плоскости A линиями c и d с использованием точек 3 и 4. Определите относительное положение горизонтальных линий hl и / i2. По полю?
Убедитесь, что горизонтальные линии A1 и L2 пересекаются, сначала определите горизонтальную проекцию K \ 1 пересечения US1, затем принадлежите передней проекции Kr1-точка K1 Обе плоскости A и A принадлежат прямому пересечению. Нарисуйте вторую пару конкурирующих горизонтальных линий L3 и I *, чтобы определить вторую точку на прямом пересечении плоскостей.
Нарисуйте горизонтальный номер плоскости c, используя точки 5 и b, и нарисуйте горизонтальный r4 плоскости A, используя точки 7 и 8. Пересечение этих горизонтальных линий определяет вторую точку K2 прямого пересечения плоскости. Прямая k, проходящая через точки K} и K2, является прямым пересечением плоскостей 0 и L. Вы можете видеть, что при построении второй пары contour / i3 и No каждая может быть определена с использованием только одной точки.
Рисунок 57 Фактически, горизонтальная L3 должна быть параллельна ранее нарисованной горизонтальной L1, а горизонтальная / r4 должна быть параллельной горизонтальной №. Следовательно, горизонтальная L3 определяется одной точкой 5, а горизонтальная h5 определяется точкой 7. Таким образом, плоскости B и A, определенные на фиг.2, пересекаются 57, а линия k является линией пересечения.
При определении взаимного расположения двух плоскостей, если оказывается, что линии обеих пар конкурирующих линий совпадают, то есть Z1-m1 и / 2 = m2 (см. Рис. 56, а), Эти самолеты совпадают. Если одна линия из пары конкурирующих линий параллельна, то есть / 21 | t2 (см. Рис. 56.6 и c), эта пара линий является соответствующей линией первой пары для уточнения взаимной позиции.
Вы должны нарисовать еще одну пару линий конфликта, чтобы они не были параллельны Далее, если прямые этой пары параллельны, то есть / H | m1, плоскости 6 и A параллельны (см. Рисунки 56 и 6). Если прямые Ix и m1 пересекаются в точке K, эти пересекающиеся плоскости Плоскость k проходит через точку K, параллельную прямой / 2 и τ2 (см. Рис. 56, в).
При определении взаимного расположения двух плоскостей при проецировании одной или обеих плоскостей необходимо использовать тот факт, что каждая проекция сводится к прямой линии. На рисунке 58 показано расположение линий до пересечений плоскости B (ABC) и горизонтальной плоскости проекции 2 в типичных положениях.
Горизонтальная проекция Ki% линии k совпадает с проекцией 2 поверхности 2. Я принадлежу к плоскости. Метод конкурирующих линий, в котором определяются относительные положения двух плоскостей, является упрощенной интерпретацией метода посредничества, как и при определении относительных положений линий и плоскостей.
Сначала нарисуйте две вспомогательные плоскости проекции, затем найдите прямое пересечение этих плоскостей и этих плоскостей, а затем определите относительное положение этих плоскостей и прямое пересечение каждой проекции. 0 Рис. 58
Смотрите также:
Предмет начертательная геометрия
ВТОРАЯ ГЛАВНАЯ ПОЗИЦИОННАЯ ЗАДАЧА (2ГПЗ) — КиберПедия
Целью решения 2ГПЗ является построение линии пересечения поверхности другим геометрическим телом. От вида и формы поверхности и этого тела зависит и форма получаемой линии пересечения. Многообразие разновидностей 2ГПЗ поясняется нижеприведенной классификацией, см. рисунок 14.
При построении линии пересечения возможны различные пути решения задачи. Если один из образов занимает проецирующее положение, то одна проекция требуемой линии уже имеется, и работа сводится лишь к нахождению ее второй проекции. Если же пересекающиеся образы занимают общее положение, то для построения могут быть применены либо метод вспомогательных секущих плоскостей, либо вспомогательных секущих сфер.
Рисунок 14 – Классификация вторых главных позиционных задач
Наиболее универсальным для нахождения точек линии пересечения поверхностей (криволинейных, многогранных и их комбинаций) является метод секущих плоскостей. Его суть и порядок проводимых действий поясняются моделью и алгоритмом, см. рисунок 15.
| Алгоритм 1.Выбирается вспомогательная плоскость и ею пересекаются обе исходные поверхности. 2.Строится линия пересечения этой плоскости с каждой из исходных поверхностей. 3. Отмечаются точки взаимного пересечения построенных линий. 4. Проводится ряд вспомогательных плоскостей и строится множество точек пересечения таких дополнительных линий. 5. Полученные точки объединяются огибающей линией, которая и является искомой. 6. Устанавливается видимость участков построенной линии. |
Рисунок 15 – Модель и алгоритм метода секущих плоскостей
Задача 5: Построить линию пересечения поверхности прямого кругового конуса со сферой. Определить видимость линии.
Решение задачи, см. рисунок 16.
Верхнюю и нижнюю точки искомой линии можно найти с помощью горизонтально-проецирующей плоскости α, проходящей через оси вращения сферы и конуса. Она пересечет заданные поверхности по окружности и треугольнику, которые являются фронтальными очерками конуса и сферы. В пересечении этих очерков находятся точки А» и В». С помощью линий связи определяются их горизонтальные проекции А’ и В’.
Из анализа проекций видно, что А’ является видимой, а В’ невидимой. Значит, где-то линия пересечения меняет свою видимость. Точки-границы видимости находятся на экваторе сферы. Поэтому для их нахождения используется вспомогательная плоскость β, проходящая через него. Эта плоскость пересекает конус по окружности, с крайней левой точкой 1, а сферу по экватору. Построив по проекции 1″ горизонтальную проекцию окружности на конусе, легко видеть двойные точки С’, в которых она пересекается с экватором сферы.
Для уточнения формы искомой линии следует взять промежуточную плоскость γ. Она пересекает конус по окружности с крайней левой точкой 2″, а сферу по окружности с крайней правой точкой 3″. По их фронтальным проекциям с помощью линий проекционной связи строятся горизонтальные проекции этих окружностей, которые пересекаются в двойных точках D’.
Перенеся полученные точки С и D на следы плоскостей β и γ, определяется набор точек, через которые проходит фронтальная проекция искомой линии пересечения. Видно, что она является кривой. Обвод проекций точек А’-С’-D’-В’-D’-С’-А’, формирует ее горизонтальную проекцию. Следует учесть, что участок С’-D’-В’-D’-С’ будет невидимым, т.к. находится на нижней части сферы.
Рисунок 16 – Построение линии пересечения поверхностей методом секущих плоскостей
Для закрепления материала по методу секущих плоскостей, рекомендуется решить задачи Приложения Б. Их графические условия для более наглядной работы целесообразно увеличить в два раза.
Условиями метода секущих сфер являются следующие – пересекаются между собой поверхности вращения; их оси образуют плоскость, параллельную какой-либо плоскости проекций; эти оси пресекаются в пределах чертежа.
Его суть и порядок проводимых действий поясняются моделью и алгоритмом, см. рисунок 17. Рядом приведено решение задачи по алгоритму с условием, соответствующим модели.
| Алгоритм 1.Находится центр О вписываемых секущих сфер, как точка пересечения осей вращения исходных поверхностей. 2. Определяется радиус Rmax максимальной сферы. Он равен расстоянию от центра до наиболее уделенной точки пересечения очерков поверхностей. 3.Определяется радиус Rmin минимальной сферы. Она должна одной поверхности касаться, а другую пересекать. 4. Задается минимальная сфера и строятся окружности b и a, по которым она пересекает тор и касается конуса. 5. Находятся точки А и В, где построенные линии пересеклись. 6. Проводится ряд сфер промежуточных радиусов и для них строятся аналогичные пункту 4 окружности, которые пересекаются в точках. 7. Добавляются к найденному набору верхняя С и нижняя D точки. 8. Полученные точки обводятся плавной огибающей кривой, которая и будет искомой. 9. В случае построения двух проекций поверхностей, известными способами строится горизонтальная проекция линии пересечения и определяется ее видимость. |
Рисунок 17 – Модель, алгоритм метода секущих сфер и решение задачи по методу
Задачи, рекомендованные для самостоятельного решения с использованием метода секущих сфер, приведены в Приложении В. Для работы следует скопировать графическое условие задач в масштабе 1:1.
СПИСОК ЛИТЕРАТУРЫ
1. Виноградов В.Н. Начертательная геометрия : Учебник/В.Н.Виноградов. 3-е изд., перераб. И доп.- Мн.: Амалфея, 2001.-368 с.
2. Начертательная геометрия: Учеб. Для вузов/ Н.Н. Крылов,Г.С.Иконникова, В.Л.Николаев, В.Е.Васильев; Под ред. Н.Н.Крылова. – 7-е изд., перераб. И доп. – М.: Высш.шк., 2001. – 224 с.: ил.
3. Локтев О.В. Задачник по начертательной геометрии: Учеб. пос. для втузов /О.В.Локтев, П.А.Числов. — %-е изд. Стер. – М.: Высш.шк., 2004. – с.: ил.
Приложение А (рекомендуемое)
Найти точки пересечения заданных прямых линий с поверхностями. Определить видимость линии.
Приложение А (продолжение)
Приложение Б (рекомендуемое)
Методом секущих плоскостей построить линию пересечения заданных поверхностей. Определить видимость всех линий чертежа.
Приложение В (рекомендуемое)
Начертательная геометрия | Контрольные работы | Методические указания
1. Рекомендации по выполнению контрольной работы
Контрольная работа состоит из четырех заданий по основным темам курса «Начертательная геометрия»: позиционные и метрические задачи; многогранники; методы преобразования чертежа; взаимное пересечение поверхностей.
Каждое задание выполняется на ватмане формата А3 (420х297). По согласованию с преподавателем, работа может быть выполнена на компьютере, с использованием CAD-программы.
На чертеже должна быть выполнена рамка и основная надпись в соответствии с требованиями ГОСТ 2.104-68. Таблица с данными (координаты точек по варианту) должна быть размещена в верхнем правом углу чертежа, а текст задач – в верхнем левом углу. Чертеж рекомендуется выполнять в масштабе 1:1, при необходимости масштаб может быть изменен. Все надписи на чертеже должны быть выполнены в соответствии с ГОСТ 2.304-81. Толщина линий выбирается в соответствии с ГОСТ 2.303-68. При выполнении задания рекомендуется: условие задачи выполнять черным цветом, решение – синим или зеленым, результат построения – красным.
Перед выполнением задания по варианту, предложенному преподавателем, студент обязан ознакомиться с теоретическим материалом, необходимым для решения данной задачи, по лекциям или литературе, рекомендуемой рабочей программой по дисциплине. После чего внимательно разобраться с примером решения подобной задачи в данных методических указаниях. Сначала выполнить задачу на черновике, а затем оформить ее на ватмане.
2. Краткие теоретические сведения
Позиционными задачами называются задачи на построение элементов общих для взаимодействующих объектов и задачи на взаимное положение геометрических объектов. Первая группа задач включает задачи на принадлежность и задачи на пересечение. Ко второй группе задач относятся задачи на параллельность геометрических объектов.
Задачи на перпендикулярность объектов относят к метрическим задачам.
Метрические задачи это задачи на определение линейных или угловых размеров геометрических объектов, а также расстояний и углов между ними. Главным вопросом метрических задач является вопрос о построении перпендикуляра к прямой или плоскости.
Классификация позиционных задач относящихся к элементарным геометрическим объектам (точка, прямая, плоскость), представлена на Рисунке 2.1.
Рисунок 2.1 — Классификация позиционных задач
Задания № 1 и № 2 представляют задачи на принадлежность и пересечение, поскольку в них требуется построить из точки А перпендикуляр к плоскости, заданной треугольником BCD, и определить его длину.
python — метод принимает 1 позиционный аргумент, но дано 2
Я выполняю задачу с сельдереем, для которой нужны два аргумента, например:
@ task_bp.route ('/ analysis / ', methods = ['GET', 'POST'])
def save_user_with_analysis (user_id):
post_data = request.get_json ()
response_object = {
'статус': 'сбой',
'message': 'Пользователь не существует'
}
spotify_token = ''
если post_data:
spotify_token = post_data.получить ('spotify_token')
пытаться:
user = User.query.filter_by (id = user_id) .first ()
если не пользователь:
вернуть jsonify (response_object), 404
еще:
# передать 2 аргумента, идентификатор и токен
task = save_user_tracks_with_analysis.apply_async (args = [user_id, spotify_token], kwargs = {})
response_object = {
'статус': 'успех',
'message': 'Фоновая задача для сохранения пользовательского анализа в базе данных инициализирована.',
'данные': {
'task_id': задача.я бы,
}
}
вернуть jsonify (объект_ответа), 202
except (exc.IntegrityError, ValueError):
db.session.rollback ()
вернуть jsonify (response_object), 404
и:
@ celery.task (queue = 'analysis', default_retry_delay = 30, max_retries = 3, soft_time_limit = 1000)
def save_user_tracks_with_analysis (user_id, spotify_token):
track_and_features = sp_utilities.query_tracks (spotify_token)
пытаться:
в то время как True:
result = Upload_Track_With_Audio_Analysis (набор данных = следующий (track_and_features),
user_id = user_id)
кроме StopIteration:
проходить
наконец-то:
дель track_and_features
return {'Status': 'Треки загружены с анализом!'}
, но я получаю эту ошибку:
TypeError: save_user_tracks_with_analysis () принимает 1 позиционный аргумент, но дано 2
Полная трассировка:
[2019-10-23 00: 38: 58,444: INFO / MainProcess] Полученная задача: проект.api.routes.background.save_user_tracks_with_analysis [d0db40ee-a1bb-4dbb-b066-7db9b5f5900d]
[2019-10-23 00: 38: 58,450: DEBUG / MainProcess] TaskPool: применить (args :( 'project.api.routes.background.save_user_tracks_with_analysis', 'd0db40-ee-a1bb66-a1bb 7db9b5f5900d ', {' lang ':' py ',' task ':' brandio.api.routes.background.save_user_tracks_with_analysis ',' id ':' d0db40ee-a1bb-4dbb-b066-7db9b5f5900d ',' shadow ': None 'eta': Нет, 'expires': Нет, 'group': Нет, 'retries': 0, 'timelimit': [Нет, 1000], 'root_id': 'd0db40ee-a1bb-4dbb-b066-7db9b5f5900d', 'parent_id': нет, 'argsrepr': "['1', '']", 'kwargsrepr': '{}', 'origin': 'gen14 @ 9065a884289a', 'reply_to': '4ed9cf27-826d-3d3d -9282-83750953189b ',' correlation_id ':' d0db40ee-a1bb-4dbb-b066-7db9b5f5900d ',' delivery_info ': {' exchange ':' ',' routing_key ':' analysis ',' priority ': 0,' redelivered ': None}}, b' [["1", ""], {}, {"callbacks": null, "errbacks": null, "chain": null, "chord": null}] ',' application / json ',' utf-8 ') kwargs: {})
[2019-10-23 00: 38: 58,457: DEBUG / MainProcess] Задача принята: проект.api.routes.background.save_user_tracks_with_analysis [d0db40ee-a1bb-4dbb-b066-7db9b5f5900d] pid: 12
[2019-10-23 00: 38: 58,456: ERROR / ForkPoolWorker-3] Задача project.api.routes.background.save_user_tracks_with_analysis [d0db40ee-a1bb-4dbb-b066-7db9b5f5900d] возникла неожиданно: (TypeError_analcks) принимает_сохранение_трасса_ позиционный аргумент, но было дано 2 ',)
Отслеживание (последний вызов последний):
Файл "/usr/lib/python3.6/site-packages/celery/app/trace.py", строка 382, в trace_task
R = retval = удовольствие (* аргументы, ** kwargs)
Файл "/ usr / lib / python3.6 / site-packages / celery / app / trace.py ", строка 641, в __protected_call__
вернуть self.run (* args, ** kwargs)
TypeError: save_user_tracks_with_analysis () принимает 1 позиционный аргумент, но было дано 2
[2019-10-23 00: 40: 10,528: INFO / MainProcess] Полученная задача: project.api.routes.background.save_user_tracks_with_analysis [a049f85f-bb5a-4cf3-81f8-f334210cb7e4]
[2019-10-23 00: 40: 10,532: DEBUG / MainProcess] TaskPool: Apply (args :( 'project.api.routes.background.save_user_tracks_with_analysis ',' a049f85f-bb5a-4cf3-81f8-f334210cb7e4 ', {' lang ':' py ',' task ':' project.api.routes.background.save_user_tracks_with_analysis '-b493': -81f8-f334210cb7e4 ',' shadow ': Нет,' eta ': Нет,' expires ': Нет,' group ': Нет,' retries ': 0,' timelimit ': [None, 1000],' root_id ': 'a049f85f-bb5a-4cf3-81f8-f334210cb7e4', 'parent_id': Нет, 'argsrepr': "[ '1', 'BQCFoIPB1BS3_Fe4nrHuTJMJ2bDDqOJBlEMh3-TwzrAeLk8GN30O3DQm3hRW2DRFVbaDb-0msctmjN6phKAmad4F6hs9AilCyyO_Ky5JoT1cThsRNoL6GptRh2SPcYL29toTkUQitXcRSaDRQY0BsJB9haNtCRD-KNhNPQSC0dbCB6M-tWBd-4l9hl74tRR7csamu5qBol653QBfoNhcKzvJeSaewPMpyhMArvA_DW4Pcr8KLFsFmEV8jiDb2d0f']", 'kwargsrepr': «{ } ',' origin ':' gen14 @ 9065a884289a ',' reply_to ':' 4ed9cf27-826d-3d3d-9282-83750953189b ',' correlation_id ':' a049f85f-bb5a-4cf3-81f8-f334210cb7e4fo ':' Delivery_info ', 'exchange': '', 'routing_key': 'analysis', 'priority': 0, 'redelivered': None}}, b '[["1" ,... kwargs: {})
[2019-10-23 00: 40: 10,536: DEBUG / MainProcess] Задача принята: project.api.routes.background.save_user_tracks_with_analysis [a049f85f-bb5a-4cf3-81f8-f334210cb7e4] pid: 13
[2019-10-23 00: 40: 10,537: ERROR / ForkPoolWorker-4] Задача project.api.routes.background.save_user_tracks_with_analysis [a049f85f-bb5a-4cf3-81f8-f334210cb7e4] сгенерирована неожиданно: save_with_analysis позиционный аргумент, но было дано 2 ',)
Отслеживание (последний вызов последний):
Файл "/ usr / lib / python3.6 / site-packages / celery / app / trace.py ", строка 382, в trace_task
R = retval = удовольствие (* аргументы, ** kwargs)
Файл "/usr/lib/python3.6/site-packages/celery/app/trace.py", строка 641, в __protected_call__
вернуть self.run (* args, ** kwargs)
TypeError: save_user_tracks_with_analysis () принимает 1 позиционный аргумент, но было дано 2
[2019-10-23 01: 45: 54,209: INFO / MainProcess] Полученная задача: project.api.routes.background.save_user_tracks_with_analysis [7391e3c7-ddf9-4f76-a046-36506b3c8289]
[2019-10-23 01: 45: 54,212: DEBUG / MainProcess] TaskPool: Apply (args :( 'project.api.routes.background.save_user_tracks_with_analysis ',' 7391e3c7-ddf9-4f76-a046-36506b3c8289 ', {' lang ':' py ',' task ':' project.api.routes.background.save_user_tracks_ ',' '7391e3c7-ddf9-4f76-a046-36506b3c8289', 'shadow': Нет, 'eta': Нет, 'expires': Нет, 'group': Нет, 'retries': 0, 'timelimit': [Нет, 1000 ], 'root_id': '7391e3c7-ddf9-4f76-a046-36506b3c8289', 'parent_id': Нет, 'argsrepr': "( '1', 'BQABvl5STugFWzHizIipkw0B7-_g7MmP-lFAokVh5_XMJFHGl6XYNmEvi8AieQduMxpqHCujjkOJC4sypY4w-7_77NSsspXUpVn65bW77VeyihG5JLmJpIC86pqzzijZZTZfu-RTt1_yBCkK7UXsEb1K7biWcL8gpVsfZu1vAsFsI1V51IP3sxKoXf3ohPxTLddh2Wfi_npfOv1wkgaeLdbwxCaO2gEqowqRappzIiSNfXqCSAIdNNaGPROqpR5r')", «kwargsrepr ':' {} ',' origin ':' gen30 @ 9065a884289a ',' reply_to ':' 5b96d61f-e2f9-3237-a7a1-afab83d41e12 ',' correlation_id ':' 7391e3c7-ddf9-4f76-a046-36506b3c828 delivery_info ': {' exchange ':' ',' routing_key ':' analysis ',' priority ': 0,' redelivered ': нет}}, b' [["1" ,... kwargs: {})
[2019-10-23 01: 45: 54,214: DEBUG / MainProcess] Задача принята: project.api.routes.background.save_user_tracks_with_analysis [7391e3c7-ddf9-4f76-a046-36506b3c8289] pid: 12
[2019-10-23 01: 45: 54,225: ERROR / ForkPoolWorker-3] Задача project.api.routes.background.save_user_tracks_with_analysis [7391e3c7-ddf9-4f76-a046-36506b3c8289] неожиданно возникла: (TypeError_analcks) принимает_сохранение_сервера позиционный аргумент, но было дано 2 ',)
Отслеживание (последний вызов последний):
Файл "/ usr / lib / python3.6 / site-packages / celery / app / trace.py ", строка 382, в trace_task
R = retval = удовольствие (* аргументы, ** kwargs)
Файл "/usr/lib/python3.6/site-packages/celery/app/trace.py", строка 641, в __protected_call__
вернуть self.run (* args, ** kwargs)
TypeError: save_user_tracks_with_analysis () принимает 1 позиционный аргумент, но было дано 2
, насколько мне известно, apply_sync () требует, чтобы аргументы передавались как list .
что мне не хватает?
python — получение ошибки TypeError: create_task () принимает от 1 до 2 позиционных аргументов, но 3 были даны при создании облачных задач Google
из Google.облачный импорт tasks_v2
импортировать json
GCP_PROJECT = 'тест'
GCP_LOCATION = 'европа-запад6'
def enqueue_task (queue_name, payload, process_url):
client = tasks_v2.CloudTasksClient ()
parent = client.queue_path (GCP_PROJECT, GCP_LOCATION, queue_name)
task = {
'app_engine_http_request': {
'http_method': 'POST',
'relative_uri': process_url
}
}
если полезная нагрузка отсутствует:
вернуть ложь
payload = json.dumps (полезная нагрузка)
convert_payload = payload.encode ()
задача ['app_engine_http_request'] ['body'] = convert_payload
вернуть клиента.create_task (родитель, задача)
Я постоянно получаю следующую ошибку, когда пытаюсь создать задачу Google Cloud. Используемая среда выполнения Google App Engine — python38. Он работал нормально, но внезапно после развертывания с использованием gcp CLI теперь он не работает.
Traceback (последний звонок последний):
Файл "/layers/google.python.pip/pip/flask/app.py", строка 2447, в wsgi_app
response = self.full_dispatch_request ()
Файл "/layers/google.python.pip/pip/flask/app.py", строка 1952, в full_dispatch_request
rv = self.handle_user_exception (е)
Файл "/layers/google.python.pip/pip/flask/app.py", строка 1821, в handle_user_exception
ререйз (exc_type, exc_value, tb)
Файл "/layers/google.python.pip/pip/flask/_compat.py", строка 39, повторно поднимается
поднять стоимость
Файл "/layers/google.python.pip/pip/flask/app.py", строка 1950, в full_dispatch_request
rv = self.dispatch_request ()
Файл "/layers/google.python.pip/pip/flask/app.py", строка 1936, в dispatch_request
return self.view_functions [rule.endpoint] (** req.view_args)
Файл "/srv/main.py", строка 153, в sync_request
queue_response = queues.enqueue_task (
Файл "/srv/queues.py", строка 28, в enqueue_task
вернуть client.create_task (родитель, задача)
TypeError: create_task () принимает от 1 до 2 позиционных аргументов, но было дано 3
celery.app.task — документация Celery 5.0.5
"" "Реализация задачи: контекст запроса и базовый класс задачи." ""
import sys
из billiard.einfo импорт ExceptionInfo
из сериализации импорта комбу
из комбу.исключения import OperationalError
из kombu.utils.uuid import uuid
из сельдерея импорт current_app, группа, состояния
from celery._state import _task_stack
from celery.canvas import _chain, подпись
из импорта celery.exceptions (Игнорировать, Неправильно настроенный,
MaxRetriesExceededError, Reject, Retry)
из celery.local import class_property
from celery.result import EagerResult, denied_join_result
from celery.utils import abstract
из celery.utils.functional import mattrgetter, might_list
из сельдерея.utils.imports импорт экземпляра
from celery.utils.nodenames import gethostname
из celery.utils.serialization import raise_with_context
из .annotations импортировать resolve_all как resolve_all_annotations
из .registry import _unpickle_task_v2
из .utils import appstr
__all__ = ('Контекст', 'Задача')
#: извлекает атрибуты, связанные с публикацией сообщения из объекта.
extract_exec_options = mattrgetter (
'queue', 'routing_key', 'exchange', 'приоритет', 'истекает',
'сериализатор', 'режим_доставки', 'сжатие', 'предел_времени',
soft_time_limit, немедленный, обязательный, # imm + man устарел
)
# Мы здесь очень серьезно относимся к __repr__;)
R_BOUND_TASK = '<класс {0.__name__} из {app} {flags}> '
R_UNBOUND_TASK = '<несвязанный {0 .__ name __} {flags}>'
R_INSTANCE = '<@task: {0.name} из {app} {flags}>'
#: Здесь для обратной совместимости, поскольку задачи больше не используют настраиваемый мета-класс.
TaskType = тип
def _strflags (флаги, по умолчанию = ''):
если флаги:
return '({})'. format (',' .join (флаги))
вернуть по умолчанию
def _reprtask (задача, fmt = None, flags = None):
flags = list (flags), если flags не равен None else []
flags.append ('совместимый с v2') if task .__ v2_compat__ else Нет
если не fmt:
fmt = R_BOUND_TASK, если задача._app else R_UNBOUND_TASK
вернуть fmt.format (
задача, flags = _strflags (флаги),
app = appstr (task._app) if task._app else None,
)
[документы] Контекст класса:
"" "Переменные запроса задачи (Task.request)." ""
logfile = Нет
loglevel = Нет
hostname = None
id = Нет
args = Нет
kwargs = Нет
повторные попытки = 0
eta = Нет
expires = None
is_eager = Ложь
заголовки = Нет
delivery_info = Нет
reply_to = нет
root_id = Нет
parent_id = Нет
correlation_id = Нет
taskset = None # сопоставить псевдоним с группой
group = Нет
group_index = Нет
аккорд = Нет
цепь = Нет
utc = Нет
called_directly = Правда
callbacks = Нет
errbacks = Нет
timelimit = Нет
origin = None
_children = None # см. свойство
_protected = 0
def __init __ (self, * args, ** kwargs):
себя.обновление (* аргументы, ** kwargs)
def update (self, * args, ** kwargs):
вернуть self .__ dict __. update (* args, ** kwargs)
def clear (self):
вернуть self .__ dict __. clear ()
def get (self, key, default = None):
return getattr (self, key, default)
def __repr __ (сам):
return ''. format (vars (self))
def as_execution_options (сам):
limit_hard, limit_soft = self.timelimit или (Нет, Нет)
возвращаться {
'task_id': self.id,
'root_id': сам.root_id,
'parent_id': self.parent_id,
'group_id': self.group,
'group_index': self.group_index,
'аккорд': селф. аккорд,
'цепочка': self.chain,
'ссылка': self.callbacks,
'link_error': self.errbacks,
'expires': self.expires,
soft_time_limit: limit_soft,
'time_limit': limit_hard,
'заголовки': self.headers,
'retries': self.retries,
'reply_to': self.reply_to,
«происхождение»: я.источник,
}
@имущество
def children (self):
# дочерний элемент должен быть пустым списком для каждого потока
если self._children равно None:
self._children = []
вернуть self._children
[документы] @ abstract.CallableTask.register
класс Задача:
"" "Базовый класс задачи.
Примечание:
При вызове задачи применяют метод: meth: `run`. Этот метод должен
определяться всеми задачами (за исключением случаев, когда метод: meth: `__call__`
отменяется).
"" "
__trace__ = Нет
__v2_compat__ = False # установлено старой базой в сельдерее.task.base
MaxRetriesExceededError = MaxRetriesExceededError
OperationalError = OperationalError
#: Используемая стратегия выполнения или ее полное имя.
Стратегия = 'celery.worker.strategy: по умолчанию'
#: Используемый класс запроса или его полное имя.
Request = 'celery.worker.request: Request'
#: Экземпляр приложения, связанный с этим классом задачи.
_app = Нет
#: Название задачи.
name = None
#: Включить проверку аргументов.
#: Вы можете установить значение false, если не хотите, чтобы подпись была
#: проверяется при вызове задачи.#: По умолчанию: attr: `app.strict_typing <@ Celery.strict_typing>`.
typing = Нет
#: Максимальное количество попыток перед отказом. Если установлено: const: `None`,
#: он ** никогда ** не перестанет повторять попытки.
max_retries = 3
#: Время по умолчанию в секундах перед повторной попыткой задачи должно быть
№: выполнено. По умолчанию 3 минуты.
default_retry_delay = 3 * 60
#: Ограничение скорости для этого типа задачи. Примеры:: const: `None` (no rate
#: предел), `` 100 / с '' (сто задач в секунду), `` 100 / м '' (сто задач
#: минута), '100 / ч' (сто задач в час)
rate_limit = Нет
#: Если включено, воркер не будет сохранять состояние задачи и возвращать значения
#: для этой задачи.По умолчанию: setting: `task_ignore_result`
#: параметр.
ignore_result = Нет
#: Если включено, запрос будет отслеживать подзадачи, запущенные
#: эта задача, и эта информация будет отправлена с результатом
#: (`` result.children``).
trail = True
#: Если включено, воркер будет отправлять события мониторинга, связанные с
#: эта задача (но только если воркер настроен на отправку
#: события, связанные с задачей).
#: Обратите внимание, что это не влияет на случай сбоя задачи.
#: если задача не зарегистрирована (так как у нее не будет класса задачи
#: чтобы проверить этот флаг).send_events = Верно
#: При включении ошибки будут сохраняться, даже если задача в противном случае
#: настроен на игнорирование результатов.
store_errors_even_if_ignored = Нет
#: Имя сериализатора, зарегистрированного с
#:: mod: `kombu.serialization.registry`. По умолчанию - json.
сериализатор = Нет
#: Жесткое ограничение по времени.
#: По умолчанию: setting: `task_time_limit`.
time_limit = Нет
#: Мягкое ограничение по времени.
#: По умолчанию: настройка: `task_soft_time_limit`.soft_time_limit = Нет
#: Бэкэнд хранилища результатов, используемый для этой задачи.
backend = Нет
#: Если отключено, эта задача не будет регистрироваться автоматически.
autoregister = True
#: Если этот параметр включен, задача будет сообщать о своем статусе как «запущена», когда задача
#: выполняется работником. По умолчанию отключено как нормальное поведение
#: не сообщать о таком уровне детализации. Задачи либо ожидают выполнения, либо
#: завершено или ожидает повторной попытки.
#:
#: Статус "начат" может быть полезен, когда есть длинные
#: запущенные задачи и нужно сообщить, какая задача сейчас выполняется
#: Бег.#:
#: Значение по умолчанию для приложения можно изменить с помощью
#:: setting: настройка `task_track_started`.
track_started = Нет
#: При включении сообщения для этой задачи будут подтверждаться ** после **
#: задача была выполнена, а не * непосредственно перед * (
#: поведение по умолчанию).
#:
#: Обратите внимание, это означает, что задача может быть выполнена дважды, если
#: рабочий вылетает во время выполнения.
#:
#: Значение по умолчанию для приложения можно изменить с помощью
#:: setting: параметр `task_acks_late`.acks_late = Нет
#: При включении сообщения для этой задачи будут подтверждены, даже если
#: сбой или время ожидания.
#:
#: Настройка этого параметра применяется только к задачам, которые
#: подтверждено ** после ** их выполнения и только в том случае, если
#:: setting: `task_acks_late` включен.
#:
#: Значение по умолчанию для приложения можно изменить с помощью
#:: setting: параметр `task_acks_on_failure_or_timeout`.
acks_on_failure_or_timeout = Нет
#: Даже если: attr: `acks_late` включен, рабочий будет
#: подтверждать задачи, когда рабочий процесс их внезапно выполняет
#: выход или сигнализация (e.g.,: sig: `KILL` /: sig:` INT` и т. д.).
#:
#: Установка этого значения в true позволяет вместо этого повторно ставить сообщение в очередь,
#: чтобы задача снова выполнялась тем же воркером или другим
№: рабочий.
#:
#: Предупреждение: включение этого параметра может вызвать зацикливание сообщений; убедитесь, что вы знаете
#: что ты делаешь.
reject_on_worker_lost = Нет
#: Кортеж ожидаемых исключений.
#:
#: Это ошибки, которые ожидаются при нормальной работе
#: и это не должно расцениваться работником как настоящая ошибка.#: В настоящее время это означает, что состояние будет обновлено до ошибки
#: состояние, но рабочий не регистрирует событие как ошибку.
бросает = ()
#: Срок действия задачи по умолчанию.
expires = None
#: Приоритет задачи по умолчанию.
приоритет = Нет
#: Максимальная длина представления результатов, используемая в журналах и событиях.
resultrepr_maxsize = 1024
#: Стек запроса задачи, текущий запрос будет самым верхним.
request_stack = Нет
#: Некоторые могут ожидать, что запрос будет существовать, даже если задача не была
#: называется.Вероятно, это не рекомендуется.
_default_request = Нет
#: Устарел атрибут `` abstract '' здесь для совместимости.
abstract = True
_exec_options = Нет
__bound__ = Ложь
from_config = (
('сериализатор', 'task_serializer'),
('rate_limit', 'task_default_rate_limit'),
('приоритет', 'task_default_priority'),
('track_started', 'task_track_started'),
('acks_late', 'task_acks_late'),
('acks_on_failure_or_timeout', 'task_acks_on_failure_or_timeout'),
('reject_on_worker_lost', 'task_reject_on_worker_lost'),
('ignore_result', 'task_ignore_result'),
('store_errors_even_if_ignored', 'task_store_errors_even_if_ignored'),
)
_backend = None # устанавливается свойством backend.# - Задачи привязаны лениво, поэтому конфигурация не задана
# - пока задача не будет использована
@classmethod
def bind (cls, app):
was_bound, cls .__ bound__ = cls .__ bound__, True
cls._app = app
conf = app.conf
cls._exec_options = None # очистить кеш опций
если cls.typing - None:
cls.typing = app.strict_typing
для attr_name, config_name в cls.from_config:
если getattr (cls, attr_name, None) равно None:
setattr (cls, attr_name, conf [config_name])
# украсить аннотациями из config.если не was_bound:
cls.annotate ()
из celery.utils.threads импортировать LocalStack
cls.request_stack = LocalStack ()
# PeriodicTask использует это, чтобы добавить себя в расписание PeriodicTask.
cls.on_bound (приложение)
вернуть приложение
[документы] @classmethod
def on_bound (cls, app):
"" "Вызывается, когда задача привязана к приложению.
Примечание:
Этот метод класса можно определить для выполнения дополнительных действий, когда
класс задачи привязан к приложению."" "
@classmethod
def _get_app (cls):
если cls._app равно None:
cls._app = current_app
если не cls .__ bound__:
# Метод __set__ свойства приложения не вызывается
# если Task.app установлен (в классе), поэтому должен связываться при использовании.
cls.bind (cls._app)
вернуть cls._app
app = class_property (_get_app, привязка)
@classmethod
def annotate (cls):
для d в resolve_all_annotations (cls.app.annotations, cls):
для ключа значение в d.Предметы():
если key.startswith ('@'):
cls.add_around (ключ [1:], значение)
еще:
setattr (cls, ключ, значение)
@classmethod
def add_around (cls, attr, around):
ориг = getattr (cls, attr)
если getattr (orig, '__wrapped__', None):
ориг = ориг .__ завернутый__
мет = около (ориг)
мет .__ завернутый__ = ориг.
setattr (cls, attr, meth)
def __call __ (self, * args, ** kwargs):
_task_stack.push (самостоятельно)
себя.push_request (args = args, kwargs = kwargs)
пытаться:
вернуть self.run (* args, ** kwargs)
наконец-то:
self.pop_request ()
_task_stack.pop ()
def __reduce __ (сам):
# - задачи вписываются только в название задачи, а получатель
# - просто берет его из локального реестра.
# - в более поздних версиях также включен модуль задачи,
# - и принимающая сторона пытается импортировать этот модуль, чтобы
# - будет работать, даже если задача не была зарегистрирована.мод = тип (сам) .__ модуль__
mod = mod, если мод и мод в sys.modules else Нет
return (_unpickle_task_v2, (self.name, mod), None)
[документы] def run (self, * args, ** kwargs):
"" "Основная часть задачи, выполненной рабочими." ""
Raise NotImplementedError ('Задачи должны определять метод выполнения.')
def start_strategy (я, приложение, потребитель, ** kwargs):
return instantiate (self.Strategy, self, app, consumer, ** kwargs)
[документы] def delay (self, * args, ** kwargs):
"" "Версия звездного аргумента: meth:` apply_async`.Не поддерживает дополнительные параметры, включенные: meth: `apply_async`.
Аргументы:
* args (Любой): позиционные аргументы, передаваемые задаче.
** kwargs (Любой): аргументы ключевого слова, переданные задаче.
Возврат:
celery.result.AsyncResult: обещание на будущее.
"" "
вернуть self.apply_async (аргументы, kwargs)
[docs] def apply_async (self, args = None, kwargs = None, task_id = None, продюсер = None,
link = None, link_error = None, shadow = None, ** параметры):
"" "Применяйте задачи асинхронно, отправив сообщение.Аргументы:
args (Tuple): позиционные аргументы, передаваемые задаче.
kwargs (Dict): аргументы ключевого слова, передаваемые задаче.
обратный отсчет (с плавающей запятой): количество секунд в будущем, на которое
задача должна выполняться. По умолчанию выполняется немедленное выполнение.
eta (~ datetime.datetime): Абсолютное время и дата, когда задача
должен быть выполнен. Может не указываться, если `countdown`
также поставляется.истекает (float, ~ datetime.datetime): Datetime или
секунд в будущем для задачи должен истечь.
По истечении срока действия задача не будет выполнена.
shadow (str): переопределить имя задачи, используемое в журналах / мониторинге.
По умолчанию берется из: meth: `shadow_name`.
соединение (kombu.Connection): повторно использовать существующее соединение с брокером
вместо получения одного из пула соединений.
retry (bool): если включено, отправка сообщения о задаче будет
повторить попытку в случае потери или сбоя соединения.По умолчанию берется из: setting: `task_publish_retry`
параметр. Обратите внимание, что вам нужно обрабатывать
производитель / соединение вручную, чтобы это работало.
retry_policy (Mapping): переопределить используемую политику повтора.
См. Параметр: setting: `task_publish_retry_policy`.
queue (str, kombu.Queue): очередь, в которую направляется задача.
Это должен быть ключ, присутствующий в: setting: `task_queues`, или
: setting: `task_create_missing_queues` должен быть
включено.См .: ref: `guide-routing` для получения дополнительной информации.
Информация.
exchange (str, kombu.Exchange): именованный пользовательский обмен для отправки
задача. Обычно не используется в сочетании с `` очередью ''
аргумент.
routing_key (str): настраиваемый ключ маршрутизации, используемый для перенаправления задачи на
рабочий сервер. Если в сочетании с аргументом `` очередь ''
используется только для указания настраиваемых ключей маршрутизации для тематических обменов.
priority (int): приоритет задачи, число от 0 до 9.По умолчанию используется атрибут: attr: `priority`.
сериализатор (str): метод сериализации для использования.
Может быть pickle, json, yaml, msgpack или любой другой.
зарегистрированный метод сериализации
с помощью: mod: `kombu.serialization.registry`.
По умолчанию используется атрибут: attr: `serializer`.
сжатие (str): необязательный метод сжатия
использовать. Может быть одним из zlib, bzip2,
или любые пользовательские методы сжатия, зарегистрированные с
: func: `комбу.сжатие. регистр`.
По умолчанию используется параметр: setting: `task_compression`.
ссылка (Подпись): отдельная подпись или список задач
применить, если задача вернулась успешно.
link_error (Signature): отдельная подпись или список подписей задач.
применить, если при выполнении задачи произошла ошибка.
производитель (kombu.Producer): настраиваемый производитель для использования при публикации
задание.
add_to_parent (bool): если установлено значение True (по умолчанию) и задача
применяется при выполнении другой задачи, то результат
будет добавлен к запросу родительских задач.дети
атрибут. Трейлинг также можно отключить по умолчанию с помощью
: attr: атрибут `trail`
publisher (kombu.Producer): устаревший псевдоним `` продюсер ''.
заголовки (Dict): заголовки сообщений, которые будут включены в сообщение.
Возврат:
celery.result.AsyncResult: обещание будущей оценки.
Повышает:
TypeError: если передано недостаточно аргументов или слишком много
аргументы передаются. Обратите внимание, что проверка подписи может
можно отключить, указав @task (typing = False).kombu.exceptions.OperationalError: Если подключение к
транспорт не может быть осуществлен, или если связь потеряна.
Примечание:
Также поддерживает все аргументы ключевых слов, поддерживаемые
: meth: `kombu.Producer.publish`.
"" "
если самонабор:
пытаться:
check_arguments = self .__ header__
кроме AttributeError: # pragma: no cover
проходить
еще:
check_arguments (* (аргументы или ()), ** (kwargs или {}))
если сам.__v2_compat__:
shadow = shadow или self.shadow_name (self (), args, kwargs, параметры)
еще:
shadow = shadow или self.shadow_name (аргументы, kwargs, параметры)
preopts = self._get_exec_options ()
options = dict (preopts, ** options) если варианты else preopts
options.setdefault ('ignore_result', self.ignore_result)
если собственный приоритет:
options.setdefault ('приоритет', собственный приоритет)
app = self._get_app ()
если app.conf.task_always_eager:
с приложением.Producer_or_acquire (продюсер) как eager_producer:
сериализатор = options.get ('сериализатор')
если сериализатор None:
если eager_producer.serializer:
сериализатор = eager_producer.serializer
еще:
сериализатор = app.conf.task_serializer
body = args, kwargs
content_type, content_encoding, data = serialization.dumps (
тело, сериализатор,
)
args, kwargs = сериализация.нагрузки (
данные, content_type, content_encoding,
accept = [content_type]
)
с denied_join_result ():
вернуть self.apply (args, kwargs, task_id = task_id или uuid (),
link = link, link_error = link_error, ** параметры)
еще:
вернуть app.send_task (
self.name, args, kwargs, task_id = task_id, продюсер = производитель,
link = ссылка, link_error = link_error, result_cls = self.AsyncResult,
тень = тень, task_type = self,
**параметры
)
[документы] def shadow_name (self, args, kwargs, параметры):
"" "Переопределение имени настраиваемой задачи в журналах / мониторинге рабочих.
Пример:
.. кодовый блок :: python
from celery.utils.imports import qualname
def shadow_name (задача, аргументы, kwargs, параметры):
вернуть qualname (args [0])
@ app.task (shadow_name = shadow_name, serializer = 'рассол')
def apply_function_async (fun, * args, ** kwargs):
вернуть удовольствие (* args, ** kwargs)
Аргументы:
args (Tuple): позиционные аргументы задачи.kwargs (Dict): аргументы ключевого слова задачи.
options (Dict): параметры выполнения задачи.
"" "
def signature_from_request (self, request = None, args = None, kwargs = None,
queue = None, ** extra_options):
request = self.request, если запрос - None else request
args = request.args, если args равен None else args
kwargs = request.kwargs, если kwargs - это None else kwargs
options = request.as_execution_options ()
delivery_info = запрос.delivery_info или {}
priority = delivery_info.get ('приоритет')
если приоритет не равен None:
опции ['priority'] = приоритет
если очередь:
options ['queue'] = очередь
еще:
exchange = delivery_info.get ('обмен')
routing_key = delivery_info.get ('routing_key')
если exchange == '' и routing_key:
# отправлено на обмен
options ['queue'] = routing_key
еще:
параметры.обновление (delivery_info)
вернуть self.signature (
args, kwargs, options, type = self, ** extra_options
)
subtask_from_request = signature_from_request # XXX совместимость
[docs] def retry (self, args = None, kwargs = None, exc = None, throw = True,
eta = Нет, обратный отсчет = Нет, max_retries = Нет, ** варианты):
"" "Повторите попытку, добавив ее в конец очереди.
Пример:
>>> из imaginary_twitter_lib импортировать Twitter
>>> от проекта.приложение для импорта сельдерея
>>> @ app.task (bind = True)
... def tweet (self, auth, message):
... twitter = Twitter (oauth = auth)
... пытаться:
... twitter.post_status_update (сообщение)
... кроме twitter.FailWhale как exc:
... # Повторите попытку через 5 минут.
... self.retry (обратный отсчет = 60 * 5, exc = exc)
Примечание:
Хотя задача никогда не вернется выше, поскольку `retry` вызывает
исключение, чтобы уведомить работника, мы используем `raise` перед
повторите попытку, чтобы сообщить, что остальная часть блока не будет выполнена.Аргументы:
args (кортеж): позиционные аргументы для повторной попытки.
kwargs (Dict): аргументы ключевого слова для повторной попытки.
exc (Exception): настраиваемое исключение для сообщения о максимальном количестве повторных попыток.
предел был превышен (по умолчанию:
: exc: `~ @ MaxRetriesExceededError`).
Если этот аргумент установлен и повторная попытка вызывается, пока
возникло исключение (установлено `` sys.exc_info () '')
он попытается повторно вызвать текущее исключение.Если исключение не возникло, будет поднята ошибка exc.
предоставленный аргумент.
обратный отсчет (с плавающей точкой): время в секундах, на которое нужно отложить повторную попытку.
eta (~ datetime.datetime): явное время и дата для запуска
повторить попытку.
max_retries (int): если установлено, отменяет лимит повторных попыток по умолчанию для
это исполнение. Изменения этого параметра не распространяются на
последующие попытки повторения задачи. Значение: const: `None`,
означает "использовать значение по умолчанию", поэтому, если вы хотите бесконечное количество повторных попыток, вы должны
необходимо установить для атрибута: attr: `max_retries` задачи значение
: const: Сначала `None`.time_limit (int): если установлено, отменяет ограничение по времени по умолчанию.
soft_time_limit (int): если установлено, отменяет стандартное soft
лимит времени.
throw (bool): Если это: const: `False`, не поднимайте
: exc: исключение `~ @ Retry`, которое сообщает рабочему процессу пометить
задача повторяется. Обратите внимание, что это означает, что задача
будет помечен как неудачный, если задача вызывает исключение,
или успешно, если он возвращается после повторного вызова.** options (Any): Дополнительные параметры для передачи: meth: `apply_async`.
Повышает:
celery.exceptions.Retry:
Чтобы сообщить работнику, что задача была повторно отправлена на повторную попытку.
Это всегда происходит, если только аргумент ключевого слова `throw`
был явно установлен на: const: `False` и считается
Нормальная операция.
"" "
request = self.request
retries = request.retries + 1
если max_retries не равно None:
себя.override_max_retries = max_retries
max_retries = self.max_retries, если max_retries равно None else max_retries
# Не в worker и не эмулируется (apply / always_eager),
# так что просто вызовите исходное исключение.
если request.called_directly:
# поднимает исходный стек, если PyErr_Occurred,
# и дополняется на exc ', если этот аргумент определен.
Raise_with_context (exc или Retry ('Задача может быть повторена', Нет))
если не эта, а обратный отсчет - Нет:
обратный отсчет = сам.default_retry_delay
is_eager = request.is_eager
S = self.signature_from_request (
запрос, аргументы, kwargs,
countdown = обратный отсчет, eta = eta, retries = retries,
**параметры
)
если max_retries не равно None и повторяет попытки> max_retries:
если отлично:
# На Py3: добавит к любому текущему исключению
# указан аргумент exc '(поднять exc из исходной точки)
Raise_with_context (исключение)
поднять себя.MaxRetriesExceededError (
«Невозможно повторить попытку {} [{}] args: {} kwargs: {}". Format (
self.name, request.id, S.args, S.kwargs
), task_args = S.args, task_kwargs = S.kwargs
)
ret = Retry (exc = exc, when = eta или обратный отсчет, is_eager = is_eager, sig = S)
если is_eager:
# если задача была выполнена с нетерпением с помощью apply (),
# тогда повторная попытка также должна выполняться с нетерпением в методе apply
если бросить:
поднять ret
возвратиться
пытаться:
С.apply_async ()
кроме исключения как exc:
поднять Отклонить (exc, Requeue = False)
если бросить:
поднять ret
возвратиться
[docs] def apply (self, args = None, kwargs = None,
link = None, link_error = None,
task_id = None, retries = None, throw = None,
logfile = None, loglevel = None, headers = None, ** параметры):
"" "Выполнить эту задачу локально, заблокировав ее до тех пор, пока задача не вернется.
Аргументы:
args (Tuple): позиционные аргументы, передаваемые задаче.kwargs (Dict): аргументы ключевого слова, переданные задаче.
throw (bool): повторно вызывать исключения задачи.
По умолчанию используется параметр: setting: `task_eager_propagates`.
Возврат:
celery.result.EagerResult: предварительно оцененный результат.
"" "
# trace import Task, поэтому необходимо импортировать inline.
из celery.app.trace import build_tracer
app = self._get_app ()
args = args или ()
kwargs = kwargs или {}
task_id = task_id или uuid ()
retries = retries или 0
если throw равен None:
бросить = приложение.conf.task_eager_propagates
# Убедитесь, что мы получили экземпляр задачи, а не класс.
task = app._tasks [self.name]
request = {
'id': task_id,
'retries': повторные попытки,
'is_eager': Верно,
'файл журнала': файл журнала,
'loglevel': loglevel или 0,
'имя хоста': gethostname (),
'callbacks': might_list (ссылка),
'errbacks': may_list (link_error),
'заголовки': заголовки,
'delivery_info': {'is_eager': True},
}
tb = Нет
tracer = build_tracer (
задача.name, task, eager = True,
распространять = бросить, приложение = self._get_app (),
)
ret = tracer (идентификатор_задачи, аргументы, kwargs, запрос)
retval = ret.retval
если isinstance (retval, ExceptionInfo):
retval, tb = retval.exception, retval.traceback
если isinstance (retval, Retry) и retval.sig не None:
вернуть retval.sig.apply (retries = retries + 1)
state = States.SUCCESS, если ret.info равен None else ret.info.state
вернуть EagerResult (task_id, retval, state, traceback = tb)
[документы] def AsyncResult (self, task_id, ** kwargs):
"" "Получить экземпляр AsyncResult для указанной задачи.Аргументы:
task_id (str): идентификатор задачи, для которой требуется получить результат.
"" "
return self._get_app (). AsyncResult (task_id, backend = self.backend,
task_name = self.name, ** kwargs)
[документы] def подпись (self, args = None, * starargs, ** starkwargs):
"" "Создать подпись.
Возврат:
: class: `~ celery.signature`: объект для
эта задача, упаковывая аргументы и параметры выполнения
для вызова одной задачи."" "
starkwargs.setdefault ('приложение', self.app)
обратная подпись (self, args, * starargs, ** starkwargs)
подзадача = подпись
[документы] def s (self, * args, ** kwargs):
"" "Создать подпись.
Ярлык для `` .s (* a, ** k) -> .signature (a, k) ''.
"" "
вернуть self.signature (args, kwargs)
[документы] def si (self, * args, ** kwargs):
"" "Создать неизменяемую подпись.
Ярлык для `` .si (* a, ** k) -> .signature (a, k, immutable = True) ''.
"" "
вернуть себя.подпись (args, kwargs, immutable = True)
[документы] def chunks (self, it, n):
"" "Создайте задачу: class:` ~ celery.canvas.chunks` для этой задачи. "" "
из импортных кусков сельдерея
вернуть фрагменты (self.s (), it, n, app = self.app)
[документы] def map (self, it):
"" "Создайте задачу: class:` ~ celery.canvas.xmap` из `` it``. "" "
из сельдерея импорта xmap
вернуть xmap (self.s (), it, app = self.app)
[документы] def starmap (self, it):
"" "Создайте задачу: class:` ~ celery.canvas.xstarmap` из `it`."" "
из сельдерея импортный xstarmap
вернуть xstarmap (self.s (), it, app = self.app)
[документы] def send_event (self, type_, retry = True, retry_policy = None, ** поля):
"" "Отправить сообщение о событии мониторинга.
Это можно использовать для добавления пользовательских типов событий в: pypi: `Flower`
и другие мониторы.
Аргументы:
type_ (str): Тип события, например `` "задача не выполнена" `.
Аргументы ключевого слова:
retry (bool): повторить попытку отправки сообщения
если связь потеряна.По умолчанию берется из
: setting: параметр `task_publish_retry`.
retry_policy (Mapping): повторить настройки. По умолчанию взят
из настройки: setting: `task_publish_retry_policy`.
** поля (Любые): Карта, содержащая информацию о событии.
Должен быть сериализуемым в формате JSON.
"" "
req = self.request
если retry_policy - None:
retry_policy = self.app.conf.task_publish_retry_policy
с self.app.events.default_dispatcher (hostname = req.hostname) как d:
вернуть d.send (
тип_,
uuid = req.id, retry = retry, retry_policy = retry_policy, ** поля)
[документы] def replace (self, sig):
"" "Замените эту задачу новой задачей, наследующей идентификатор задачи.
Выполнение основной задачи прекращается немедленно, и никаких последующих операторов
будет запущен.
.. добавлена версия :: 4.0
Аргументы:
sig (~ @ Подпись): подпись, которую нужно заменить.
Повышает:
~ @ Ignore: всегда возникает при вызове в асинхронном контексте.Лучше всегда использовать `` return self.replace (...) '' для передачи
читателю, что задача не продолжится после замены.
"" "
аккорд = self.request.chord
если в параметрах сигн. 'аккорд':
поднять неправильно настроенный (
«Подпись, заменяющая задачу, не должна быть частью аккорда»
)
если isinstance (sig, group):
sig | = self.app.tasks ['celery.accumulate']. s (index = 0) .set (
ссылка = self.request.обратные вызовы,
link_error = self.request.errbacks,
)
elif isinstance (sig, _chain):
если не sig.tasks:
поднять неправильно настроенный (
«Невозможно заменить пустой цепочкой»
)
если self.request.chain:
# Нам нужно заморозить новую подпись с идентификатором текущей задачи, чтобы
# убедитесь, что мы не отделяем новую цепочку от существующей
# идентификатора задач, которые могут нарушить построенные ранее результаты
# объекты.sig.freeze (self.request.id)
если "ссылка" в sig.options:
final_task_links = sig.tasks [-1] .options.setdefault ("ссылка", [])
final_task_links.extend (might_list (sig.options ["ссылка"]))
# Создайте новую оставшуюся часть задачи, связав подпись
# нас заменяют на подписи, построенные из
# цепочки элементов в текущем запросе.
для t в обратном порядке (self.request.chain):
sig | = подпись (t, app = self.приложение)
sig.set (
аккорд = аккорд,
group_id = self.request.group,
group_index = self.request.group_index,
root_id = self.request.root_id,
)
sig.freeze (self.request.id)
если self.request.is_eager:
вернуть sig.apply (). get ()
еще:
sig.delay ()
поднять Ignore ('Заменено новой задачей')
[документы] def add_to_chord (self, sig, lazy = False):
"" "Добавить подпись к аккорду, членом которого является текущая задача... добавлена версия :: 4.0
В настоящее время поддерживается только серверной частью результатов Redis.
Аргументы:
sig (~ @ Подпись): Подпись, с помощью которой будет продолжен аккорд.
lazy (bool): если включено, новая задача фактически не будет вызываться,
и sig.delay () необходимо вызывать вручную.
"" "
если не self.request.chord:
Raise ValueError ('Текущая задача не входит ни в один аккорд')
sig.set (
group_id = self.request.group,
group_index = self.request.group_index,
аккорд = self.request.chord,
root_id = self.request.root_id,
)
результат = sig.freeze ()
self.backend.add_to_chord (self.request.group, результат)
вернуть sig.delay (), если не ленив, иначе sig
[документы] def update_state (self, task_id = None, state = None, meta = None, ** kwargs):
"" "Обновить состояние задачи.
Аргументы:
task_id (str): идентификатор задачи для обновления.
По умолчанию используется идентификатор текущей задачи.
state (str): Новое состояние.meta (Dict): метаданные состояния.
"" "
если task_id - None:
task_id = self.request.id
self.backend.store_result (task_id, meta, state, request = self.request, ** kwargs)
[документы] def on_success (self, retval, task_id, args, kwargs):
"" "Обработчик успеха.
Запускается работником, если задача выполняется успешно.
Аргументы:
retval (Any): возвращаемое значение задачи.
task_id (str): Уникальный идентификатор выполненной задачи.
args (Tuple): исходные аргументы для выполняемой задачи.kwargs (Dict): исходные ключевые аргументы для выполняемой задачи.
Возврат:
Нет: возвращаемое значение этого обработчика игнорируется.
"" "
[документы] def on_retry (self, exc, task_id, args, kwargs, einfo):
"" "Обработчик повтора.
Это выполняется работником, когда задача должна быть повторена.
Аргументы:
exc (Исключение): исключение отправлено на: meth: `retry`.
task_id (str): уникальный идентификатор повторной задачи.
args (Tuple): исходные аргументы для повторной задачи.kwargs (Dict): исходные аргументы ключевого слова для повторной задачи.
einfo (~ billiard.einfo.ExceptionInfo): информация об исключении.
Возврат:
Нет: возвращаемое значение этого обработчика игнорируется.
"" "
[документы] def on_failure (self, exc, task_id, args, kwargs, einfo):
"" "Обработчик ошибок.
Это выполняется работником, когда задача не выполняется.
Аргументы:
exc (Exception): исключение, вызванное задачей.
task_id (str): уникальный идентификатор неудавшейся задачи.args (кортеж): исходные аргументы для задачи, которая не удалась.
kwargs (Dict): исходные аргументы ключевого слова для задачи, которая не удалась.
einfo (~ billiard.einfo.ExceptionInfo): информация об исключении.
Возврат:
Нет: возвращаемое значение этого обработчика игнорируется.
"" "
[документы] def after_return (self, status, retval, task_id, args, kwargs, einfo):
"" "Обработчик, вызываемый после возврата задачи.
Аргументы:
status (str): Текущее состояние задачи.retval (Any): возвращаемое значение задачи / исключение.
task_id (str): Уникальный идентификатор задачи.
args (Tuple): исходные аргументы задачи.
kwargs (Dict): исходные ключевые аргументы для задачи.
einfo (~ billiard.einfo.ExceptionInfo): информация об исключении.
Возврат:
Нет: возвращаемое значение этого обработчика игнорируется.
"" "
def add_trail (self, результат):
если self.trail:
self.request.children.append (результат)
вернуть результат
def push_request (self, * args, ** kwargs):
себя.request_stack.push (Контекст (* аргументы, ** kwargs))
def pop_request (сам):
self.request_stack.pop ()
def __repr __ (сам):
"" "` `repr (задача)`. "" "
return _reprtask (self, R_INSTANCE)
def _get_request (сам):
"" "Получить текущий объект запроса." ""
req = self.request_stack.top
если req равно None:
# задача не была вызвана, но некоторые все еще могут ожидать запроса
# быть там, возможно, это не рекомендуется.
если self._default_request равен None:
себя._default_request = Контекст ()
вернуть self._default_request
запрос на возврат
запрос = свойство (_get_request)
def _get_exec_options (самостоятельно):
если self._exec_options равно None:
self._exec_options = extract_exec_options (сам)
вернуть self._exec_options
@имущество
def backend (сам):
backend = self._backend
если бэкэнд None:
вернуть self.app.backend
вернуть бэкэнд
@ backend.setter
def backend (self, value): # noqa
себя._backend = значение
@имущество
def __name __ (сам):
вернуть self .__ class __.__ name__
BaseTask = Task # noqa: E305 XXX compat псевдоним
Выполнение задач — документация Celery 2.4.7
Выполнение задачи выполняется с помощью apply_async () ,
и ярлык: delay () .
задержка проста и удобна, так как это похоже на вызов обычного функция:
Task.delay (arg1, arg2, kwarg1 = "x", kwarg2 = "y")
То же самое с использованием apply_async записывается так:
Задача.apply_async (args = [arg1, arg2], kwargs = {"kwarg1": "x", "kwarg2": "y"})
Хотя задержка удобна, она не дает такого контроля, как использование apply_async . С помощью apply_async вы можете переопределить параметры выполнения доступны как атрибуты в классе Task (см. Параметры задачи). Кроме того, вы можете установить обратный отсчет / eta, срок действия задачи, предоставить настраиваемого брокера подключение и многое другое.
Давайте рассмотрим их подробнее. Во всех примерах используется простая задача называется добавить , возвращая сумму двух позиционных аргументов:
@task
def add (x, y):
вернуть x + y
Примечание
Вы также можете выполнить задачу по имени, используя send_task () , если у вас нет доступа к
класс задачи:
>>> из сельдерея.выполнить импорт send_task
>>> result = send_task ("tasks.add", [2, 2])
>>> result.get ()
4
Расчетное время прибытия (расчетное время прибытия) позволяет установить конкретную дату и время, когда это самое раннее время, когда ваша задача будет выполнена. обратный отсчет ярлык для установки eta на секунды в будущее.
>>> результат = add.apply_async (args = [10, 10], обратный отсчет = 3) >>> result.get () # возврат занимает не менее 3 секунд 20
Задача гарантированно будет выполнена в какой-то момент после указанная дата и время, но не обязательно в это время.Возможные причины срыва сроков могут включать в себя ожидание большого количества предметов в очереди или сильная сетевая задержка. Чтобы убедиться, что ваши задачи выполняются своевременно, вы должны следить за длиной очереди. Использовать Munin или аналогичные инструменты для получения предупреждений, чтобы можно было предпринять соответствующие действия. принято, чтобы облегчить рабочую нагрузку. См. Мунин.
В то время как обратный отсчет является целым числом, eta должен быть datetime объект, указав точную дату и время (включая точность до миллисекунды,
и информация о часовом поясе):
>>> from datetime import datetime, timedelta >>> завтра = дата и время.сейчас () + timedelta (дни = 1) >>> add.apply_async (args = [10, 10], eta = завтра)
Аргумент expires определяет необязательный срок действия,
либо в секундах после публикации задачи, либо в конкретной дате и времени с использованием datetime :
>>> # Срок действия задачи истекает через минуту. >>> add.apply_async (args = [10, 10], истекает = 60) >>> # Также поддерживает datetime >>> from datetime import datetime, timedelta >>> доп.apply_async (args = [10, 10], kwargs, ... истекает = datetime.now () + timedelta (дни = 1)
Когда работник получает просроченное задание, он отмечает
задача как REVOKED ( TaskRevokedError ).
Данные, передаваемые между клиентами и работниками, необходимо сериализовать.
Сериализатор по умолчанию — pickle , но вы можете
изменить это глобально или для каждой отдельной задачи.
Имеется встроенная поддержка pickle , JSON , YAML и msgpack , и вы также можете добавить свои собственные сериализаторы, зарегистрировав
их в реестр сериализатора Комбу (см. Комбу: Сериализация данных).
У каждого варианта есть свои достоинства и недостатки.
- json — JSON поддерживается на многих языках программирования, сейчас
стандартная часть Python (начиная с версии 2.6) и довольно быстро декодируется используя современные библиотеки Python, такие как
cjsonилиsimplejson.Основным недостатком JSON является то, что он ограничивает вас следующими типы данных: строки, Unicode, числа с плавающей запятой, логические, словари и списки. Примечательно отсутствие десятичных знаков и дат.
Также двоичные данные будут передаваться с использованием кодировки Base64, что привести к тому, что передаваемые данные будут примерно на 34% больше, чем кодировка, которая поддерживает собственные двоичные типы.
Однако, если ваши данные соответствуют указанным выше ограничениям и вам нужно кросс-языковая поддержка, настройка JSON по умолчанию, вероятно, ваша Лучший выбор.
См. Http://json.org для получения дополнительной информации.
- pickle — Если у вас нет желания поддерживать какой-либо язык, кроме
Python, тогда использование кодировки pickle даст вам поддержку все встроенные типы данных Python (кроме экземпляров классов), меньшего размера сообщения при отправке двоичных файлов и небольшое ускорение по сравнению с JSON обработка.
См. Http://docs.python.org/library/pickle.html для получения дополнительной информации.
- yaml — YAML имеет многие из тех же характеристик, что и json,
, за исключением того, что он изначально поддерживает больше типов данных (включая даты, рекурсивные ссылки и т. д.)
Однако библиотеки Python для YAML немного медленнее, чем библиотеки для JSON.
Если вам нужен более выразительный набор типов данных и необходимо поддерживать кросс-языковая совместимость, тогда YAML может быть лучше, чем указано выше.
См. Http://yaml.org/ для получения дополнительной информации.
- msgpack — msgpack — это двоичный формат сериализации, который ближе к JSON
в характеристиках. Однако он очень молод, и следует подумать о поддержке. экспериментальный на данный момент.
См. Http://msgpack.org/ для получения дополнительной информации.
Используемая кодировка доступна в качестве заголовка сообщения, поэтому работник знает, как десериализовать любую задачу. Если вы используете настраиваемый сериализатор, этот сериализатор должен быть доступным для рабочего.
Клиент использует следующий порядок, чтобы решить, какой сериализатор использовать при отправке задачи:
- Сериализатор аргумент для apply_async
- Задачи сериализатор атрибут
- Значение по умолчанию
CELERY_TASK_SERIALIZER.
- Использование аргумента сериализатора для apply_async :
>>> add.apply_async (args = [10, 10], serializer = "json")
Автоматическая поддержка пула
В версии 2.3 добавлена поддержка пулов автоматических подключений, так что вам не придется вручную обрабатывать связи и издателей для повторного использования соединений.
См. Настройку BROKER_POOL_LIMIT .
Этот параметр будет включен по умолчанию в версии 3.0.
Вы можете управлять подключением вручную, создавая издатель:
числа = [(2, 2), (4, 4), (8, 8), (16, 16)]
результаты = []
publisher = add.get_publisher ()
пытаться:
для аргументов в числах:
res = add.apply_async (args = args, publisher = publisher)
полученные результаты.добавить (разрешение)
наконец-то:
publisher.close ()
publisher.connection.close ()
print ([res.get () для res в результатах])
Примечание
Этот конкретный пример лучше выразить как набор задач. См. Наборы задач. Наборы задач уже повторно используют соединения.
Тайм-аут соединения — это количество секунд ожидания перед отказом при установлении соединения. Вы можете установить это, используя connect_timeout аргумент для apply_async :
доб.apply_async ([10, 10], connect_timeout = 3)
Или, если вы обрабатываете соединение вручную:
издатель = add.get_publisher (connect_timeout = 3)
Celery использует механизмы маршрутизации AMQP для маршрутизации задач различным исполнителям.
Сообщения (задачи) отправляются на биржи, очередь привязывается к обмену с ключ маршрутизации. Давайте посмотрим на пример:
Представим, что у нас есть приложение с множеством разных задач: некоторые обрабатывают видео, другие обрабатывают изображения, а некоторые собирают коллективный разум о своих пользователях.Некоторые из этих задач более важны, поэтому мы хотим сделать убедитесь, что задачи с высоким приоритетом отправляются на выделенные узлы.
Для этого примера у нас есть единственная биржа с именем задач . Существуют разные типы обменов, каждый из которых интерпретирует маршрутизацию. key по-разному, реализуя разные сценарии обмена сообщениями.
Наиболее распространенными типами, используемыми с Celery, являются direct и topic .
прямой
Точно соответствует ключу маршрутизации.
тема
В теме обмена ключ маршрутизации состоит из слов, разделенных точек (. ). Слова могут быть сопоставлены подстановочными знаками * и # , где * соответствует одному точному слову, а # соответствует одному или нескольким словам.
Например, * .stock. # соответствует ключам маршрутизации usd.stock и euro.stock.db , но не stock.nasdaq .
Мы создаем три очереди, видео , изображение и lowpri , который привязывается к задач обмен.Для очередей мы используем следующие ключи привязки:
видео: видео. # изображение: изображение. # lowpri: разное #
Теперь мы можем отправлять наши задачи на разные рабочие машины, заставляя рабочих слушать в разных очередях:
>>> add.apply_async (args = [имя файла], ... routing_key = "video.compress") >>> add.apply_async (args = [имя файла, 360], ... routing_key = "image.rotate") >>> add.apply_async (args = [имя файла, выбор], ... routing_key = "image.crop") >>> add.apply_async (routing_key = "misc.recommend")
Позже, если задача урожая потребляет много ресурсов, мы можем привязать новых работников к обработке только задачи «image.crop» , путем создания новой очереди, которая привязывается к «image.crop ».
См. Также
Чтобы узнать больше о маршрутизации, см. Задачи маршрутизации.
Устанавливает обязательную доставку. Будет возбуждено исключение если нет работающих рабочих, способных взять на себя задачу.
Не поддерживается amqplib .
Запросить немедленную доставку. Вызовет исключение если задача не может быть немедленно направлена работнику.
Не поддерживается amqplib .
Число от 0 до 9 , где 0 является наивысшим приоритетом.
Примечание
RabbitMQ еще не поддерживает приоритеты AMQP.
【已 解决】 celery 调用 task 的 apply_async 传递 参数 出错 : TypeError принимает 1 позиционный аргумент, но было задано 40 — 路上
折腾 :
【已 解决】 Mac 本地 用 Celery 实现 延时 执行 任务
9000用2 期间代码 : # celery_task.ру
из сельдерея импортный Сельдерей
импорт ОС
# app = Celery ('задачи', брокер = 'redis: // localhost //')
app = Celery ('задачи', брокер = 'redis: // localhost')
@ app.task ()
def add (x, y):
вернуть x + y
@ app.task ()
def deleteTmpAudioFile (имя файла):
# audioTmpFolder = app.config ["AUDIO_TEMP_FOLDER"]
print ("deleteTmpAudioFile: filename =% s", filename)
audioTmpFolder = "tmp / audio"
print ("audioTmpFolder =% s"% audioTmpFolder)
curFolderAbsPath = os.getcwd () # '/ Users / crifan / dev / dev_root / company / naturling / projects / robotDemo / server'
print ("curFolderAbsPath =% s"% curFolderAbsPath)
audioTmpFolderFullPath = os.path.join (curFolderAbsPath, audioTmpFolder)
print ("audioTmpFolderFullPath =% s"% audioTmpFolderFullPath)
tempAudioFullname = os.path.join (audioTmpFolderFullPath, имя файла)
# '/ Users / crifan / dev / dev_root / company / naturling / projects / robotDemo / server / tmp / audio / 2aba73d1-f8d0-4302-9dd3-d1dbfad44458.mp3'
если os.path.isfile (tempAudioFullname):
os.remove (tempAudioFullname)
print ("Хорошо, чтобы удалить файл% s"% tempAudioFullname)
еще:
print ("Нет необходимости удалять, если файл% s не существует"% tempAudioFullname)
然后 参考 :
异步 任务 神器 Сельдерей | FunHacks
сельдерей.app.task — документация Celery 4.1.0
去 调用 , 结果 出错
➜ server python
Python 3.6.4 (по умолчанию, 22 марта 2018 г., 13:54:22)
[GCC 4.2.1 совместимый Apple LLVM 9.0.0 (clang-900.0.39.2)] на darwin
Для получения дополнительной информации введите «помощь», «авторские права», «кредиты» или «лицензия».
& gt; & gt; & gt; import celery_task
& gt; & gt; & gt; from celery_task import deleteTmpAudioFile
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (args = ("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3"), обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/ Пользователи / crifan /.local / share / virtualenvs / server-9an_1rEM / lib / python3.6 / site-packages / celery / app / task.py ", строка 518, в apply_async
check_arguments (* (аргументы или ()), ** (kwargs или {}))
TypeError: deleteTmpAudioFile () принимает 1 позиционный аргумент, но было дано 40
换成 :
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (args = "98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3", обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/ Пользователи / crifan /.local / share / virtualenvs / server-9an_1rEM / lib / python3.6 / site-packages / celery / app / task.py ", строка 518, в apply_async
check_arguments (* (аргументы или ()), ** (kwargs или {}))
TypeError: deleteTmpAudioFile () принимает 1 позиционный аргумент, но было дано 40
继续 :
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (args = {"filename": "98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3"}, обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/ Пользователи / crifan /.local / share / virtualenvs / server-9an_1rEM / lib / python3.6 / site-packages / celery / app / task.py ", строка 536, в apply_async
**параметры
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/base.py", строка 729, в send_task
root_id, parent_id, тень, цепочка,
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/amqp.py", строка 316, в as_task_v2
поднять TypeError ('аргументы задачи должны быть списком или кортежем')
TypeError: аргументы задачи должны быть списком или кортежем
* args (кортеж) — позиционные аргументы, передаваемые задаче.
* kwargs (Dict) — аргументы ключевого слова, передаваемые задаче.
celery apply_async TypeError принимает 1 позиционный аргумент, но 40 задано
celery apply_async TypeError принимает 1 позиционный аргумент
python — TypeError: method () принимает 1 позиционный аргумент, но дано 2 — Stack Overflow
celery apply_async 9000 参数
sora # celery 笔记 —— вызовите задачу — Hochikong 的 Blog
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (args = "98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3", обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/task.py", строка 518, в apply_async
check_arguments (* (аргументы или ()), ** (kwargs или {}))
TypeError: deleteTmpAudioFile () принимает 1 позиционный аргумент, но было дано 40
& gt; & gt; & gt; deleteTmpAudioFile.SyntaxError: недопустимый синтаксис
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3"), обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/task.py", строка 518, в apply_async
check_arguments (* (аргументы или ()), ** (kwargs или {}))
TypeError: deleteTmpAudioFile () принимает 1 позиционный аргумент, но было дано 40
& gt; & gt; & gt; deleteTmpAudioFile.apply_async ("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3", обратный отсчет = 10)
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/task.py", строка 518, в apply_async
check_arguments (* (аргументы или ()), ** (kwargs или {}))
TypeError: deleteTmpAudioFile () принимает 1 позиционный аргумент, но было дано 40
& gt; & gt; & gt; deleteTmpAudioFile.apply_async ("а")
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/task.py", строка 536, в apply_async
**параметры
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/base.py", строка 729, в send_task
root_id, parent_id, тень, цепочка,
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6 / site-packages / celery / app / amqp.py ", строка 316, в as_task_v2
поднять TypeError ('аргументы задачи должны быть списком или кортежем')
TypeError: аргументы задачи должны быть списком или кортежем
始终 不行。
сельдерей apply_async 用法
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (("а"))
Отслеживание (последний вызов последний):
Файл "& lt; stdin & gt;", строка 1, в & lt; module & gt;
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/task.py ", строка 536, в apply_async
**параметры
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/base.py", строка 729, в send_task
root_id, parent_id, тень, цепочка,
Файл "/Users/crifan/.local/share/virtualenvs/server-9an_1rEM/lib/python3.6/site-packages/celery/app/amqp.py", строка 316, в as_task_v2
поднять TypeError ('аргументы задачи должны быть списком или кортежем')
TypeError: аргументы задачи должны быть списком или кортежем
最后 改为 list 终于 可以 了 :
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (["98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3"], обратный отсчет = 10)
& lt; AsyncResult: 53608319-b87f-4f06-8483-e8f7d1c99632 & gt;
【总结】
最后 的 最后 , 终于 搞清楚
& gt; & gt; & gt; deleteTmpAudioFile.apply_async (("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3",), обратный отсчет = 10)
& lt; AsyncResult: bd89951c-2078-49af-b8ea-8c9d8d5b121a & gt;
可以 的。
而 对于 之前 的 提示 :
TypeError: аргументы задачи должны быть списком или кортежем.
指 的 是 : apply_async 的 参数 , 第 一个 args , 必须 是 args , 必须 args ,或 list
所以 传递 参数 , list 写成 :
["98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3 "]
是 可以 的。
而 此处 , 之所以 :
("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3")
不行 , 而 :
("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3",)
却 是 可以 的。
去 测试 了 下 , 才 明白 :
& gt; & gt; & gt; тип (("abc"))
& lt; класс 'str' & gt;
& gt; & gt; & gt; тип (("abc",))
& lt; класс "кортеж" & gt;
很 明显 , python 中 对于 :
("abc")
会 被 识别 为 字符串
而
("abc",)
被 识别 tuple。
所以 , 此处 写成 :
list 的 :
deleteTmpAudioFile.apply_async (["98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3"], обратный отсчет = 10)
tuple 的 :
deleteTmpAudioFile.apply_async (("98fc7c46-7aa0-4dd7-aa9d-89fdf516abd6.mp3",), обратный отсчет = 10)
才 可以。
转载 请 注明 : 在 路上 »【已 解决】 celery 调用 task 的 apply_async 传递 参数 出错 TypeError принимает 1 позиционный аргумент, но 40 было задано
Могу я спросить, это тоже одна ошибка? (я имею в виду, что если аргументов нет, но возникнет ошибка?) Код (invoke-0.22.1-py2.7.egg \ invoke \ tasks.py function: def argspec (self, body)): вывод: |
задач — Вызов документации
Этот модуль содержит основные декораторы классов и удобства Task , используемые для
генерировать новые задачи.
- class
invoke.tasks.Позвоните по номеру( задача , called_as = None , args = None , kwargs = None ) Представляет вызов / выполнение задачи
Taskс заданными аргументами (кВт).Аналогично
частичномус некоторыми дополнительными функциями (такими как делегирование внутренней задаче и необязательное отслеживание имени, которое она называется.)-
__init__( задача , called_as = None , args = None , kwargs = None ) Создайте новый объект
Call.Параметры: - задача — объект
Task, который должен быть выполнен. - called_as ( str ) — Имя, под которым вызывается задача, например если он был вызван
псевдоним или другое повторное связывание. По умолчанию
Нет, иначе задача была упоминается по его имени по умолчанию. - args ( кортеж ) — Позиционные аргументы для вызова, если есть. По умолчанию:
Нет. - kwargs ( dict ) — аргументы ключевого слова для вызова, если таковые имеются. По умолчанию:
Нет.
- задача — объект
-
__weakref__ список слабых ссылок на объект (если определен)
-
клон( в = Нет , с_ = Нет ) Верните отдельную копию этого звонка.
Полезно при параметризации выполнения задач.
Параметры: Изменено в версии 1.1: Добавлен
with_kwarg.
-
clone_data() Вернуть аргументы ключевого слова, подходящие для клонирования этого вызова в другой.
-
make_context( конфигурация ) Сгенерировать
Context, подходящий для этого вызова, с заданной конфигурацией.
-
-
invoke.tasks.NO_DEFAULT= <объект объект> Объект Sentinel, представляющий действительно пустое значение (по сравнению с
None).
- class
invoke.tasks.Задача( body , name = None , aliases = () , positional = None , optional = () , default = False , auto_shortflags = True , help = Нет , pre = Нет , post = Нет , autoprint = False , iterable = Нет , с увеличением = Нет ) Основной объект, представляющий исполняемую задачу и спецификацию ее аргумента.
По большей части этот объект является центром обмена всеми данными, которые может быть передан декоратору
@task, напримеримя,псевдонимы,позиционныйи т. Д., Которые отображаются как атрибуты.Кроме того, при создании экземпляра копируются некоторые дружественные к самоанализу / документации. метаданные предоставленного объекта
body, например__doc__,__name__и__module__, что позволяет ему «отображаться как»bodyдля большинство намерений и целей.-
__weakref__ список слабых ссылок на объект (если определен)
-
argspec( корпус ) Возвращает два кортежа:
Первый элемент — это список имен аргументов в определенном порядке.
- Т.е. мы не можем просто использовать здесь метод dict
keys ().
- Т.е. мы не можем просто использовать здесь метод dict
Второй элемент — это dict сопоставление имен аргументов значениям по умолчанию или
NO_DEFAULT(«пустое» значение, отличное от None, поскольку None является допустимым значением само по себе).
-
get_arguments() Вернуть список объектов Argument, представляющих подпись этой задачи.
-
-
invoke.tasks.звоните( задача , * args , ** kwargs ) Описывает выполнение
Задачи, обычно с предварительно заданными аргументами.Используется для настройки вызовов до и после выполнения задач.На самом деле это просто удобная обертка около класса
Call, который при желании можно использовать напрямую.Например, вот две задачи, похожие на сборку, обе относятся к настройке
, вызов), и тот, который переключает логический флаг:@task def setup (c, clean = False): если чистый: c.run ("rm -rf target") # ... настройте здесь ... c.run ("tar czvf target.tgz target ") @task (pre = [настройка]) def build (c): c.run ("сборка, учет оставшихся файлов ...") @task (pre = [call (setup, clean = True)]) def clean_build (c): c.run ("строить, с чистого листа ...")См. Документацию по конструктору для
Подробности по телефону— эта функцияargsиkwargsотображаются непосредственно на те же аргументы, что и в этом метод.
-
invoke.tasks.задача( * args , ** kwargs ) Помечает упакованный вызываемый объект как допустимую задачу Invoke.
Может вызываться без скобок, если не требуется дополнительных параметров. указано. В противном случае в в круглых скобках:
-
имя: Имя по умолчанию для использования при привязке к коллекции -
псевдонимов: укажите один или несколько псевдонимов для этой задачи, разрешив ее вызывается как несколько разных имен.Например, задача с именемmytaskс простой оболочкой@taskможно вызывать только как«mytask». Изменение декоратора на@task (aliases = ['myothertask'])позволяет вызов как«mytask»или«myothertask». -
позиционный: Итерационный переопределение автоматических аргументов синтаксического анализатора без значение по умолчанию считается позиционным »поведением. Если список аргументов имена, никакие аргументы, кроме названных в этой итерации, не будут рассматриваться позиционный.(Это означает, что пустой список заставит все аргументы быть заданы как явные флаги.) -
необязательно: Итерация имен аргументов, объявление этих аргументов иметь необязательные значения. Такие аргументы могут быть заданные как параметры, принимающие значение (например,--my-arg = myvalue, где задается"myvalue") или в виде логических флагов (--my-arg, в результате вИстинно). -
итерация: Итерация имен аргументов, объявляющая их для построения повторяемые значения. -
инкрементируемый: Итерация имен аргументов, объявляющая их увеличивать их значения. -
по умолчанию: логический параметр, определяющий, должна ли эта задача быть его задача коллекции по умолчанию (т.е. вызывается, если собственное имя коллекции дано.) -
auto_shortflags: Следует ли автоматически создавать короткие флаги из опций задачи; по умолчанию True. -
help: Диктовка имен аргументов сопоставления со строками справки.Будет отображается в выводе--help. Для аргументов, содержащих символы подчеркивания (которые по умолчанию преобразуются в тире в интерфейсе командной строки), либо здесь может быть поставлена пунктирная или подчеркнутая версия. -
до,после: Списки объектов задач для выполнения до или после, завернутую задачу всякий раз, когда она выполняется. -
autoprint: логическое значение, определяющее, печатать ли это автоматически возвращаемое значение задачи в стандартный вывод при прямом вызове через интерфейс командной строки.По умолчанию False. -
klass: Класс для создания / возврата. По умолчаниюЗадача.
Если указаны какие-либо аргументы, не являющиеся ключевыми словами, они принимаются как значение
докварг для удобства. (Ошибочно указывать оба* argsидоодновременно.)Изменено в версии 1.1: Добавлен аргумент ключевого слова
klass.-